






ARM模式和Thumb模式之间的切换,需要修 改Thumb标志位:
在ARM模式下可以使用BX(Branch and Exchange)指令和BLX(Branch, Link and Exchange)指令来将Thumb标识位置1,从而从 ARM模式切换到Thumb模式。
BX指令和BLX的指令的区别在于,BX除了切换状 态之后,只完成了一个指令跳转的功能(相当于 JMP指令,直接跳转),而BLX指令更像是x86架 构下的CALL指令(会有保存返回地址和重要寄存器 等操作。
ARM指令结构
ARM汇编指令的语法格式
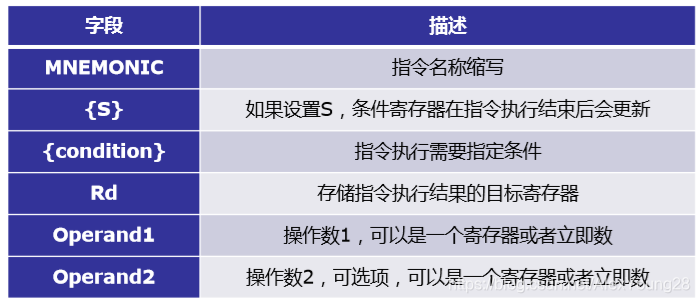
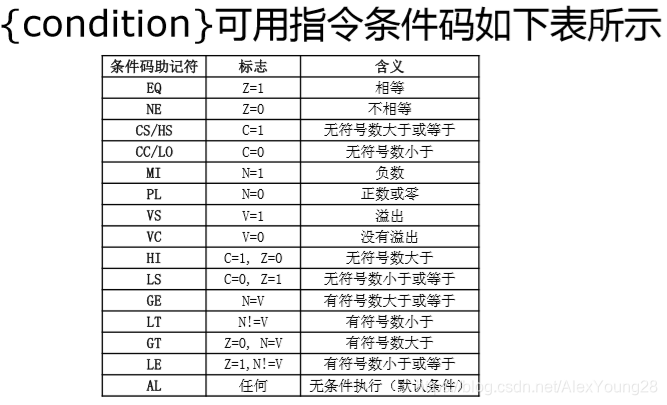
{condition}决定该条指令只有在满足条件时,才会被 执行(主要用在比较指令),该字段依赖于CPSR状态 寄存器的状态。
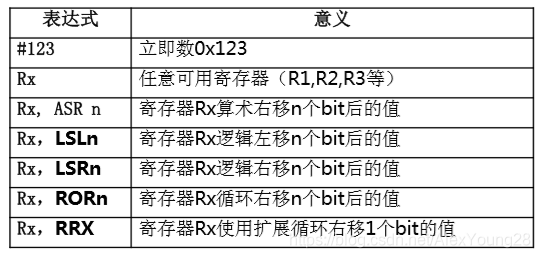
Operand2,又叫弹性操作数,可以使用的类型包括立 即数、寄存器及带有位运算的寄存器。
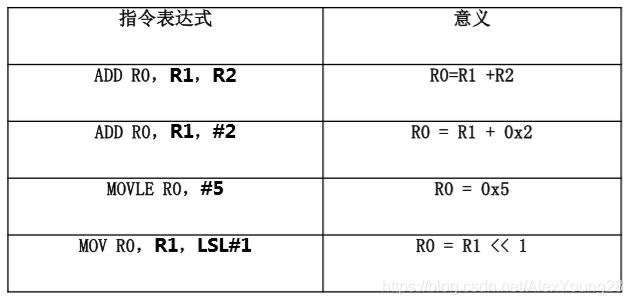
指令示例
ARM寻址类型
立即寻址
立即寻址指代指令中包含的立即数,通常用户给寄存器赋初值。

寄存器寻址
寄存器寻址表示操作数来源于寄存器中
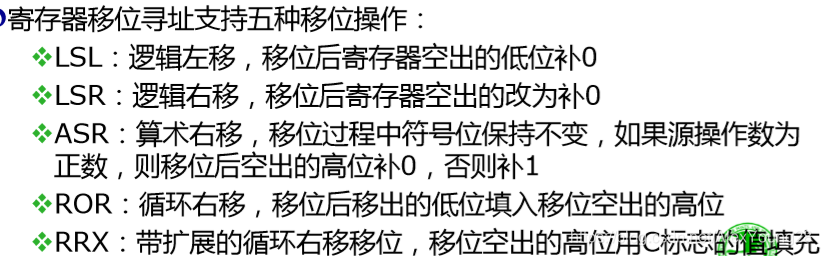
寄存器移位寻址
寄存器移位寻址(即桶位移)是ARM指令集中特有的寻址方式
寄存器移位寻址与寄存器寻址类似,只是在进行实际指令操作前,需 要对寄存器中存储的操作数进行移位操作。
寄存器移位寻址
![]()
指令的功能是将R1寄存器左移3位,即“R1<<3”后的值赋给 R0寄存器
寄存器间接寻址
寄存器间接寻址中实际操作数来自于寄存器中保存的指针指向 的内存
![]()
如果R1存储的地址为0x12345678, 而内存0x12345678中 存储的值为0xdeadbeaf,那么指令执行结束后R0的值为 0xdeadbeaf
基址寻址
基址寻址是将地址码给出的基址寄存器与偏移量相 加,形成最终的内存访问地址
基址寄存器常用于查表、数组访问等操作。

表示从内存R1-4作为内存访问地址(#表示后面的 是一个立即数),从内存中取出值放到R0寄存器中
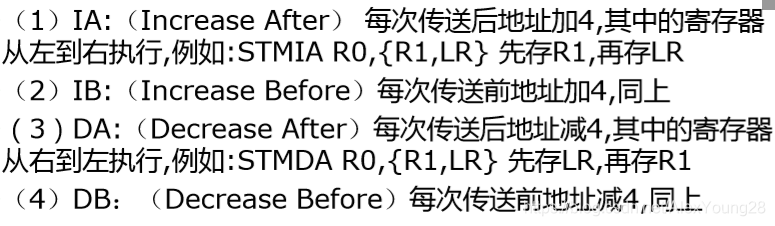
多寄存器寻址
多寄存器寻址可以在一条指令中实现从内存中加载 多个值到寄存器中,寄存器的数量最多为16个。
![]()
LDM是数据加载指令,指令后缀IA表示每完成一个 寄存器的加载,R0的值自增一个字,在32位ARM 处理器中,一个字占的空间是4个字节。在这条指令 执行结束后,R1=[R0], R2=[R0+4], R3=[R0+8], R5=[R0+12]
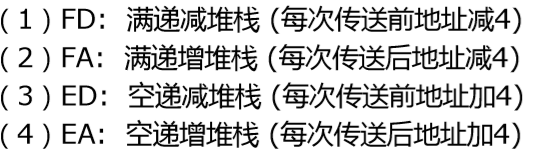
堆栈寻址
堆栈寻址用于从栈上存取数据
常用的堆栈操作指令有LDMFA/STMFA、 LDMEA/STMEA、LDMFD/STMFD、LDMED/STMED。
LDM和STM为指令前缀
LDM:(load much)多数据加载,将栈地址上的值加载到寄存器上
STM:(store much)多数据存储,将寄存器的值存到栈地址上
STMFD SP!, {R1-R7, LR}
表示将R1~R7,LR这8个寄存器压入栈
后缀
ARM寻址类型
块拷贝寻址
块拷贝寻址用于连续从存储器的某一位置拷贝数据到另一 位置,这种方式本质上和多寄存器寻址是类似的。
![]()
表示从R0指向的存储单元中连续读取3个字(对应 3个寄存器),存储到R1-R3寄存器中。
相对寻址
相对寻址以程序计数器PC的当前值作为基地址,指令中的地 址标号作为偏移量,将两者相加之后得到操作数的有效地址
对于BL指令,与指令“MOV R0,R1”之间的偏移量就是指令 偏移量,BL指令执行结束后,PC会更新为指令“MOV R0,R1” 的地址
例如BL FUNC1和MOV R0, R1的距离为0x10,则编译后BL FUNC1为BL 0x10
ARM常用指令介绍
MOV指令
它的功能是将立即数或者寄存器的值拷贝到目标寄 存器。


MVN是数据非传送指令
它的功能是将立即数或者寄存器值按位取反后拷贝 到目标寄存器中。
![]()

ADD指令


SUB是减法指令
它的功能是用Rn寄存器减去operand2的值,结果 拷贝到Rd寄存器中。


MUL是32位乘法指令
它的功能是将Rm寄存器与Rn寄存器的值相乘,结 果的低32位保存到Rd寄存器


STM是数据存储指令
用于将寄存器列表的值 保存到指定的存储单元中。

PUSH是堆栈操作指令。
它的格式如下: PUSH{condition}reglist
PUSH指令示例如下:
PUSH {R0,R4-R7} @将R0,R4-R7这五个寄 存器压入到堆栈
POP是堆栈操作指令
指令功能是从堆栈中弹出数据到寄存器列表。它的 格式如下:

POP指令示例如下:
POP {R0,R4-R7} @从堆栈上弹出数据到R0, R4-R7这五个寄存器
B是跳转指令
B指令是最简单的跳转指令,指令跳转使用当前PC 加上指令后面的偏移量来计算出新的PC地址。
![]()
BL是链接的跳转指令
当执行BL指令时,如果条件满足,会首先将当前指 令的下一条指令的地址拷贝到R14(也称LR)寄存 器中,然后跳转到label处的指令继续执行。当函数 执行完毕后,子函数通过“MOV PC,LR”回到主 函数。
![]()
BX是带状态切换的跳转指令
当执行BX指令时,如果条件满足,处理器会判断 Rm的最低位是否为1,如果为1则在跳转的同时将 CPSR寄存器的标志T置位,并将目标地址处的代码 解释为Thumb指令;反之将CPSR寄存器的标志T 恢复,并将目标代码处的指令解释为ARM指令。
![]()
BLX是带链接和状态切换的跳转指令
本质上这条指令结合了BL和BX的功能,当条件满 足的时候,除了设置链接寄存器之外,还会根据 Rm最低位的状态还修改处理器的状态。

SWI/SVC是软中断指令
该指令用于产生软中断,从而实现从用户模式到管 理模式的切换,如系统功能调用。指令格式如下:
![]()
在Android系统中,系统功能调用为0号中断,使用R7寄 存器存放系统调用号。使用R0-R3寄存器来保存系统调用 的前4个参数,对于大于4个参数的系统调用,剩余参数采 用堆栈传递。
ARM调试环境
可以选择使用ARM开发板、树莓派或者 Android设备来调试分析ARM汇编指令
除了使用ARM硬件来进行调试分析,也可以使 用QEMU来搭建ARM调试环境。

















 2180
2180

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









