



 SIFT算法是一种局部特征检测方法,具有旋转、尺度缩放不变性和稳定性。它用于在图像中寻找稳定的关键点并生成描述符,广泛应用于物体匹配,尤其在面对旋转、缩放和光照变化时。
SIFT算法是一种局部特征检测方法,具有旋转、尺度缩放不变性和稳定性。它用于在图像中寻找稳定的关键点并生成描述符,广泛应用于物体匹配,尤其在面对旋转、缩放和光照变化时。
引言
SIFT特征点检测算法是一种检测局部特征的算法,是在适当的条件下完成两幅图像中物体的匹配。
SIFT算法的特点
- SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性。
- 独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配。
- 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量。
- 高速性,经优化的SIFT匹配算法甚至可以达到实时的要求。
- 可扩展性,可以很方便的与其他形式的特征向量进行联合。
SIFT算法的原理
具体内容
详细解释
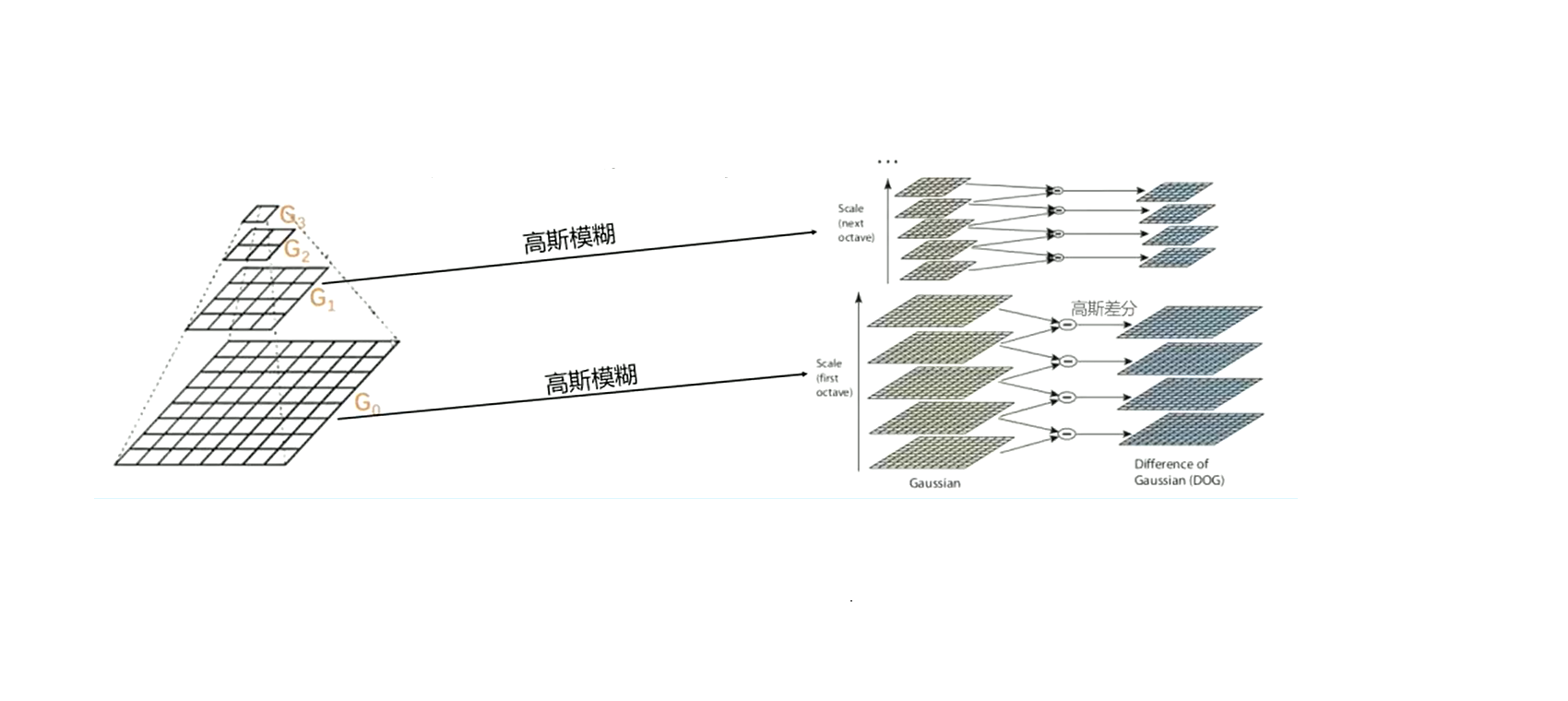
- 尺度空间极值检测:搜索所有尺度上的图像位置,通过高斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点。
- 关键点定位:在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度,关键点的选择依据于它们的稳定程度。
- 方向确定:基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向,所有后面的对图像数据的操作都相对于关键的方向、尺度和位置进行变换,从而提供对于这些变换的不变性。
- 关键点描述:在每个关键点周围的邻域内,在选定的尺度上测量图像局部的梯度,这些梯度被变换成一种表示,这种表示允许比较大的局部形状的变化和光照变化。
结论
SIFT算法的应用是在适当的条件下完成两幅图像中物体的匹配。如果两幅图像中的物体一般只是旋转和缩放的关系,加上图像的亮度及对比度的不同,要在这些条件下要实现物体之间的匹配,只要找到多于三对物体间的匹配点就可以通过射影几何的理论建立它们的一一对应。因此,SIFT算法的基础是稳定点。

















 2121
2121

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









