



篇幅所限,本文只提供部分资料内容,完整资料请看下面链接
https://download.youkuaiyun.com/download/AI_data_cloud/89533869
资料解读:《智慧社区智能化整体规划方案》
详细资料请看本解读文章的最后内容。
本方案围绕世纪凤凰城高端社区的定位,提出了一套以“高端实用、技术成熟先进、系统稳定完善、人性化管理”为核心设计理念的智能化整体规划。方案旨在构建一个科技感与舒适度并存的现代化居住环境,全面满足业主对安全、便捷、舒适生活的需求,同时提升物业管理的效率与水平。规划内容系统性地涵盖了公共安全、信息设施、控制平台三大核心板块,各子系统之间既独立运行又相互联动,共同构筑起智慧社区的坚实基础。
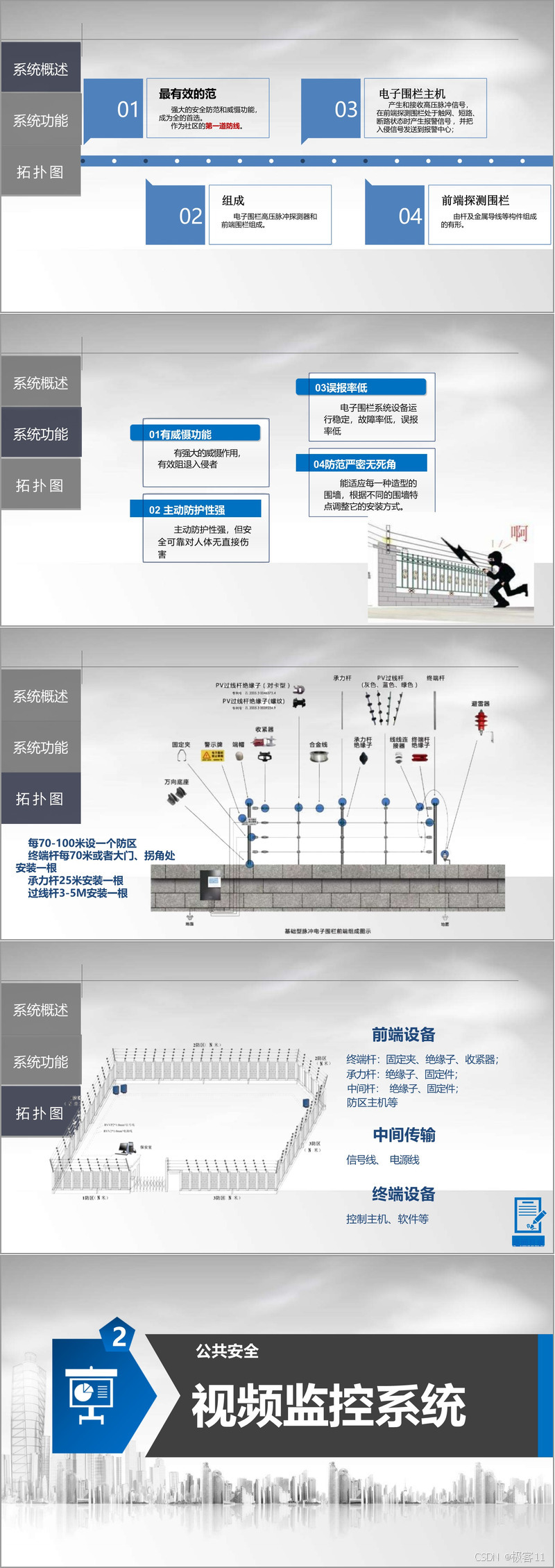
在公共安全领域,方案设计了一道道严密的技术防线。社区周界首当其冲,规划采用脉冲电子围栏系统作为第一道强有力的保护屏障。该系统具备强大的威慑功能和主动防护性,能有效阻退入侵者,且误报率低。系统可与监控系统联动,一旦发生触网、短路或断路情况,不仅能立即报警,还能联动附近摄像机进行跟踪摄录,并在监控中心的电子地图上实时显示报警区域,便于安保人员快速响应。此外,系统还考虑了物业管理的实际需求,设置了无声报警指示灯和就地复位装置,以便于对安保人员的出警工作进行督促和考核。
视频监控系统作为社区安全的第二道屏障,部署力求无死角。摄像机将广泛分布于社区出入口、主要道路、公共景观带、楼宇前后等公共区域,单元门厅、电梯轿厢、楼梯间等楼内空间,以及地下车库的出入口、车行干道、单元地下入口等处。系统功能全面,包括视频实时监控、多模式录像存储与智能回放查询、动态监测、以及多系统联动报警。显示部分采用拼接屏技术,可根据需要灵活组合,实现高清、大画面的监控效果。
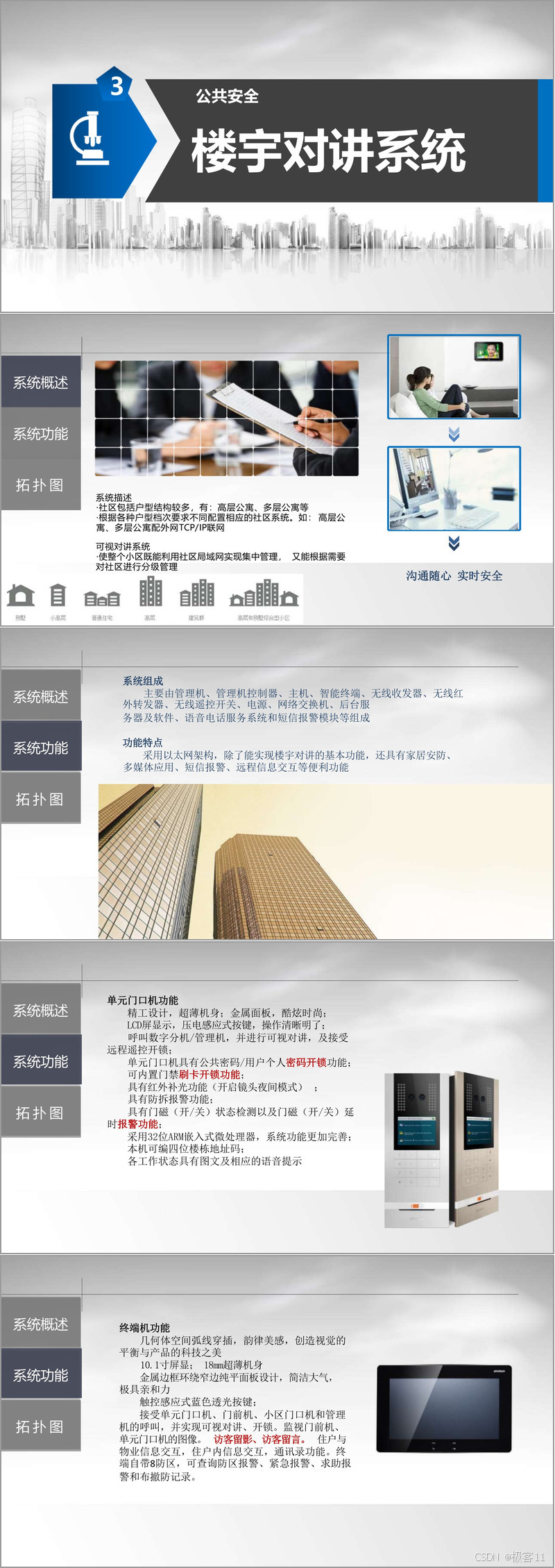
楼宇对讲系统是社区安全与便捷生活的重要一环。系统采用先进的以太网架构,集成了可视对讲、门禁控制、家居安防、信息交互等多种功能。访客可通过小区围墙机、单元门口机呼叫住户室内分机,经业主确认身份后,系统可远程开锁并可联动呼叫电梯,实现无缝衔接的访客管理。室内智能终端不仅外观设计现代时尚,更具备强大的功能,如访客留影留言、与物业信息交互、内置多防区报警系统(可接入燃气探测器、紧急按钮等),为住户,特别是老人和儿童,提供了贴心的安全守护。
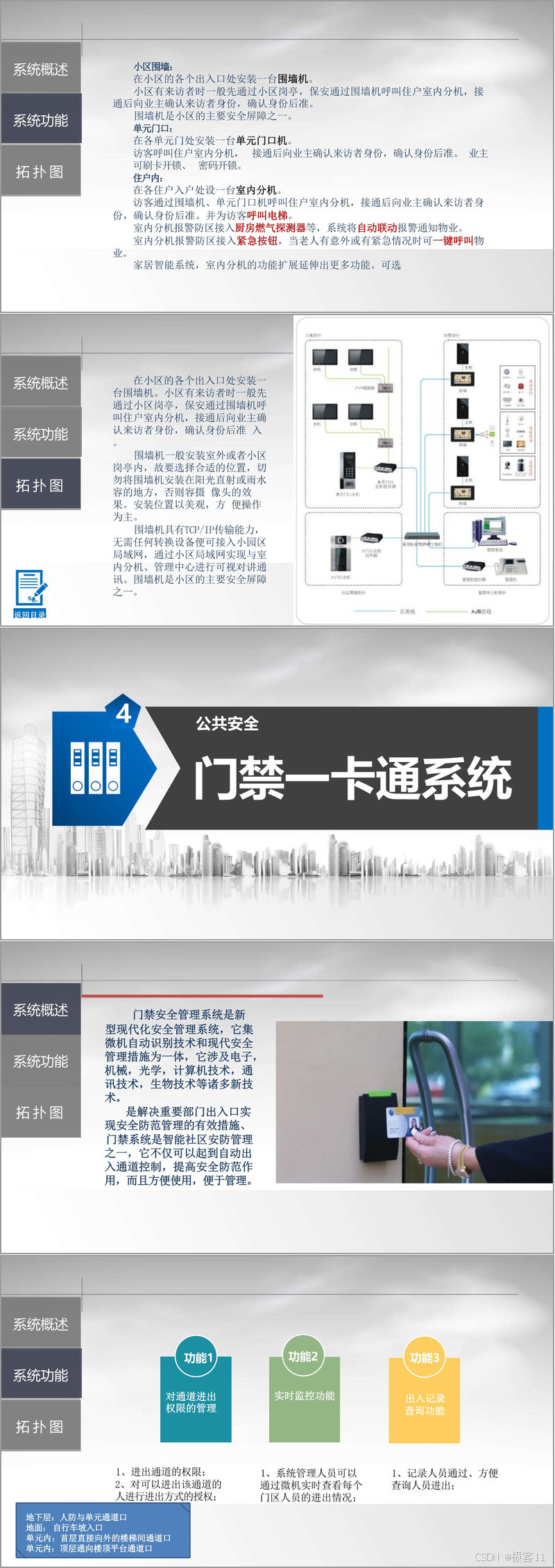
门禁一卡通系统则对社区内的关键通道进行智能化管理,覆盖地下层人防与单元通道、自行车坡入口、以及单元内通向楼顶平台等出入口。系统具备进出权限管理、实时监控和出入记录查询功能,有效提升了区域的安全防范等级。电梯控制系统通过IC卡权限管理,实现了乘梯的分层控制,既保障了住户的私密性与安全性,也规范了电梯的使用。电子巡更系统通过无线巡更棒与巡更点的配合,方便了对保安巡逻工作的数字化考核与管理,进一步提升了人防技防结合的效果。
车辆管理部分引入车牌识别技术,实现不停车快速通行,有效解决了传统刷卡方式带来的种种不便,如卡片携带、丢失、损坏以及临时车辆管理漏洞等问题,提升了出入口通行效率和用户体验。人行通道闸系统同样采用智能卡授权通行,记录详尽,控制灵活,安全可靠,实现了人员进出的自动化管理。
在信息设施方面,背景音乐及紧急广播系统为社区营造了轻松愉快的氛围。扬声器根据环境特点均匀布置,系统具备播放背景音乐、进行人工业务广播以及优先级的消防广播功能。LED公告屏系统用于社区信息的动态发布,支持文字、图片、视频等多种媒体形式。信息网络系统则规划了全面的无线对讲机信号覆盖以保障物业通信,并在公共活动区域部署WiFi系统,为智慧社区应用提供网络基础。此外,方案还考虑了便民设施,如集中设置的智能快递箱和电动车智能充电站,后者具备多种计费、操作模式和安全保护措施,解决了电动车充电的安全与管理难题。
控制平台是整个智能化系统的神经中枢。监控中心集中部署了各子系统的控制终端,进行24小时不间断的实时监控与调度。平台客户端集成了实时监视、录像回放、电子地图、报警管理等核心功能。方案对机房建设提出了明确要求,包括功能分区、环保装修、防静电地板等。供电系统采用双路电源加UPS不间断电源组合,后备时间不小于2小时,确保系统稳定运行。防雷接地系统则被特别强调,其建设质量直接关系到昂贵设备的安全和系统的抗干扰能力。最后,综合管线与综合布线系统作为所有智能化系统的“血管”和“神经网络”,其合理规划为各系统的有序连接、未来扩展和维护提供了基础保障。
综上所述,该规划方案内容详实,结构清晰,技术选型兼顾先进性与实用性,系统设计注重稳定与联动,管理理念体现人性化与高效化,为将世纪凤凰城打造成为一个真正意义上的高端智慧社区描绘了清晰的蓝图。
接下来请您阅读下面的详细资料吧。




















 860
860

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











