



篇幅所限,本文只提供部分资料内容,完整资料请看下面链接
https://download.youkuaiyun.com/download/AI_data_cloud/91694185
资料解读:(47 页 PPT)智慧城管整体解决方案
详细资料请看本解读文章的最后内容。随着城市化进程加速,城市管理的复杂性与精细化需求日益凸显,智慧城管作为智慧城市建设的核心组成部分,其整体解决方案旨在通过技术赋能实现城市治理的提质增效。该方案系统梳理了智慧城管的建设逻辑、核心架构与实施路径,为城市管理从传统模式向智能化转型提供了全面指引。
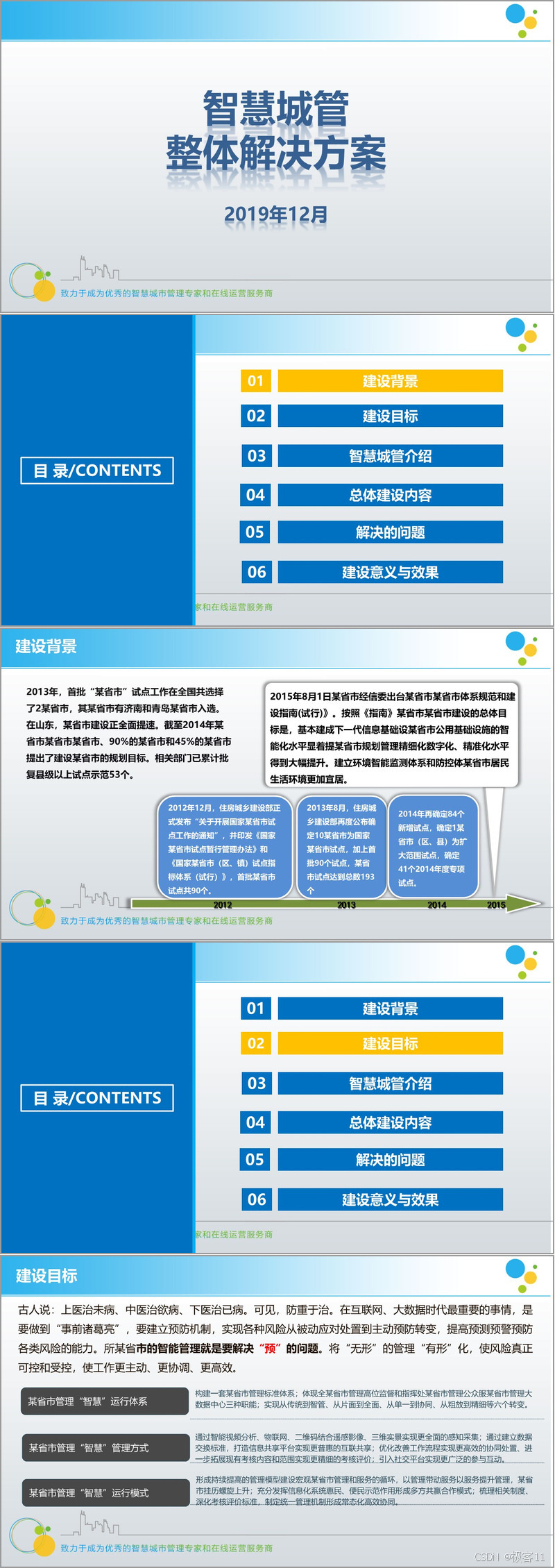
从建设背景来看,智慧城管的发展源于国家政策的持续推动。2012 年起,住房城乡建设部陆续启动国家智慧城市试点,截至 2015 年已形成多批次、广覆盖的试点格局,山东等省份更是将智慧城市建设纳入重点规划,推动市县层面的落地实施。2015 年某省市经信委出台的建设指南,进一步明确了以精细化、数字化为核心的发展目标,为智慧城管的标准化建设提供了政策依据。
建设目标聚焦于 “预防为先” 的治理理念,核心是构建 “智慧” 运行体系。通过建立统一的管理标准体系,实现监督指挥、公众服务、大数据中心三大职能协同,推动城市管理从被动处置向主动预防、从单一管理向多元协同、从粗放运营向精细管控等六大转变。其管理方式强调全维度感知(智能视频分析、物联网、遥感等)、全渠道互联(数据共享平台)、全流程协同(优化处置流程)与全主体参与(社交平台互动),最终形成 “感知、分析、服务、指挥、监察” 五位一体的运行模式。
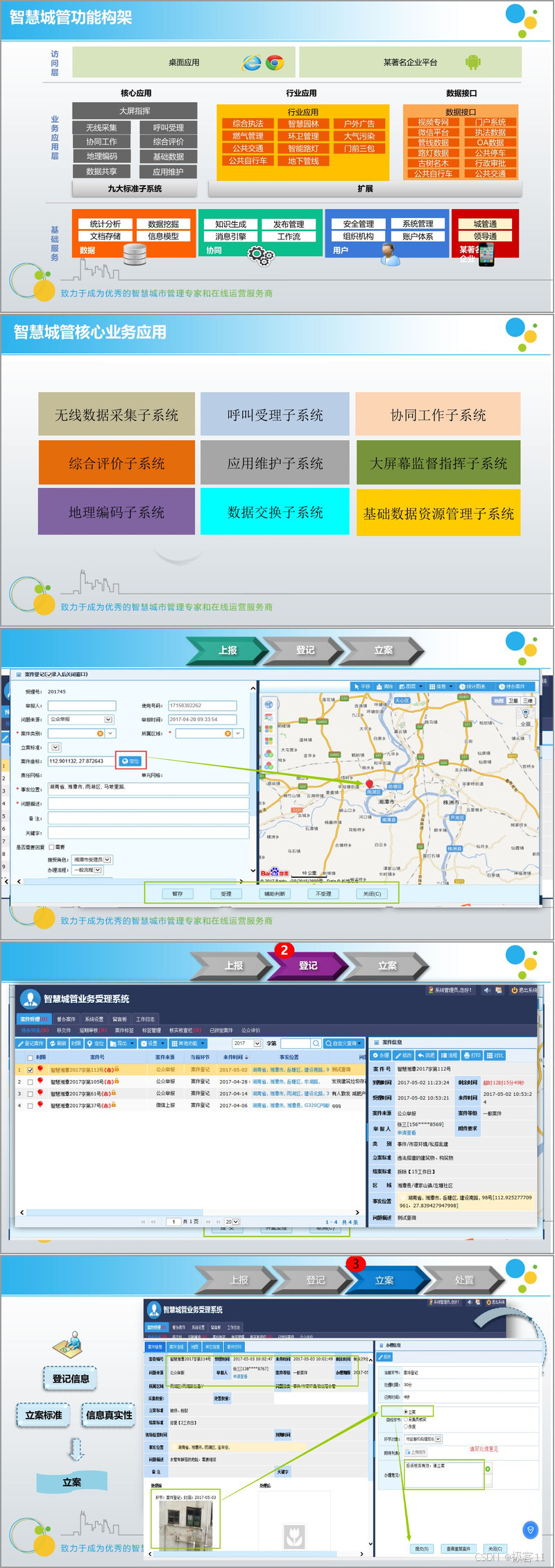
智慧城管的核心内涵是对数字城管的融合与升华。相较于以 “万米单元网格管理法” 和 “城管通” 为核心的数字城管,智慧城管通过融入物联网、云计算、大数据等新技术,实现了监管精细化、职能协同化、决策智能化的升级。其架构采用 “1+1+1+7+N” 模式:即一个监督指挥中心、一个市政管理大数据中心、一套标准管理体系、七个核心平台(统一支撑、指挥调度、公众服务等),并开放接入公安、交通等 N 个外部系统,形成全域协同的治理网络。同时,通过构建技术标准、建设标准、采集标准等十大标准体系,保障系统高效有序运行。
在具体建设内容上,方案构建了多层次架构体系。数据支撑层提供云计算、存储与通信能力;网络传输层整合互联网、政务网与物联网;感知交互层通过摄像头、传感器、移动终端等实现全域感知;业务应用层则涵盖大屏监控、指挥调度、巡查执法等具体功能。重点打造全维度感知体系,包括智能视频分析(违规行为自动识别)、GPS / 北斗定位(人员车辆轨迹追踪)、遥感影像(城市面貌动态监测)等,同时拓展环卫、园林、燃气、户外广告等行业监管应用,实现管理场景全覆盖。
核心业务流程以 “问题闭环处置” 为核心:通过采集员上报、公众举报、智能感知等多渠道发现问题,经登记、立案、派遣、处置、核查、结案等环节形成闭环,依托移动终端与指挥平台实现全流程数字化管控。此外,大数据分析平台对案件来源、处置效率、高发问题等进行深度挖掘,为管理决策提供数据支撑;公众服务模块则通过微信、APP 等渠道畅通市民参与路径,形成 “共建共治共享” 的治理格局。
该方案有效解决了传统城市管理的四大痛点:一是明确部门职责与处置流程,避免推诿扯皮;二是通过标准化网格划分与部件管理,实现精细化管控;三是建立 “定额化 — 考核化 — 日常化” 的考评体系,强化责任落实;四是整合专业采集、部门自查与群众反馈等多渠道信息,提升问题发现的全面性与及时性。
其建设意义与成效体现在四个维度:一是实现管理业务 “全覆盖”,通过纵横协同机制打通部门壁垒;二是达成 “智管全局”,通过动态管控与静态分析实现全要素监管;三是推动 “慧源于民、惠及民生”,引导公众参与提升城市认同感;四是促进 “传统政府向效能政府” 转型,以数据驱动决策,实现科学治理与精准治理。
接下来请您阅读下面的详细资料吧。





















 770
770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











