



篇幅所限,本文只提供部分资料内容,完整资料请看下面链接
https://download.youkuaiyun.com/download/AI_data_cloud/89575163
资料解读:数字智慧方案智慧校园解决方案
详细资料请看本解读文章的最后内容。
在数字化浪潮的推动下,智慧校园建设成为提升教育管理水平、保障校园安全、优化教学资源配置的关键举措。该智慧校园解决方案围绕校园的安全保障、资源管理、教学支持等多方面需求展开,致力于打造一个全面、高效、智能的校园环境。
一、项目需求与建设目标
- 项目需求:涵盖多个领域的建设项目,包括弱电管网、综合布线、网络系统、云数据中心、多媒体教学、安防系统(门禁、监控、报警等)、后勤管理(能耗、照明、广播等)以及各类平台(数据交换、认证、一站式服务等),旨在满足校园在信息化、安全管理、教学服务等方面的需求。
- 建设目标:通过建立高清智能视等实时监测监控体系,实现对校园态势的全程监控,清晰展示安防事件过程和校园整体运行状况,同时具备高效的指挥调度与现场处置能力,快速处理突发事件。
二、解决方案系统组成
- 系统架构:以校园数据为核心,构建包含采集层、传输层、应用层和用户层的架构,通过数据共享交换平台、统一认证平台和统一门户,实现校园治理的数字化、精细化、智能化。
- 功能系统
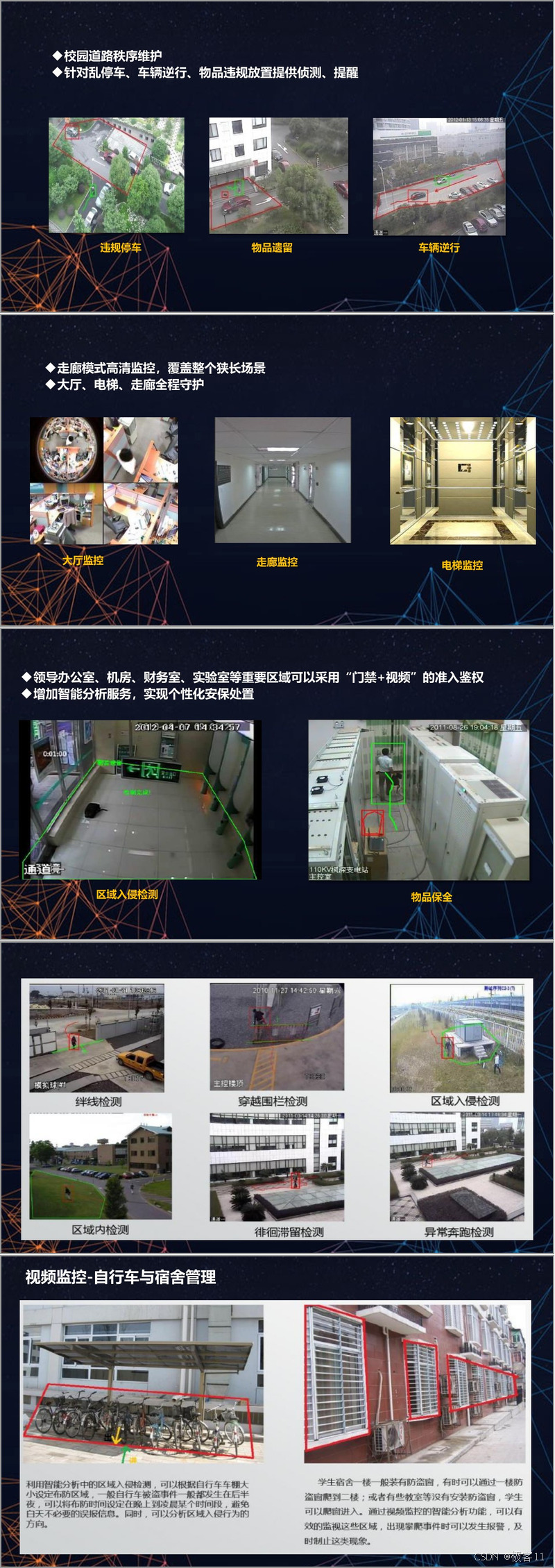
- 安防系统:包括入侵报警、出入口控制、巡更、视频监控等子系统,利用智能分析技术实现对人员、车辆的实时监控和异常行为预警,如区域入侵、人员徘徊、车辆逆行等检测报警,保障校园安全。
- 运维管理系统:对各类设备进行状态监测、故障诊断和报修管理,提供图形化报表展示运维结果,确保系统稳定运行。
- 能耗管理系统:实现校园能耗的动态监控、趋势分析和数据查询,助力校园节能降耗,涵盖电梯、路灯、给排水、照明等多方面的节能管理。
- 教学支持系统:录播直播系统满足优课录制、互动教学等需求;公共广播系统用于校园广播、英语听力考试等;信息发布系统通过多终端展示校园信息;会议系统支持多终端接入,实现高效沟通。
- 便捷通行与管理系统:包括访客管理、人员和车辆权限管理,支持远程登记预约,通过人脸检测实现便捷通行,并提供报表统计功能。
- 大数据与服务平台:大数据分析平台对系统运行数据进行监控和分析,构建学员成长档案和用户画像;一站式服务平台提供多维度服务响应渠道,实现服务的高效流转、归档和数据分析。
三、监控点规划与设备选型原则
- 监控点规划思路:采用 “围、补、连、合” 的规划思路,围绕安防控制目标区域形成封闭圈,连接重点部位出入口,合理补点避免覆盖盲区,整合社会资源辅助治安防控。
- 立杆点位选择原则:综合考虑距离、光照、遮挡、供电等因素,确保监控画面质量和用电安全,同时满足不同监控场景的需求,如拍摄行人脸部特征、校车上下车人员等。
- 不同摄像机类型立杆选择原则:根据枪型和球型摄像机的特点,选择合适的杆件高度,同时结合监控距离和取景方向确定横臂长度,避免遮挡,达到最佳监控效果。
四、智慧园区平台性能参数与数据源接入
- 平台性能参数:具备强大的人脸识别和数据处理能力,包括对年龄、性别的识别,高分辨率图片识别,多人脸检测与抓拍,以及快速的查询和入库速度等。
- 数据源接入情况:支持多种方式接入图片和视频流,兼容主流摄像头厂商和多种数据格式、存储协议,确保数据的稳定获取和存储。
该智慧校园解决方案通过全面的系统规划、合理的监控布局和先进的技术应用,为校园提供了一套完整的智能化管理体系,有助于提升校园的安全性、管理效率和教学质量,推动校园的数字化转型。
接下来请您阅读下面的详细资料吧。





















 756
756

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











