




 本文介绍了OpenCV中用于相机标定的calibrateCamera函数,涉及内参矩阵、畸变系数、外参计算,以及如何通过优化方法设置初始值来提高标定精度。作者强调了不同参数的选择和调整策略。
本文介绍了OpenCV中用于相机标定的calibrateCamera函数,涉及内参矩阵、畸变系数、外参计算,以及如何通过优化方法设置初始值来提高标定精度。作者强调了不同参数的选择和调整策略。
彩色角点图片镇楼
opencv官方文档:
https://docs.opencv.org/4.8.0/d4/d94/tutorial_camera_calibration.html
https://docs.opencv.org/3.4.18/d9/d0c/group__calib3d.html#gaebfc1c9f7434196a374c382abf43439b
相机标定目的:
cv::calibrateCamera()的函数调用可以得到相机内参矩阵、畸变系数、旋转矩阵和平移矩阵(即每一幅图像的姿态和位置)。前两者构成相机内参,后两者称为外参。
畸变系数可以用来矫正图像。使用工业相机标定后,感觉图像畸变很小,所以买了一个USB免驱的摄像头(100块),货到之后再标定相机一次看看效果。相机内参矩阵可以让我们将3D坐标转为2D图像坐标。
double cv::calibrateCamera( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints,
Size imageSize,
InputOutputArray cameraMatrix,
InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs,
OutputArrayOfArrays tvecs,
int flags = 0,
TermCriteria criteria = TermCriteria(
TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON) );
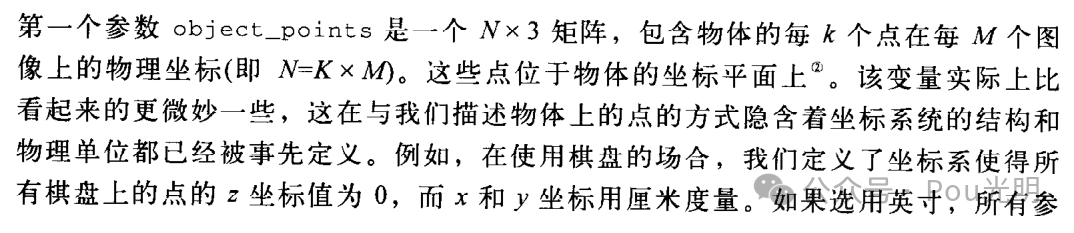
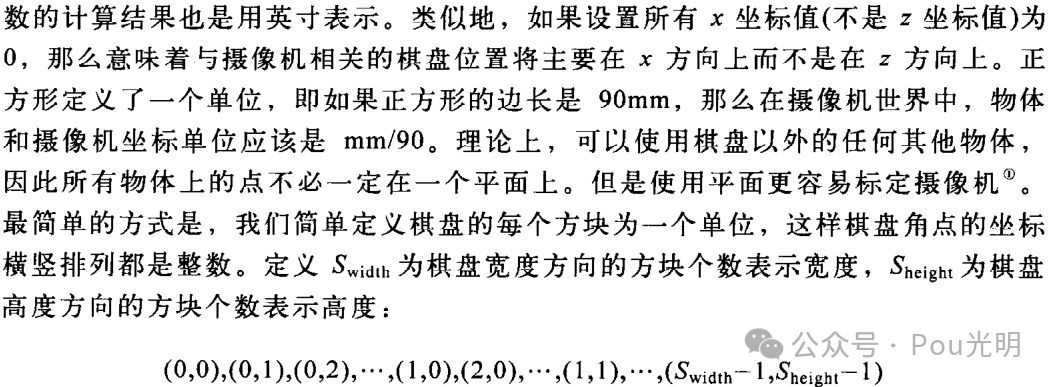
objectPoints:
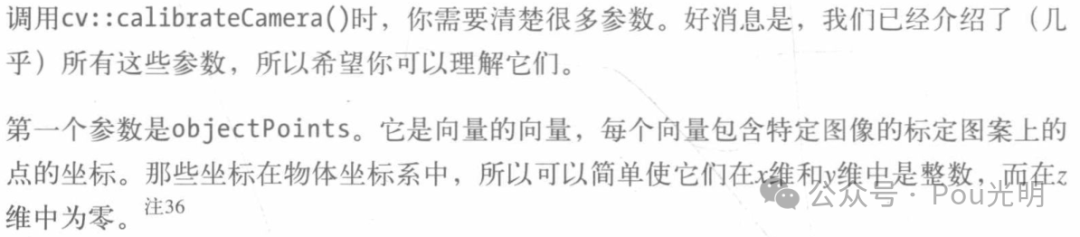
imagePoints: 使用标定板标定时,直接填findCirclesGrid()返回值.
imageSize:图像的像素大小
cameraMatrix和distCoeffs是相机的内参。前者是线性内参,是3×3矩阵。后者可能是是4、5、8个元素。4:k1,k2,p1,p2. 5:k1,k2,p1,p2,k3. 五元素形式通常只适用于鱼眼透镜。只有设置cv::CALIB_RATIONAL_MODE时,且对非常高精度的特殊透镜进行校准时,才能使用8个元素。注意,需要的图像数量随着求解参数数量而急剧增加。
rvecs和tvecs是外参信息。它们说明在每幅图片中标定板相对于相机的姿态和位置。需要注意的是:旋转以Rodrigues形式表示,即以三分量向量表示,不是之前机器人学里面所述3×3矩阵表示的姿态,而是棋盘绕相机坐标系下三维空间的坐标轴的旋转,其中每个向量的长度表示逆时针旋转的角度。可通过Rodrigues()转为3×3矩阵。如前所述,相机坐标系的单位以棋盘格的方块单位为准,即cv::Size squareSize = cv::Size(10,10)(如有误再勘正)。根据上篇文章,是10cm.
通过优化方法找到这些参数是一个富有技巧性的工作。如果设置的初始值位置远离实际解,有时试图一次性求解所有参数会导致结果不精确或者不收敛。因此通常需要猜测解以得到更好地初始值。因此我们常常固定某些参数而求另外一些参数,然后再固定另外的参数求解原始的固定参数。依次往复,最后可以认为所有参数都接近真实解,然后使用所有参数作为初始值一次性输入。OpenCV允许你控制所有的标志位。标志位变量是用来做某些细微的控制使得标定能够完成的更好。
ps:觉得还是旧版学习OpenCV好一些。写这么多,都是在介绍函数接口如何使用。

















 5125
5125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









