



题目要求:
程序实现:
main.c
/*头文件声明区*/
#include <STC15F2K60S2.H>
#include <Init.h>
#include <Key.h>
#include <Led.h>
#include <Seg.h>
#include <Uart.h>
#include <Stdio.h>
#include <onewire.h>
#include <iic.h>
#include <String.h>
/*头文件变量声明区*/
unsigned char Key_val,Key_Down,Key_Up,Key_Old;
idata unsigned char Seg_Buf[8] = {16,16,16,16,16,16,16,16};
idata unsigned char Seg_Point[8] = {0,0,0,0,0,0,0,0};
idata unsigned char ucLed[8] = {0,0,0,0,0,0,0,0};
unsigned int Slow_Down;
bit Seg_flag,Key_flag;
idata unsigned char Uart_Recv[10];
unsigned char Uart_Recv_Index;
bit Uart_flag;
unsigned char Sys_Tick;
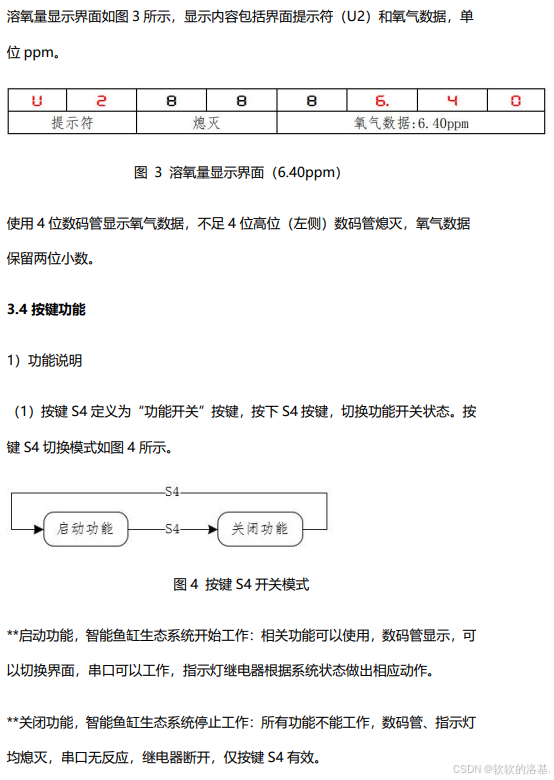
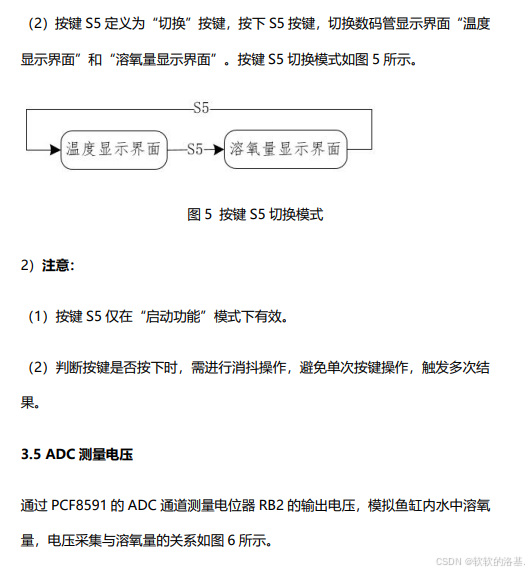
bit Seg_Disp_Mode;//0-温度显示界面 1-溶氧量显示界面
float T;
bit Qingdong;//0-关闭功能 1-启动功能
float dac;
float dac_Disp;
bit Toushi_Flag;
unsigned int Timer_3000ms;
void Delay750ms() //@12.000MHz
{
unsigned char i, j, k;
_nop_();
_nop_();
i = 35;
j = 51;
k = 182;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
/*键盘处理函数*/
void Key_Proc()
{
if(Key_flag) return;
Key_flag = 1;
Key_val = Key_Read();
Key_Down = Key_val & (Key_val ^ Key_Old);
Key_Up = ~Key_val & (Key_val ^ Key_Old);
Key_Old = Key_val;
switch(Key_Down)
{
case 4:
Qingdong ^= 1;
if(Qingdong == 1)
Seg_Disp_Mode = 0;
break;
case 5:
if(Qingdong == 1)
Seg_Disp_Mode ^= 1;
break;
}
}
/*信息处理函数*/
void Seg_Proc()
{
if(Seg_flag) return;
Seg_flag = 1;
T = rd_wendu();
dac = Ad_read(0x43) / 51.0 * 2;
if(Qingdong == 1)
{
if(Seg_Disp_Mode == 0)//温度显示界面
{
Seg_Buf[0] = 17;//U
Seg_Buf[1] = 1;
Seg_Buf[5] = (unsigned int)(T*10) / 100 % 10;
Seg_Point[5] = 0;
Seg_Buf[6] = (unsigned int)(T*10) / 10 % 10;
Seg_Point[6] = 1;
Seg_Buf[7] = (unsigned int)(T*10) % 10;
}
if(Seg_Disp_Mode == 1)//溶氧量显示界面
{
Seg_Buf[0] = 17;//U
Seg_Buf[1] = 2;
Seg_Buf[4] = (unsigned int)(dac*100) / 1000 % 10;
Seg_Buf[5] = (unsigned int)(dac*100) / 100 % 10;
Seg_Point[5] = 1;
Seg_Buf[6] = (unsigned int)(dac*100) / 10 % 10;
Seg_Point[6] = 0;
Seg_Buf[7] = (unsigned int)(dac*100) % 10;
if(Seg_Buf[4] == 0)
Seg_Buf[4] = 16;
}
}
if(Qingdong == 0)
{
Seg_Buf[0] = Seg_Buf[1] = Seg_Buf[4] = Seg_Buf[5] = Seg_Buf[6] = Seg_Buf[7] = 16;
Seg_Point[5] = Seg_Point[6] = 0;
}
}
/*其他显示函数*/
void Led_Proc()
{
ucLed[0] = Qingdong;
if(Qingdong==1)
{
Relay(dac < 3);
ucLed[1] = (Seg_Disp_Mode == 0);
ucLed[2] = (Seg_Disp_Mode == 1);
ucLed[5] = (T>26||T<20);
ucLed[7] = Toushi_Flag;
}
else
{
ucLed[1] = ucLed[2] = ucLed[5] = ucLed[7] = 0;
Relay(0);
}
}
/*串口处理函数*/
void Uart_Proc()
{
if(Uart_Recv_Index == 0) return;
if(Sys_Tick >= 10)
{
Sys_Tick = Uart_flag = 0;
if(Qingdong == 1)
{
if(Uart_Recv_Index == 1)
{
if(Uart_Recv[0] == '1')
printf("C:%.1f\r\n",T);
if(Uart_Recv[0] == '2')
printf("D:%.2fppm\r\n",dac);
}
if(Uart_Recv_Index == 6)
{
if(Uart_Recv[0] == 'O'&&Uart_Recv[1] == 'p'&&Uart_Recv[2] == 'e'&&Uart_Recv[3] == 'n'&&Uart_Recv[4] == '\r'&&Uart_Recv[5] == '\n')
Toushi_Flag = 1;
}
}
memset(Uart_Recv,0,Uart_Recv_Index);
Uart_Recv_Index = 0;
}
}
/*定时器1初始化*/
void Timer1Init(void) //1毫秒@12.000MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x18; //设置定时初值
TH1 = 0xFC; //设置定时初值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1;
EA = 1;
}
/*定时器1中断服务程序*/
void Timer1server() interrupt 3
{
if(++Slow_Down == 400)
Seg_flag = Slow_Down = 0;
if(Slow_Down % 10 == 0)
Key_flag = 0;
if(Uart_flag) Sys_Tick++;
Seg_Disp(Slow_Down % 8,Seg_Buf[Slow_Down % 8],Seg_Point[Slow_Down % 8]);
Led_Disp(Slow_Down % 8,ucLed[Slow_Down % 8]);
if(Toushi_Flag == 1)
{
if(++Timer_3000ms==3000)
{
Toushi_Flag = 0;
Timer_3000ms = 0;
printf("%s","Over!");
}
}
}
/*串口1中断服务程序*/
void Uart1server() interrupt 4
{
if(RI == 1)
{
Sys_Tick = 0;
Uart_flag = 1;
Uart_Recv[Uart_Recv_Index] = SBUF;
Uart_Recv_Index++;
RI = 0;
}
if(Uart_Recv_Index > 10)
Uart_Recv_Index = 0;
}
/*主函数*/
void main()
{
T = rd_wendu();
Delay750ms();
System_Init();
Timer1Init();
UartInit();
while(1)
{
Key_Proc();
Seg_Proc();
Led_Proc();
Uart_Proc();
}
}Uart.c
#include <Uart.h>
#include <Stdio.h>
void UartInit() //9600bps@12.000MHz
{
SCON = 0x50; //8位数据,可变波特率
AUXR |= 0x01; //串口1选择定时器2为波特率发生器
AUXR |= 0x04; //定时器2时钟为Fosc,即1T
T2L = 0xC7; //设定定时初值
T2H = 0xFE; //设定定时初值
AUXR |= 0x10; //启动定时器2
ES = 1;
EA = 1;
}
extern char putchar (char ch)
{
SBUF = ch;
while(TI == 0);
TI = 0;
return ch;
}
onewire.c
#include <onewire.h>
void Delay_OneWire(unsigned int t)
{
unsigned char i;
while(t--){
for(i=0;i<12;i++);
}
}
//
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
float rd_wendu()
{
unsigned char low,high;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low = Read_DS18B20();
high = Read_DS18B20();
return((high << 8) | low) / 16.0;
}
iic.c
#include <iic.h>
#define DELAY_TIME 10
//
static void I2C_Delay(unsigned char n)
{
do
{
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
}
while(n--);
}
//
void I2CStart(void)
{
sda = 1;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 0;
I2C_Delay(DELAY_TIME);
scl = 0;
}
//
void I2CStop(void)
{
sda = 0;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 1;
I2C_Delay(DELAY_TIME);
}
//
void I2CSendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++){
scl = 0;
I2C_Delay(DELAY_TIME);
if(byt & 0x80){
sda = 1;
}
else{
sda = 0;
}
I2C_Delay(DELAY_TIME);
scl = 1;
byt <<= 1;
I2C_Delay(DELAY_TIME);
}
scl = 0;
}
//
unsigned char I2CReceiveByte(void)
{
unsigned char da;
unsigned char i;
for(i=0;i<8;i++){
scl = 1;
I2C_Delay(DELAY_TIME);
da <<= 1;
if(sda)
da |= 0x01;
scl = 0;
I2C_Delay(DELAY_TIME);
}
return da;
}
//
unsigned char I2CWaitAck(void)
{
unsigned char ackbit;
scl = 1;
I2C_Delay(DELAY_TIME);
ackbit = sda;
scl = 0;
I2C_Delay(DELAY_TIME);
return ackbit;
}
//
void I2CSendAck(unsigned char ackbit)
{
scl = 0;
sda = ackbit;
I2C_Delay(DELAY_TIME);
scl = 1;
I2C_Delay(DELAY_TIME);
scl = 0;
sda = 1;
I2C_Delay(DELAY_TIME);
}
unsigned char Ad_read(unsigned char addr)
{
unsigned char temp;
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0x91);
I2CWaitAck();
temp = I2CReceiveByte();
I2CSendAck(1);
I2CStop();
return temp;
}
测试结果:

补充:
第14届模拟题目均考察了串口,还有超声波,在备考蓝桥杯单片机的时候,刷完14届模拟题你的串口就掌握差不多了,希望我对你有所帮助!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









