






这是一篇关于PyTorch神经网络工具箱及其在图像识别技术中应用的文章,主要介绍了神经网络的核心组件、构建神经网络的主要工具、构建模型的方法、自定义网络模块以及训练模型的流程。以下是对这些核心内容的简要概述:
神经网络核心组件:
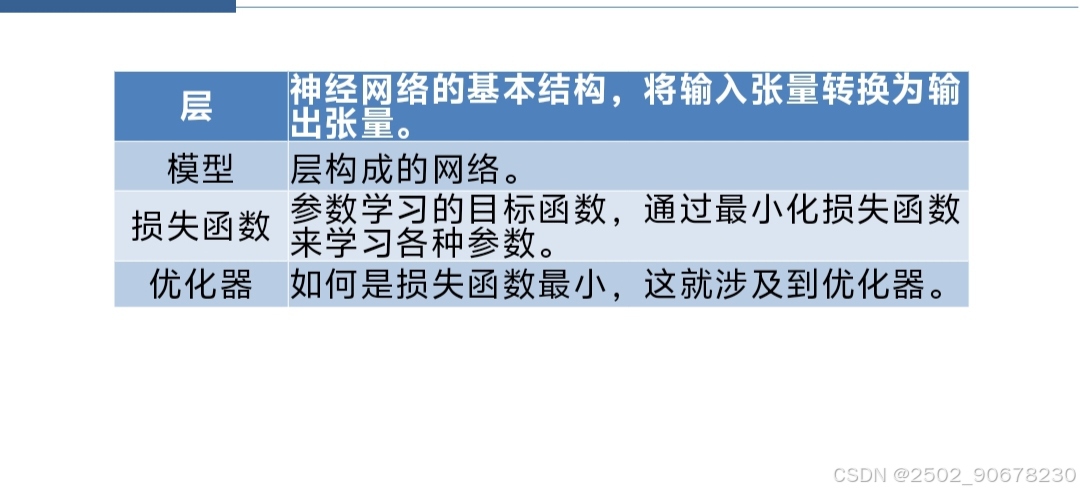
层:神经网络的基本结构,将输入张量转换为输出张量。
模型:由层构成的网络。
损失函数:参数学习的目标函数,通过最小化损失函数来学习各种参数。
优化器:决定如何使损失函数最小化。
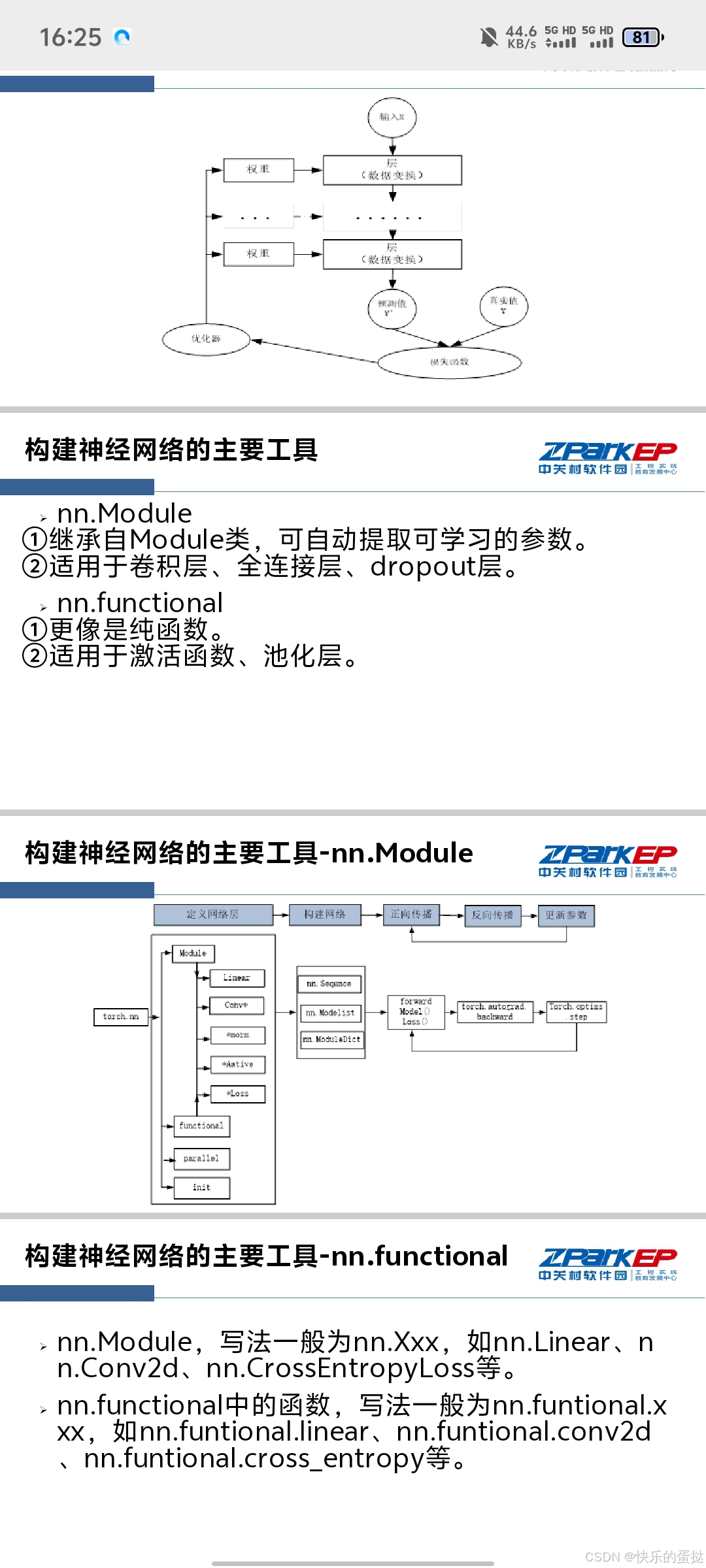
构建神经网络的主要工具:
nn.Module:继承自Module类,可自动提取可学习的参数,适用于卷积层、全连接层、dropout层。
nn.functional:更像是纯函数,适用于激活函数、池化层。
nn.Module与nn.functional的区别:
继承与实例化:nn.Xxx继承于nn.Module,需要先实例化并传入参数,以函数调用的方式调用实例化的对象并传入输入数据;nn.functional.xxx无法与nn.Sequential结合使用。
参数管理:nn.Xxx不需要自己定义和管理weight、bias参数;nn.functional.xxx需要手动定义weight、bias,每次调用时都需要手动传入,不利于代码复用。
dropout操作:使用nn.Xxx方式定义dropout,在调用model.eval()之后,自动实现状态的转换;使用nn.functional.xxx无此功能。
构建模型的方法:
继承nn.Module基类:通过继承基类nn.Module来构建模型,使用nn.Sequential按层顺序构建模型。
使用nn.Sequential:利用可变参数Seq_arg按层顺序构建模型,或使用add_module方法、OrderedDict方法为每个层指定名称。
使用模型容器:使用nn.Sequential、nn.ModuleList、nn.ModuleDict等模型容器进行封装。
自定义网络模块:
残差块:一种是将输入与输出相加,然后应用激活函数ReLU;另一种是为使输入与输出形状一致,需添加通过1×1卷积调整通道和分辨率。
ResNet18网络结构:组合这两种残差块,得到现代经典ResNet18网络结构,包括卷积层、批量归一化层、最大池化层、自适应平均池化层以及全连接层。
训练模型:
流程:包括加载预处理数据集、定义损失函数、定义优化方法、循环训练模型、循环测试或验证模型以及可视化结果。
这篇文章为使用PyTorch构建和训练神经网络模型提供了详细的指导,并通过介绍各种组件和工具,展示了如何有效地设计和实现神经网络架构。
在文档中提到的神经网络核心组件中,nn.Module和nn.functional之间的主要区别是什么?
在文档中提到的神经网络核心组件中,nn.Module和nn.functional之间的主要区别如下:
继承与实例化:
nn.Xxx继承于nn.Module,需要先实例化并传入参数,然后以函数调用的方式调用实例化的对象并传入输入数据。
nn.functional.xxx无法与nn.Sequential结合使用。
参数管理:
nn.Xxx不需要自己定义和管理weight、bias参数。
nn.functional.xxx需要手动定义weight、bias,每次调用时都需要手动传入,不利于代码复用。
Dropout操作:
使用nn.Xxx方式定义dropout,在调用model.eval()之后,自动实现状态的转换。
使用nn.functional.xxx无此功能。
这些区别在实际应用中影响模型的设计和实现如下:
代码复用和简洁性:
使用nn.Module可以更方便地管理和复用模型层,避免每次手动传入参数,使代码更加简洁。
模型构建的灵活性:
nn.functional提供了更多的灵活性,可以在不实例化层的情况下直接使用函数,适用于一些需要动态调整网络结构的场景。
训练和测试状态的自动转换:
使用nn.Module定义的dropout层可以在训练和测试阶段自动转换状态,无需手动调整,这有助于简化代码并减少错误。
在实际应用中,根据具体需求选择合适的工具可以更高效地设计和实现神经网络模型。
如何利用PyTorch实现一个动态调整网络结构的模型?
在PyTorch中实现一个动态调整网络结构的模型,可以通过使用nn.Module和nn.functional结合来实现。以下是一个简单的例子,展示如何根据输入数据的维度动态调整网络结构:
import torch
import torch.nn as nn
import torch.nn.functional as F
class DynamicNet(nn.Module):
def __init__(self):
super(DynamicNet, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1)
self.bn1 = nn.BatchNorm2d(64)
self.conv2 = nn.Conv2d(64, 128, kernel_size=3, stride=1, padding=1)
self.bn2 = nn.BatchNorm2d(128)
self.fc = nn.Linear(128, 10)
def forward(self, x):
# 动态调整网络结构
if x.size(1) == 1: # 如果输入是单通道
x = self.conv1(x)
x = F.relu(self.bn1(x))
x = F.max_pool2d(x, kernel_size=2, stride=2)
x = self.conv2(x)
x = F.relu(self.bn2(x))
x = F.max_pool2d(x, kernel_size=2, stride=2)
else: # 如果输入是多通道
x = F.relu(self.conv1(x))
x = F.max_pool2d(x, kernel_size=2, stride=2)
x = F.relu(self.conv2(x))
x = F.max_pool2d(x, kernel_size=2, stride=2)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
# 示例
input1 = torch.randn(10, 1, 32, 32) # 单通道输入
input2 = torch.randn(10, 3, 32, 32) # 多通道输入
model = DynamicNet()
output1 = model(input1)
output2 = model(input2)
在这个例子中,DynamicNet模型根据输入数据的通道数动态调整网络结构。如果输入是单通道数据(x.size(1) == 1),则使用一个特定的卷积层序列;如果输入是多通道数据,则使用另一个卷积层序列。
通过这种方式,可以在运行时根据输入数据的特性动态调整网络结构,从而实现更灵活和适应不同输入场景的模型。




动态网络结构在训练时有什么特殊要求?
动态网络结构在训练时有一些特殊要求,主要体现在以下几个方面:
输入数据的多样性:
动态网络结构通常需要处理不同维度或不同特性的输入数据。因此,在训练时,需要确保训练数据集包含各种类型的输入,以便模型能够学习到在不同输入条件下的行为。
动态计算图:
PyTorch使用动态计算图,这意味着网络结构可以在运行时动态构建和调整。在训练时,每次前向传播都会根据输入数据动态生成计算图。因此,需要确保前向传播逻辑正确处理了所有可能的输入情况。
梯度计算:
动态网络结构可能会涉及条件分支、循环等控制流语句。在计算梯度时,需要确保这些控制流语句不会影响梯度传播的正确性。PyTorch的自动微分机制通常能够处理这种情况,但复杂的动态结构可能需要特别注意。
参数更新:
动态网络中可能包含多个分支,每个分支可能涉及不同的参数。在训练时,需要确保所有分支的参数都能得到适当的更新。这可能需要仔细设计优化器的参数组,以确保每个参数都能根据其参与的前向传播路径得到正确的梯度更新。
性能优化:
动态网络结构可能会带来额外的计算开销,特别是在涉及大量条件分支和循环的情况下。在训练时,可能需要对这些动态结构进行性能优化,以确保训练效率。例如,可以使用torch.jit来编译部分动态计算图,以提高执行效率。
调试和验证:
由于动态网络结构的复杂性,训练过程中可能需要更多的调试和验证工作。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









