






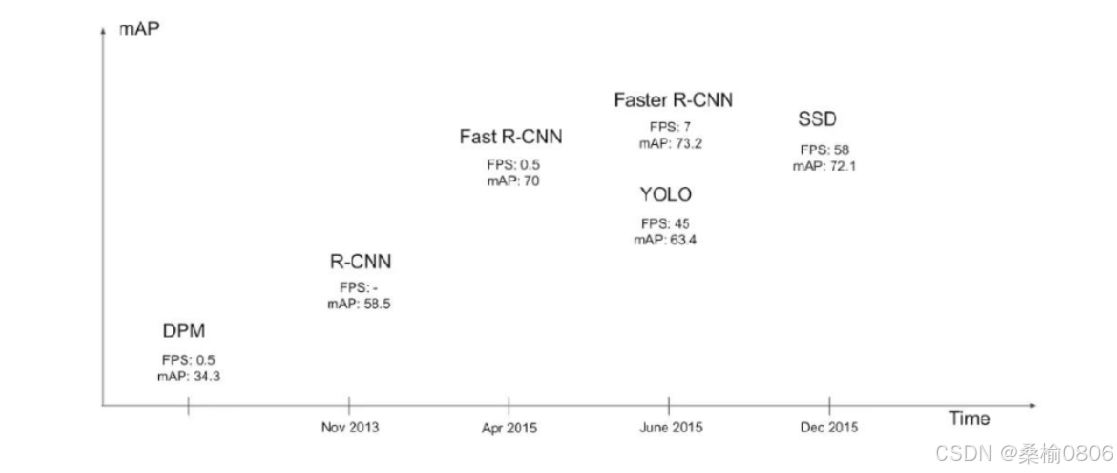
YOLO系列
·YOLO-V1
- 经典的one - stage方法
- You Only Look Once,名字就已经说明了一切!
- 把检测问题转化成回归问题,一个CNN就搞定了!
- 可以对视频进行实时检测,应用领域非常广!
·YOLO-V1
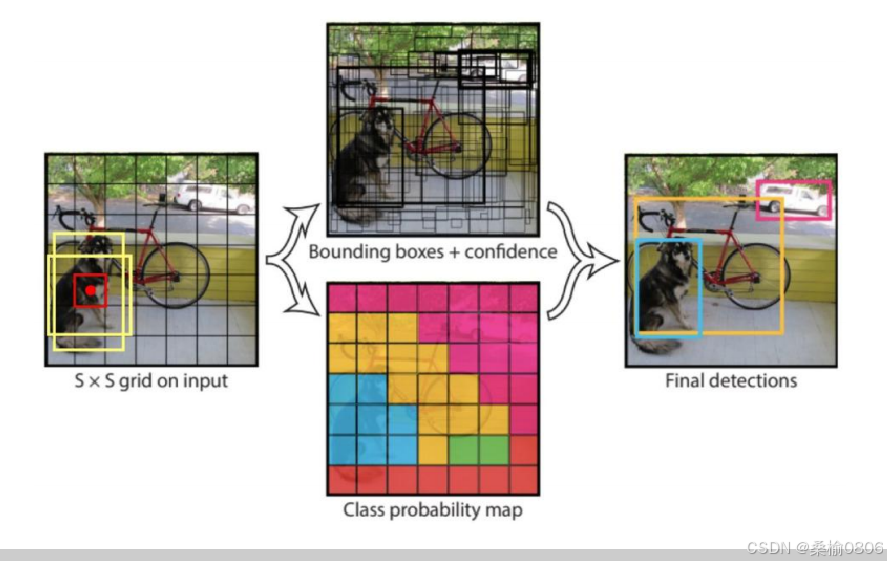
·核心思想
·网络架构
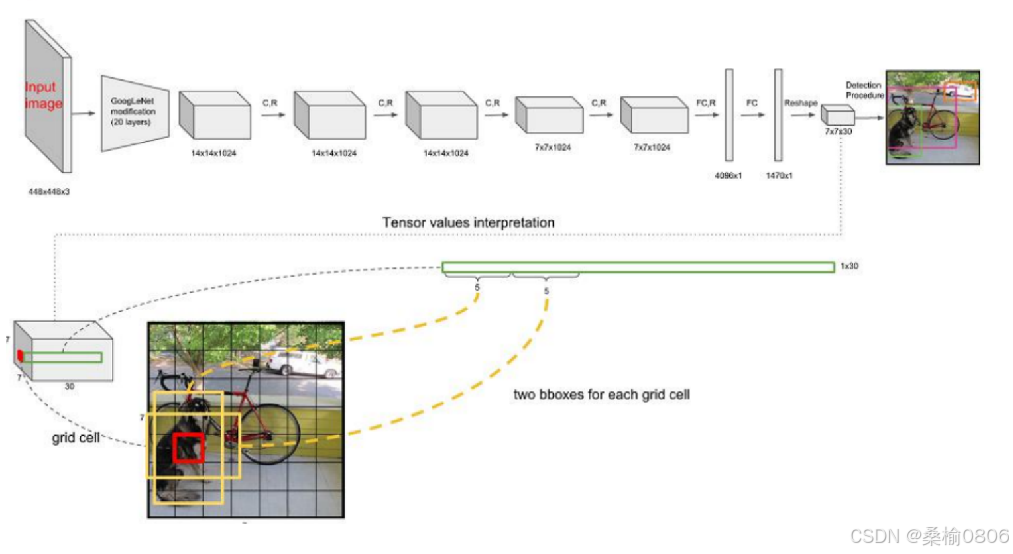
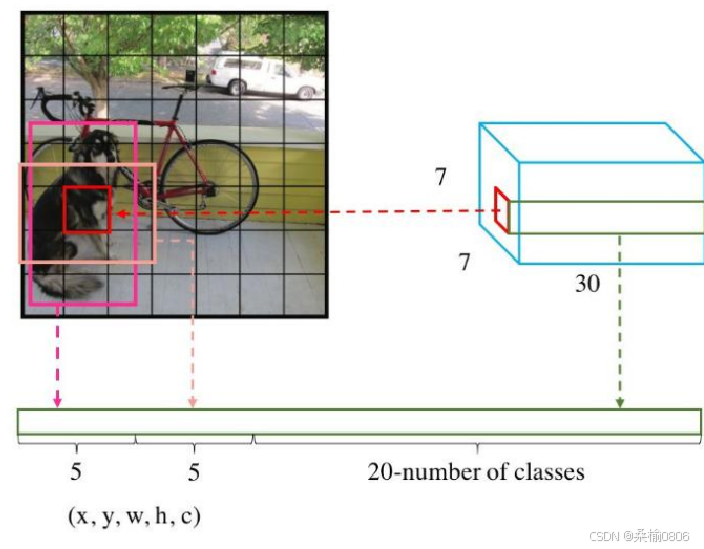
·每个数字的含义:
- 10 = (X,Y,H,W,C)*B(2个类别)
- 当前数据集中有20个类别
- 7*7表示最终网格的大小
- (SS) * (B5+C)
·损失函数:

·NMS(非极大值抑制):
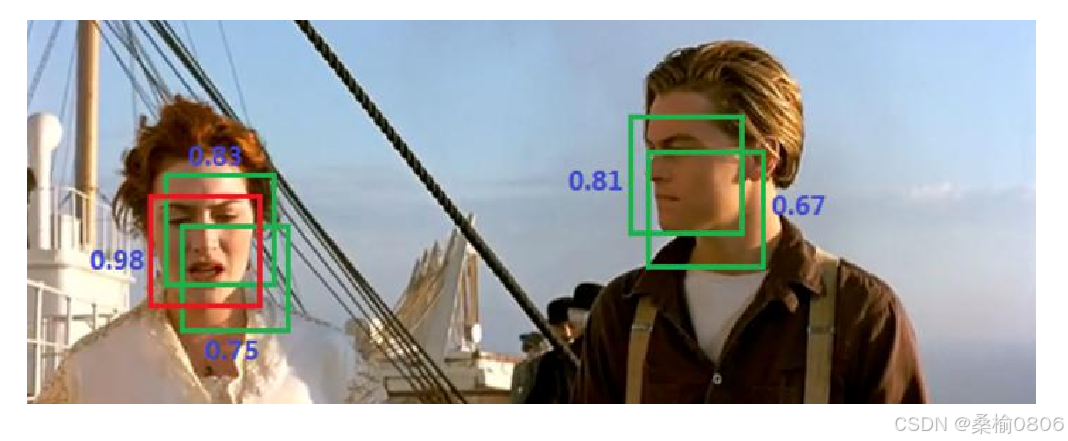
·YOLO-V1:
- 优点:快速,简单!
- 问题1:每个Cell只预测一个类别,如果重叠无法解决
- 问题2:小物体检测效果一般,长宽比可选的但单一
·YOLO-V2:更快!更强!
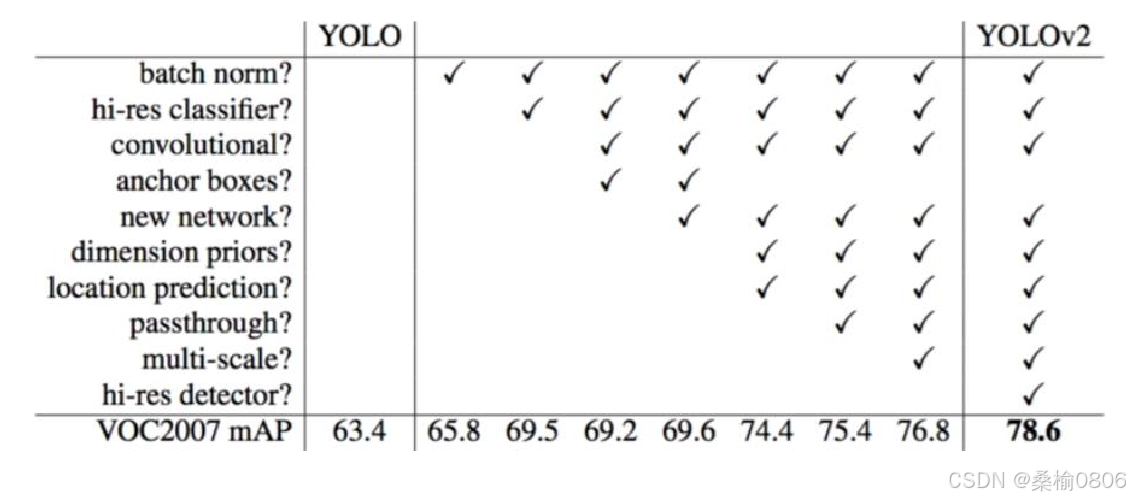
·YOLO-V2 - Batch Normalization
- V2版本舍弃Dropout,卷积后全部加入Batch Normalization
- 网络的每一层的输入都做了归一化,收敛相对更容易
- 经过Batch Normalization处理后的网络会提升2%的mAP
- 从现在的角度来看,Batch Normalization已经成网络必备处理
·YOLO-V2 - 更大的分辨率
- V1训练时用的是224*224,测试时使用448*448
- 可能导致模型水土不服,YOLOv2训练时额外进行了10次448*448的微调
- 使用高分辨率分类器后,YOLOv2的mAP提升了约4%
·YOLO-V2 - 聚类提取先验框
- 数据集一系列选择的先验比例都是常规的,但是不一定完全适合
- K - means聚类中的距离:d(box, centroids) = 1 - IOU(box, centroids)
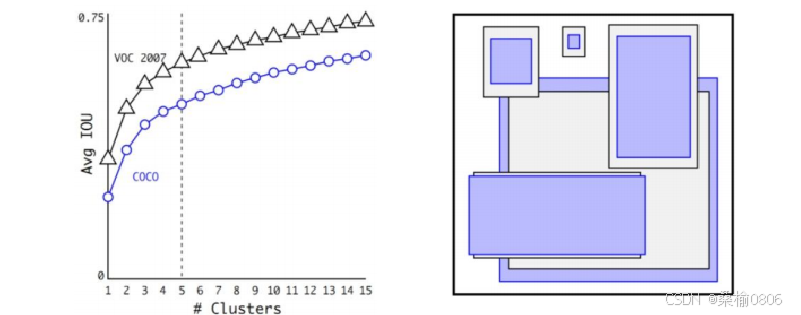
·YOLO-V2 - Anchor Box
- 通过引入anchor boxes,使得预测的box数量更多(13*13*n)
- 跟Faster - rcnn系列不同的是先验框并不是直接按照长宽固定比给定
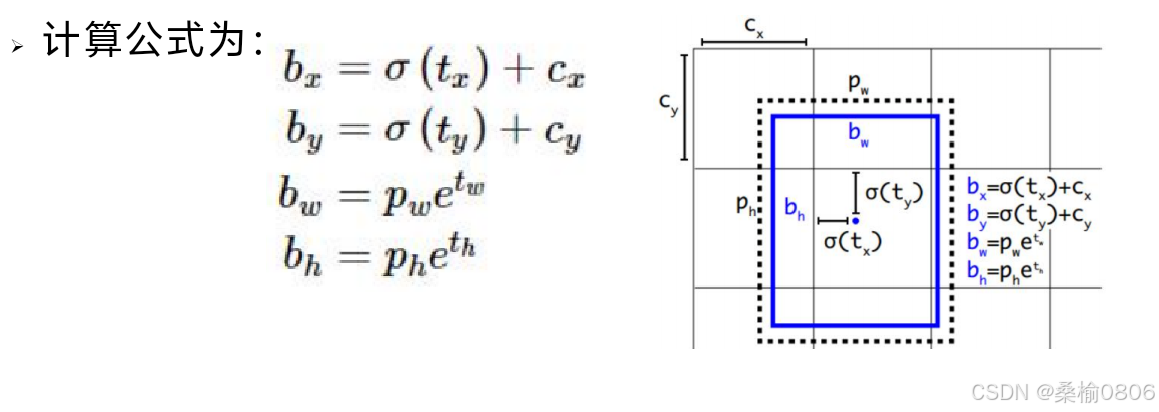
·YOLO-V2 - Direct Location Prediction
- bbox=(x,y,w,h),(x,y)为(wp,hp),则:
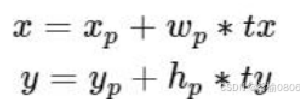
- 这样会导致在x轴方向,模型不稳定,尤其是刚开始训练的时候
- V2中并没有直接使用偏移量,而是选择相对grid cell的偏移量
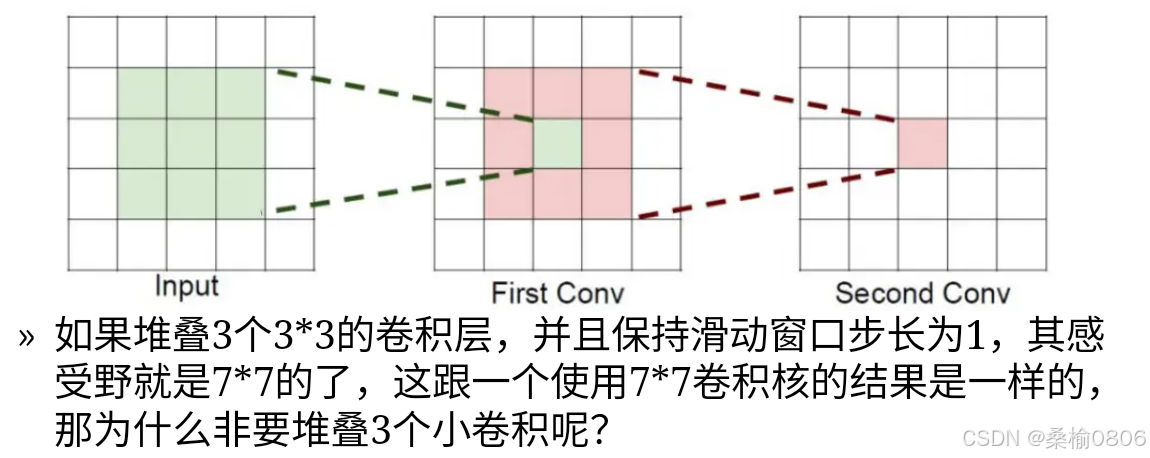
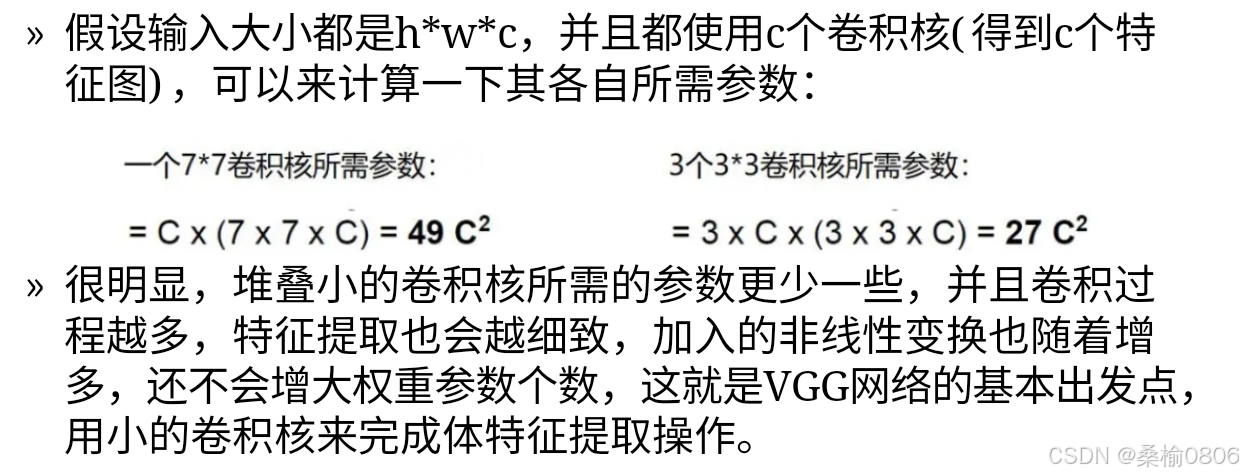
·感受野:概述来说就是特征图上的点能看到原始图像多大区域
·感受野
·YOLO-V2 - Fine - grained Features
- 最后一层时感受到太大了,小目标可能丢失了,需融合之前的特征。
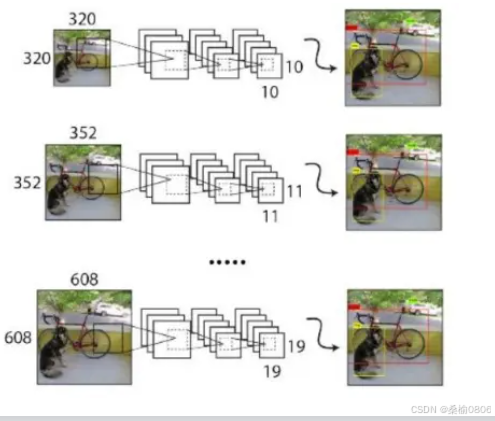
·YOLO-V2 - Multi - scale
- 都是卷积操作可没人能限制我了!一定iterations之后改变输入图像大小
- 最小的图像尺寸为320 x 320,最大的图像尺寸为608 x 608。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









