



一、为什么要读这篇文章?
-
系统性:一次性梳理 YOLOv1~YOLOv13 的演进脉络
-
实战性:提供可直接跑的 PyTorch 训练 / 推理 / 部署代码
-
易读性:用中文讲人话,附大量示意图 & 代码注释
-
前瞻性:给出 2025 年之后的可研究方向与踩坑提示
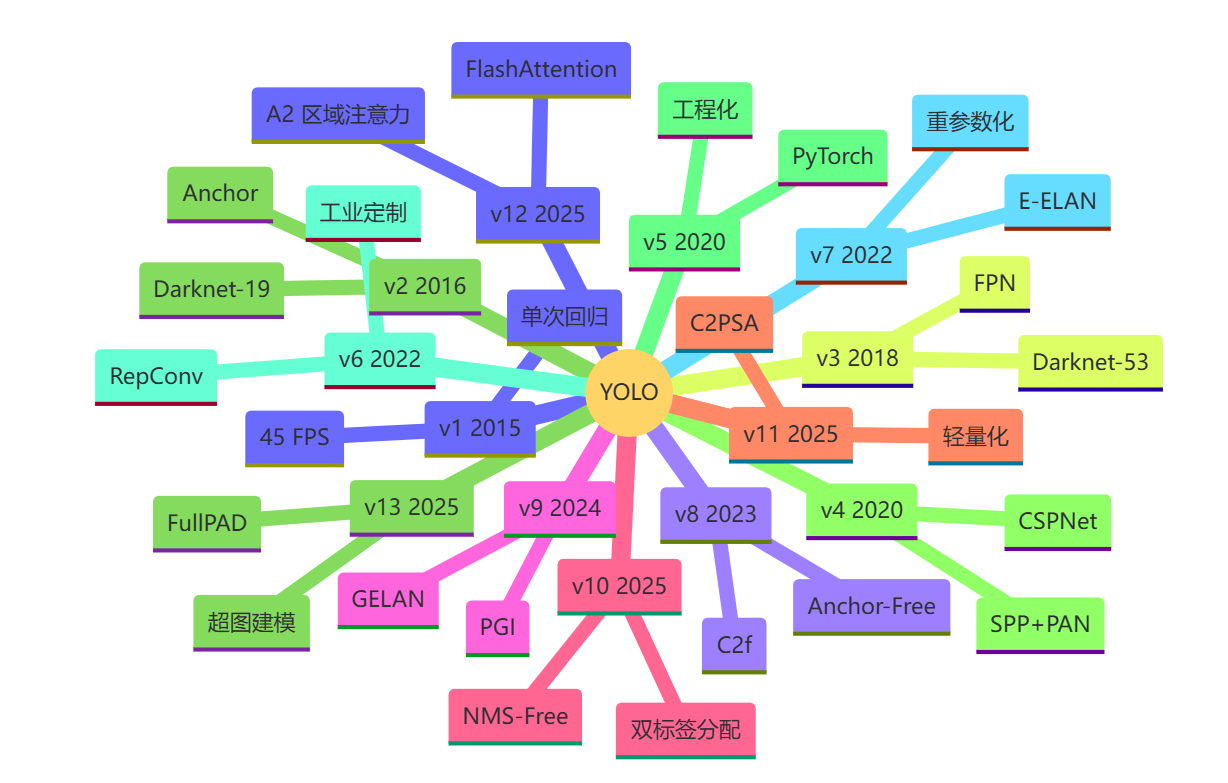
二、YOLO 家族十年速览(1 张脑图)
三、YOLO 通用技术骨架
| 模块 | 作用 | YOLO 各版本演进要点 |
|---|---|---|
| Backbone | 特征提取 | DarkNet → CSPDarkNet → GELAN → RepVGG |
| Neck | 多尺度融合 | FPN → PANet → BiFPN → RepFPN |
| Head | 检测输出 | YOLO Head → Decoupled Head → Anchor-Free |
| Label Assignment | 正负样本匹配 | IoU → ATSS → Task-Aligned → TAL |
| Loss | 优化目标 | MSE → GIoU → CIoU → DFL |


四、YOLOv8 原理精讲(以最新稳定版为例)
选择 YOLOv8 而非 v13 的原因:
官方 PyTorch 代码最完善;2) 2025 年工业落地最成熟;3) 与 v13 思想相通,可平滑升级。
4.1 网络结构
Input
│
Backbone (CSPDarkNet-P5)
│(3 scales)
Neck (PANet-FPN)
│
Head (Decoupled, Anchor-Free)
│
Output (cls+reg+DFL)-
Anchor-Free:直接预测 bbox 中心点到四条边的距离,无需预设 anchor。
-
DFL(Distribution Focal Loss):将 bbox 回归离散化成分布,缓解边界不连续问题。
4.2 关键代码片段(ultralytics 8.2.0)
from ultralytics import YOLO
# 1. 训练
model = YOLO("yolov8n.yaml") # 构建网络
model.train(data="coco128.yaml",
epochs=100,
imgsz=640,
batch=64,
device="0,1")
# 2. 验证
metrics = model.val()
print(metrics.box.map) # mAP@0.5:0.95
# 3. 推理
results = model("bus.jpg")
results[0].show() # 可视化五、从零手写最小可运行 PyTorch YOLO(教学版)
目标:100 行代码实现 YOLOv1-tiny(仅支持单类,方便理解)
5.1 依赖
pip install torch torchvision opencv-python5.2 网络定义(yolo_tiny.py)
import torch
import torch.nn as nn
class TinyYOLO(nn.Module):
def __init__(self, S=7, B=2, C=1):
super().__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 16, 3, 1, 1), nn.BatchNorm2d(16), nn.LeakyReLU(0.1),
nn.MaxPool2d(2),
nn.Conv2d(16, 32, 3, 1, 1), nn.BatchNorm2d(32), nn.LeakyReLU(0.1),
nn.MaxPool2d(2),
nn.Conv2d(32, 64, 3, 1, 1), nn.BatchNorm2d(64), nn.LeakyReLU(0.1),
nn.AdaptiveAvgPool2d((S, S))
)
self.head = nn.Conv2d(64, B*5 + C, 1)
def forward(self, x):
x = self.features(x)
return self.head(x).permute(0, 2, 3, 1) # (B,S,S,11)5.3 损失函数(简化版)
def yolo_loss(pred, target, l_coord=5, l_noobj=0.5):
# pred: (B,S,S,11) [cx,cy,w,h,conf]*2 + cls
# target: (B,S,S,6) [cx,cy,w,h,conf,cls]
...
return loss5.4 训练脚本(train_tiny.py)
from yolo_tiny import TinyYOLO
from dataset import VOCDataset # 自定义
model = TinyYOLO()
optimizer = torch.optim.Adam(model.parameters(), 1e-4)
for epoch in range(10):
for imgs, targets in dataloader:
preds = model(imgs)
loss = yolo_loss(preds, targets)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(f"epoch {epoch} loss={loss.item():.4f}")六、工业级部署:从 PyTorch → ONNX → TensorRT
以 YOLOv8 为例,完整脚本见 GitHub Gist。
# 1. 导出 ONNX
yolo export model=yolov8n.pt format=onnx opset=12
# 2. ONNX → TensorRT(FP16)
trtexec --onnx=yolov8n.onnx --saveEngine=yolov8n.engine --fp16
# 3. Python 推理
import tensorrt as trt
import pycuda.driver as cuda
...| 环境 | RTX 4090 实测 FPS | 备注 |
|---|---|---|
| PyTorch FP32 | 120 | batch=1 |
| TensorRT FP16 | 420 | NMS 内置 |
| TensorRT INT8 | 580 | 需 PTQ 校准 |
七、2025 之后:YOLO 还能卷什么?
| 方向 | 关键词 | 可参考论文 |
|---|---|---|
| 多模态 | RGB+Depth+LiDAR | RoboFusion 2025 |
| 3D YOLO | 单目深度估计 | YOLO-3D 2024 |
| 自监督 | Masked AutoEncoder | YOLO-MAE 2025 |
| 动态稀疏 | 输入自适应路径 | AdaYOLO 2025 |
| 大模型蒸馏 | SAM → YOLO | SAM-YOLO 2025 |
九、结语
YOLO 用十年时间把“实时目标检测”做到了极致,但 “检测”只是计算机视觉的起点。
希望本文能帮你在算法与工程之间架起一座桥,少走弯路,多挖深坑。

















 11万+
11万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









