







SSD 的网络结构如图1所示, 包含基础VGG结构、深度卷积层、边框特征提取网络、PriorBox 生成机制四部分;
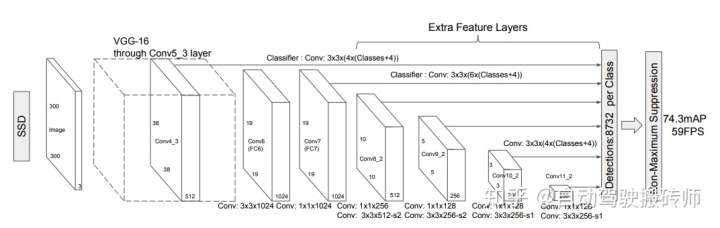
图1 SSD网络结构
1.1 基础VGG结构
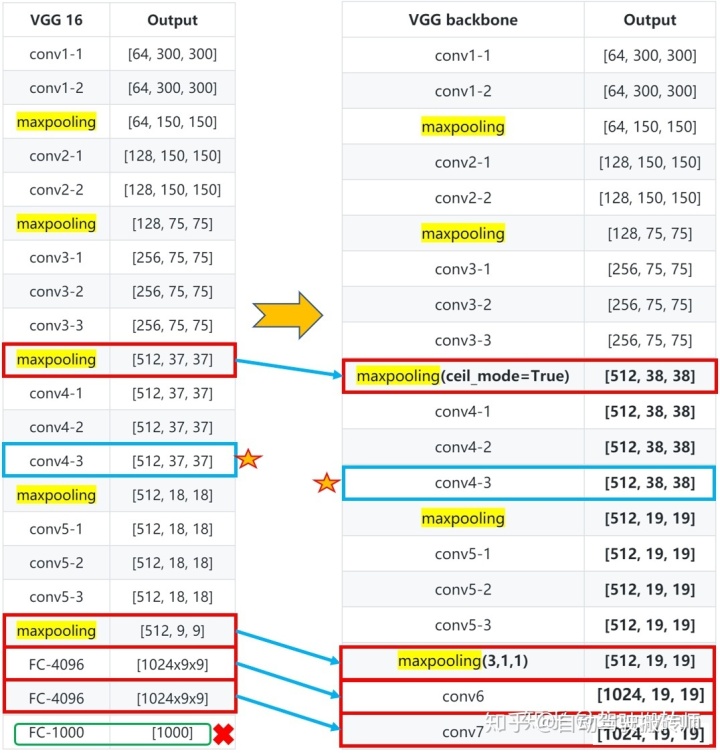
图2 骨干网络与原始VGG16对比图
从图2最中我们可以清晰的看到在以VGG16做骨干网络时,在 conv5后丢弃了VGG16中的全连接层改为了1024×3×3和1024×1×1的卷积层。其中 conv4-1卷积层前面的 maxpooling层的 ceil_model=True,使得输出特征图长宽为 38 × 38。还有 conv5-3 后面的一层 maxpooling 层参数为(kernelsize=3,stride=1,padding=1),不进行下采样。然后在 fc7后面接上多尺度提取的另外 4 个卷积层就构成了完整的 SSD 网络。这里 VGG16 修改后的代码如下,来自 ssd.py:
# This function is derived from torchvision VGG make_layers()
# https://github.com/pytorch/vision/blob/master/torchvision/models/vgg.py
def vgg(cfg, i, batch_norm=False):
layers  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









