






fz = k * sin( hd * i ) + k;
tem = ( u16 )fz ;
printf("%d\r\n",tem);
sinData[i] = tem;
}
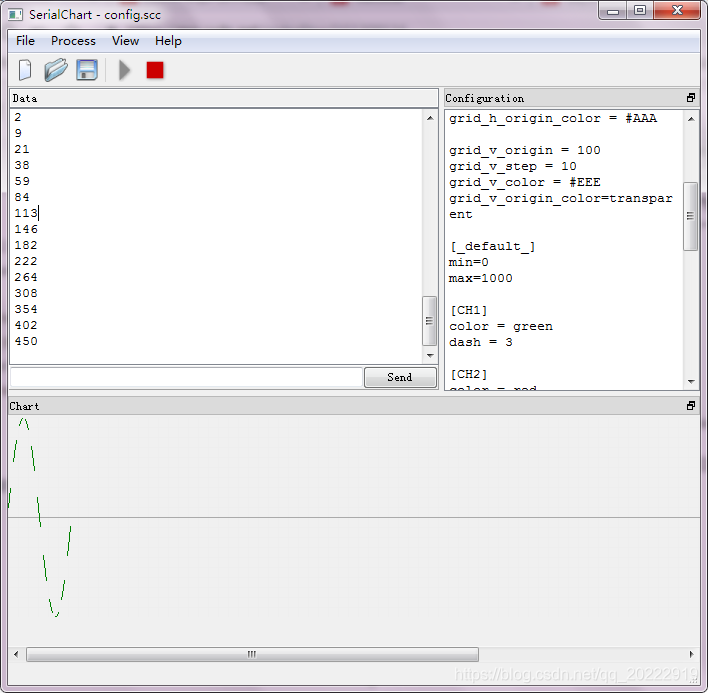
通过串口波形软件可以看到生成的数据和波形如下:
数据生成好之后,下来设置定时器输出PWM,
void TIM1_PWM_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //复用时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //只有高级定时器需要设置,其他定时器可以不设置。
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //TIM1_OC1
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_Cmd(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE); //高级定时器才有 必须打开
}
设置定时器1输出PWM波,定时器初始化为:
定时器 TIM1_PWM_Init(1000 - 1, 3);
定时器1输出18K的PWM波,此时输出的PWM波占空比是固定的,还不能随着正弦规律变化。下来利用定时器2的定时中断,在中断中改变PWM的占空比。
//APB1时钟分频为2 TIM2-7 时钟数为APB1 2倍
// Tout= (arr+1)*(psc+1) / Tclk
void TIM2_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //只有高级定时器需要设置,其他定时器可以不设置。
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);
}
u8 dc_cnt = 0; //占空比计数
//定时器2中断中改变 定时器1的占空比值
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
TIM_SetCompare1(TIM1, sinData[dc_cnt]);
dc_cnt++;
if(dc_cnt >= PointMax)
dc_cnt = 0;
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
在定时器2中断中,依次将sinData数组中存放的正弦数据做为PWM的占空比值。由于生成的正弦数据最大值是1000,输出PWM的ARR值也是1000,那么生成的正弦值就可以直接做为占空比用。如果生成的正弦波数据和ARR值不一样,在此处需要一个转换,用比例系数调整正弦波中的最大值刚好是占空比最大值就行。
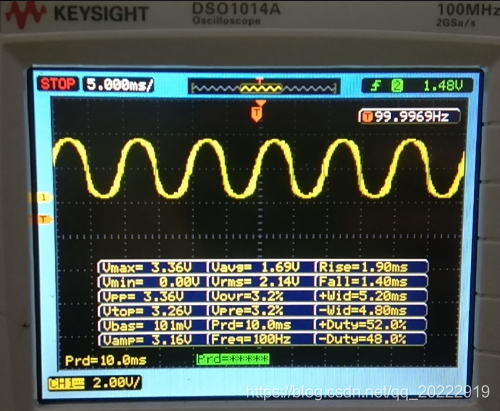
这样在定时器1输出PWM比的时候,在定时器2中断中调整PWM的占空比,这样输出的PWM波经过外部电容后,就是一个正弦波。在PA8引脚接105电容。生成的波形如下:
生成了正弦波之后,初步目的算是达到了。那么如何用生成的正弦波,和外部市电波形同步呢。
可以用过零检测电路将外部波形测出来。在每个零过点的时候输出一个脉冲。然后用中断检测这个脉冲,每次过零点到来时,在中断中将正弦波数组下标设置为0,这样每个过零点时,输出的正弦波也从0点开始输出。
外部中断代码如下:
void IO_Exti_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
extern u8 dc_cnt; //占空比计数
//10ms中断一次
void EXTI0_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line0) != RESET)
{
dc_cnt = 0;
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
在外部中断中将正弦波数组的下标控制值dc\_cnt 清零,这样每个过零点时,输出的正弦波数据正好是第一个。
这样输出的SPWM波就可以通过中断和外部波形进行同步了。

通过波形可以看出,在过零点位置,输出正弦波也刚好在零点。
如果要调整输出正弦波数据的初始位置怎么办呢?只需要在生成正弦波数据时,设置初始位置就行。
void get_sin_tab1( u16 point, u16 maxnum )
{
u16 i = 0, j = 0, k = 0;
float hd = 0.0; //弧度
float fz = 0.0; //峰值
u16 tem = 0;
j = point / 2; //水平线位置 单片机没有负电压 水平线为点值数量的一半
hd = PI / j; // π/2 内每一个点对应的弧度值
k = maxnum / 2; //最大值一半
for( i = 0; i < point; i++ )
{
fz = k * sin( hd * i ) + k; //起点为中间值
//fz = k * sin( hd * i + PI / 2) + k; //起点位置偏移到 π/2 起点为最大值

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









