







一、 torch.nn中Pool layers的介绍
官网链接:
1. nn.MaxPool2d介绍
nn.MaxPool2d是在进行图像处理时,Pool layers最常用的函数
(1)torch.nn.MaxPool2d类
class torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
(2)参数介绍
-
kernel_size(int or tuple): 用于设置一个取最大值的窗口,如设置为3,那么会生成一个3×3的窗口
-
stride(int or tuple): 默认值为kernel_size,步幅,和卷积层中的stride一样
-
padding(int or tuple): 填充图像,默认填充的值为0
-
dilation(int): 空洞卷积,即卷积核之间的距离。如卷积核的尺寸为3×3,dilation为1,那么返回一个大小为5×5的卷积核,卷积核每个元素与上下左右的元素之间空一格
-
return_indices(bool): 一般用的很少,不做介绍
-
ceil_mode(bool): 默认为False。为True时,输出的shape使用_ceil_格式(向上取整,即进一);为False时,输出的shape使用_floor_格式(向下取整)。
二、最大池化操作
1. 最大池化操作举例(理论介绍)
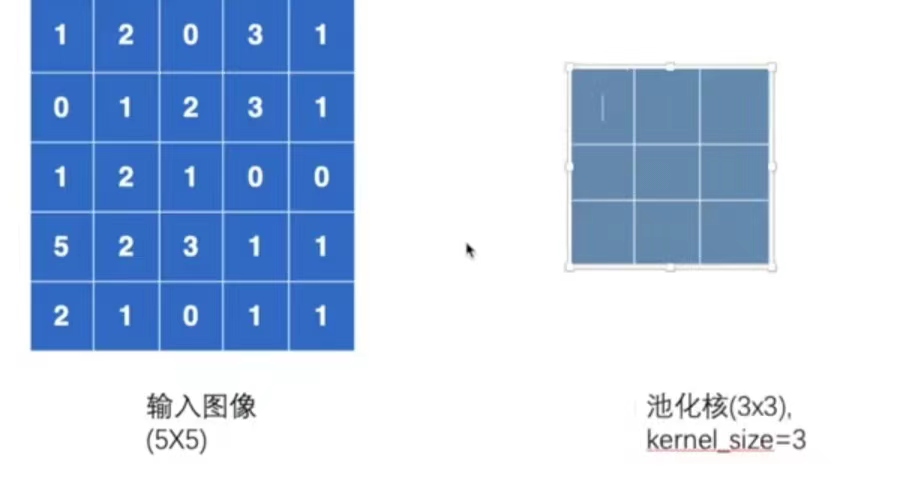
假设有一个5×5的图像和一个3×3的池化核(kenel_size=3),如下图。池化过程就是将池化核与图像进行匹配。下面介绍最大池化的具体操作。
-
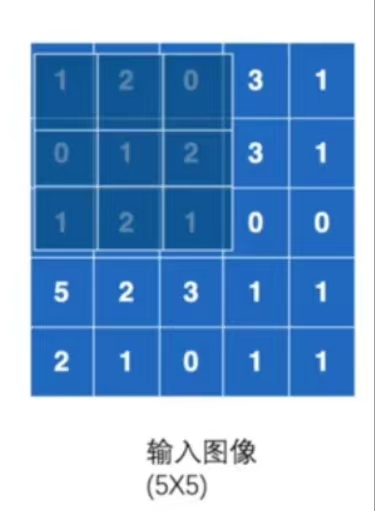
首先用池化核覆盖图像,如下图。然后取到最大值,作为一个输出。
-
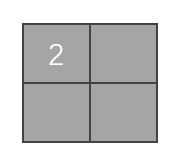
上图为第一次最大池化操作,最大值为2。将2作为一个输出,如下图。
-
由于本例未对stride进行设置,故stride采取默认值,即_stride=kernel_size=3_,池化核移动如下图(移动方式与上上文中提到的卷积核移动方式相同,不再赘述)。由于池化核移动已超出范围,要不要取这3×2部分的最大值,取决于call_mode的值,若_ceil_mode=True_,则取最大值,即输出3;若_ceil_mode=False_,则不取这部分的值,即这一步不进行池化操作。

-
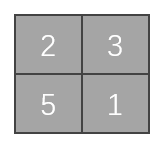
假设_ceil_mode=True_,经过最大池化操作后,输出的结果如下图。
-
假设_ceil_mode=False_,经过最大池化操作后,输出的结果如下图。

-
2. 操作前后的图像大小计算公式
跟卷积操作的计算公式
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









