









网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
maxTraceLength : 200
});
// Add navigation goal
var navGoal = new ROS2D.NavGoal({
ros : ros,
rootObject : viewer.scene,
actionTopic : ‘/move_base’
});
// Scale the canvas to fit to the map
gridClient.on(‘change’, function() {
viewer.scaleToDimensions(gridClient.currentGrid.width, gridClient.currentGrid.height);
viewer.shift(gridClient.currentGrid.pose.position.x, gridClient.currentGrid.pose.position.y);
// plannedPath.initScale();
// robotTrace.initScale();
// navGoal.initScale();
registerMouseHandlers();
});
function registerMouseHandlers() {
// Setup mouse event handlers
var mouseDown = false;
var zoomKey = false;
var panKey = false;
var startPos = new ROSLIB.Vector3();
viewer.scene.addEventListener(‘stagemousedown’, function(event) {
if (event.nativeEvent.ctrlKey === true) {
zoomKey = true;
zoomView.startZoom(event.stageX, event.stageY);
}
else if (event.nativeEvent.shiftKey === true) {
panKey = true;
panView.startPan(event.stageX, event.stageY);
}
else {
var pos = viewer.scene.globalToRos(event.stageX, event.stageY);
navGoal.startGoalSelection(pos);
}
startPos.x = event.stageX;
startPos.y = event.stageY;
mouseDown = true;
});
viewer.scene.addEventListener(‘stagemousemove’, function(event) {
if (mouseDown === true) {
if (zoomKey === true) {
var dy = event.stageY - startPos.y;
var zoom = 1 + 10*Math.abs(dy) / viewer.scene.canvas.clientHeight;
if (dy < 0)
zoom = 1 / zoom;
zoomView.zoom(zoom);
}
else if (panKey === true) {
panView.pan(event.stageX, event.stageY);
}
else {
var pos = viewer.scene.globalToRos(event.stageX, event.stageY);
navGoal.orientGoalSelection(pos);
}
}
});
viewer.scene.addEventListener(‘stagemouseup’, function(event) {
if (mouseDown === true) {
if (zoomKey === true) {
zoomKey = false;
}
else if (panKey === true) {
panKey = false;
}
else {
var pos = viewer.scene.globalToRos(event.stageX, event.stageY);
var goalPose = navGoal.endGoalSelection(pos);
navGoal.sendGoal(goalPose);
}
mouseDown = false;
}
});
}
}
Simple Map Example
Run the following commands in the terminal then refresh this page. This will load a map from the ros-groovy-rail-maps package.
- roscore
- rosrun map_server map_server /opt/ros/groovy/share/rail_maps/maps/ilab.pgm 0.05
- roslaunch rosbridge_server rosbridge_websocket.launch
- rosrun robot_pose_publisher robot_pose_publisher
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
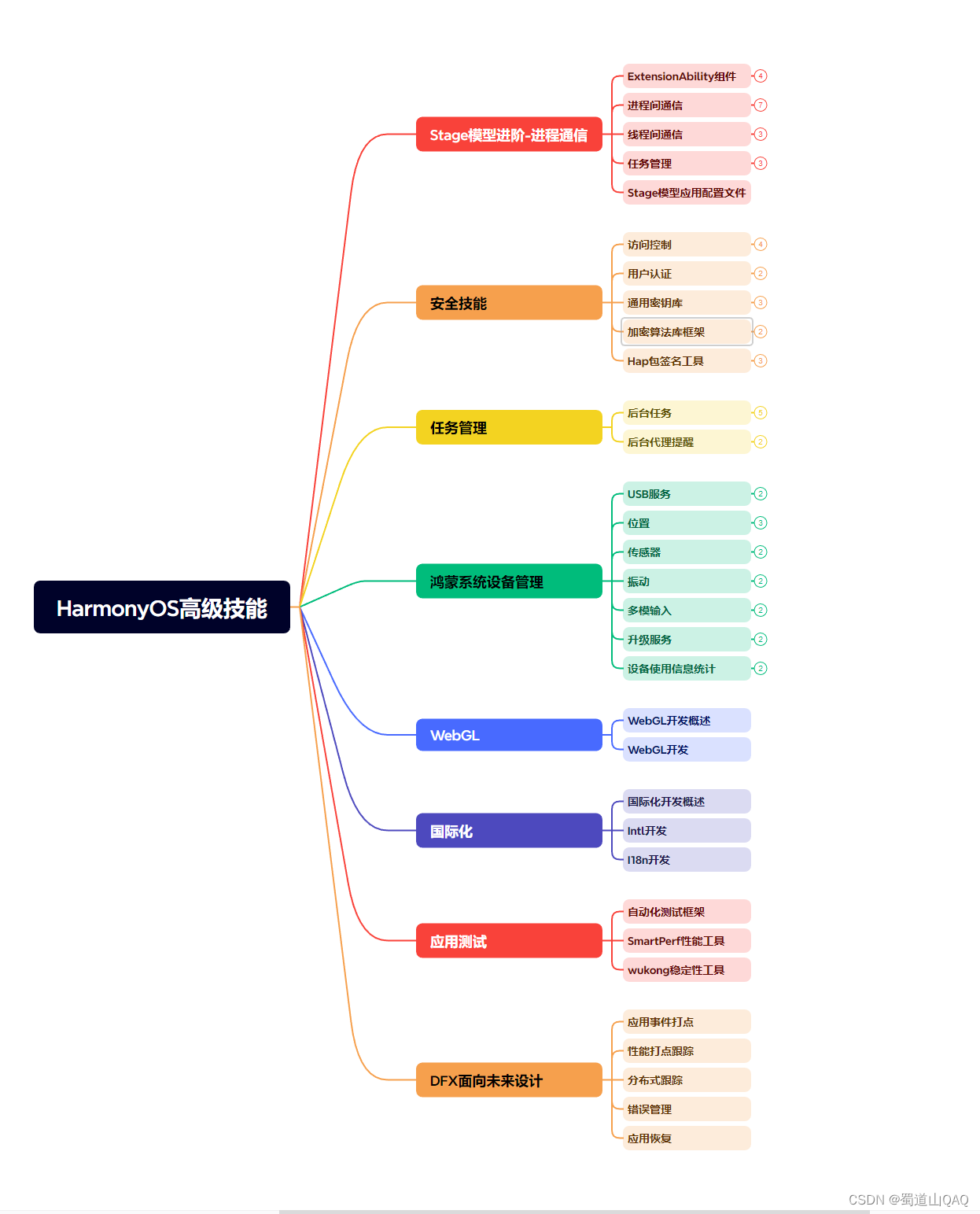


既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上鸿蒙开发知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新*


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









