



由于很多时候拿到的硬件没有适配ros2的功能包,一般只有基础cdk,就需要我们自己构建功能包。
以下是构建3d激光雷达功能包记录
以HPS3D160面阵雷达为例
接受雷达数据发布点晕
一、功能包目录结构示例
lidar_3d_driver/ # 功能包根目录
├── include/ # 头文件目录
│ └── lidar_3d_driver/ # 包含包内头文件的子目录(命名空间)
│ ├── lidar_driver.hpp # 你的驱动头文件
│ └── sdk_header.h # SDK头文件(可软链或复制)
├── lib/ # 第三方动态库目录
│ └── libHPS3DSDK64.so # 第三方SDK动态库
├── src/ # 源代码目录
│ └── lidar_node.cpp # 节点实现代码
├── CMakeLists.txt # 构建配置文件
└── package.xml # 包描述文件
二、功能包构建思路
| 步骤 | 说明 |
|---|---|
| 1. 头文件管理 | 把自己写的头文件放include/lidar_3d_driver/,SDK头文件放include/或软链 |
| 2. 动态库管理 | 把第三方.so库放lib/目录,方便统一管理 |
| 3. CMake配置 | - 添加include_directories包含头文件路径<br>- 添加link_directories包含库路径<br>- 在target_link_libraries链接SDK库<br>- 设置rpath保证运行时能找到库 |
| 4. package.xml依赖 | 声明ROS2依赖包,方便自动安装和查找 |
| 5. 编写节点代码 | 包含SDK头文件,调用SDK接口,实现数据采集和ROS消息发布 |
| 6. 编译和运行 | 使用colcon build编译,运行时设置LD_LIBRARY_PATH或依赖rpath |
三、具体操作
1、假设包名为lidar_3d_driver,并指定依赖:
ros2 pkg create --build-type ament_cmake lidar_3d_driver --dependencies rclcpp sensor_msgs pcl_conversions pcl_ros tf2_ros geometry_msgs
2、进入功能包下创建必要目录:
mkdir -p include/lidar_3d_driver
mkdir lib
mkdir src
3、把SDK的.so文件复制到lib/目录
要选择对应的.so
4、创建头文件目录
mkdir -p ~/ros2_ws/src/lidar_3d_driver/include/lidar_3d_driver
如果你有自己写的头文件,比如 lidar_driver.hpp
或者第三方SDK的头文件都放到里面并确保 CMakeLists.txt 中包含头文件路径
include_directories(
include
${CMAKE_CURRENT_SOURCE_DIR}/include
)
5、编写节点代码:
具体根据提供的sdk函数调用写
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/point_cloud2.hpp"
#include "lidar_3d_driver/HPS3DSDK.h" // SDK头文件路径根据实际调整
class Lidar3DNode : public rclcpp::Node
{
public:
Lidar3DNode() : Node("lidar_3d_node")
{
pc_pub_ = this->create_publisher<sensor_msgs::msg::PointCloud2>("points_raw", 10);
// TODO: 初始化SDK,采集点云并发布
}
private:
rclcpp::Publisher<sensor_msgs::msg::PointCloud2>::SharedPtr pc_pub_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = std::make_shared<Lidar3DNode>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
6、修改 CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(lidar_3d_driver)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(pcl_conversions REQUIRED)
find_package(pcl_ros REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(geometry_msgs REQUIRED)
include_directories(
include
${CMAKE_CURRENT_SOURCE_DIR}/include
)
link_directories(${CMAKE_CURRENT_SOURCE_DIR}/lib)
add_executable(lidar_3d_node src/lidar_node.cpp)
ament_target_dependencies(lidar_3d_node
rclcpp
sensor_msgs
pcl_conversions
pcl_ros
tf2_ros
geometry_msgs
)
target_link_libraries(lidar_3d_node
HPS3DSDK64 # 这里写你的SDK库名,去掉lib和.so
)
set(CMAKE_INSTALL_RPATH_USE_LINK_PATH TRUE)
set(CMAKE_INSTALL_RPATH "${CMAKE_CURRENT_SOURCE_DIR}/lib")
install(TARGETS lidar_3d_node
DESTINATION lib/${PROJECT_NAME}
)
ament_package()
7、修改 package.xml
<package format="3">
<name>lidar_3d_driver</name>
<version>0.0.1</version>
<description>3D LiDAR driver with SDK integration</description>
<maintainer email="your_email@example.com">Your Name</maintainer>
<license>Apache-2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>sensor_msgs</depend>
<depend>pcl_conversions</depend>
<depend>pcl_ros</depend>
<depend>tf2_ros</depend>
<depend>geometry_msgs</depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
四、问题解决
1、找不到iso文件
dayang@dayang-virtual-machine:~/ros2_ws$ ros2 run hps3d_driver hps3d_node
/home/dayang/ros2_ws/install/hps3d_driver/lib/hps3d_driver/hps3d_node: error while loading shared libraries: libHPS3DSDK64_1-8-5.so: cannot open shared object file: No such file or directory
[ros2run]: Process exited with failure 127
这个是因为系统找不到你的iso文件
需要更新环境
export LD_LIBRARY_PATH=~/ros2_ws/src/lidar_3d_driver/lib:$LD_LIBRARY_PATH
ros2 run lidar_3d_driver lidar_3d_node
根据自己目录修改
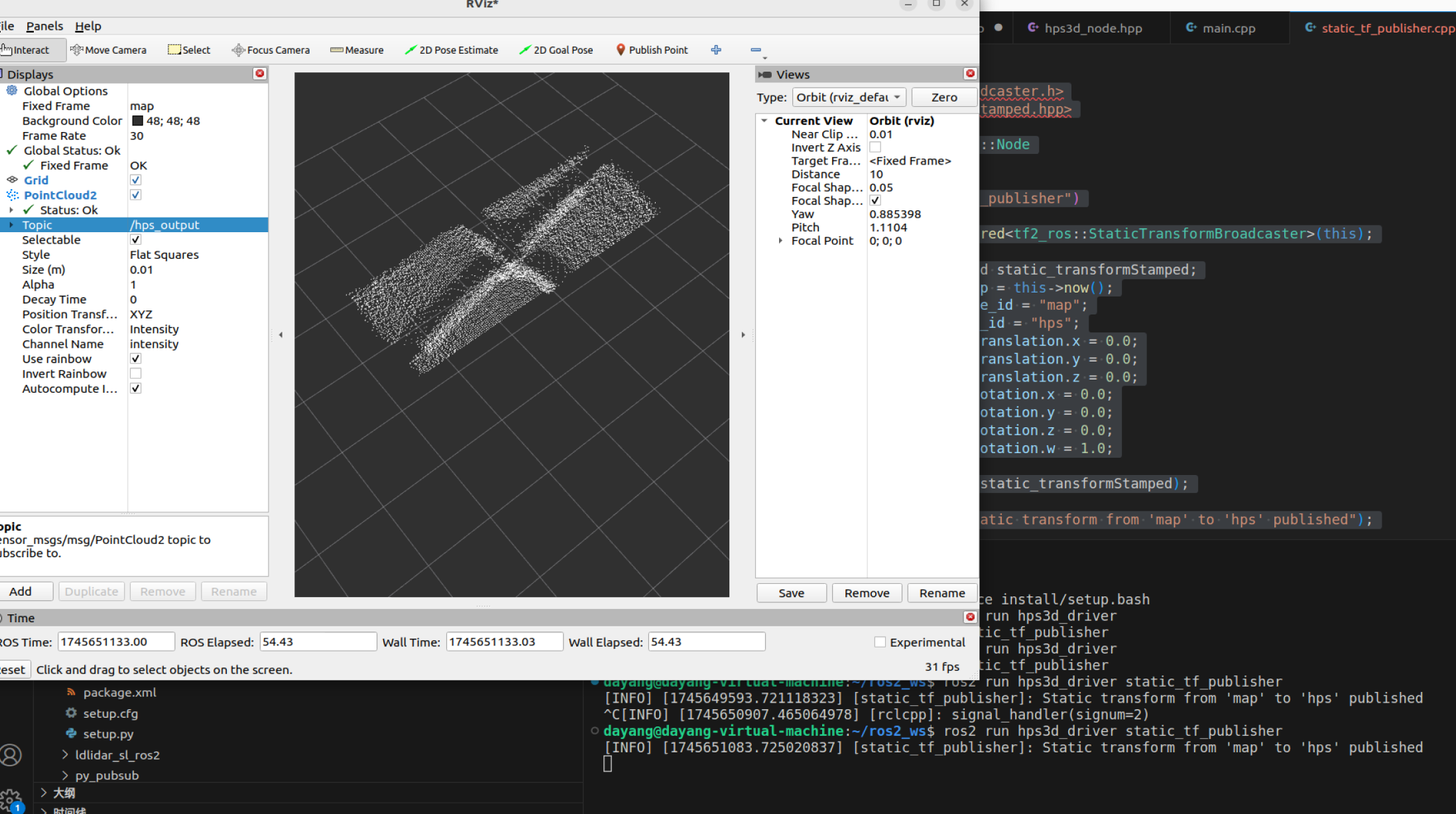
2、rviz里面接收点云数据full
reason 'discarding message because the queue is full'
[INFO] [1745650955.306614335] [rviz]: Message Filter dropping message: frame 'hps' at time 1745650954.620 for reason 'discarding message because the queue is full'
[INFO] [1745650955.370374514] [rviz]: Message Filter dropping message: frame 'hps' at time 1745650954.685 for reason 'discarding message because the queue is full'
[INFO] [1745650955.435076656] [rviz]: Message Filter dropping message: frame 'hps' at time 1745650954.753 for reason 'discarding message because the queue is full'
[INFO] [1745650955.499252808] [rviz]: Message Filter dropping message: frame 'hps' at time 1745650954.820 for reason 'discarding message because the queue is full'
^C[INFO] [1745650955.555744098] [rclcpp]: signal_handler(signum=2)
这是因为没有点云数据和map数据的tf转化,导致rviz放弃数据
解决方法使用静态发布节点发布map到hps的tf
#include <rclcpp/rclcpp.hpp>
#include <tf2_ros/static_transform_broadcaster.h>
#include <geometry_msgs/msg/transform_stamped.hpp>
class StaticTfPublisher : public rclcpp::Node
{
public:
StaticTfPublisher() : Node("static_tf_publisher")
{
static_broadcaster_ = std::make_shared<tf2_ros::StaticTransformBroadcaster>(this);
geometry_msgs::msg::TransformStamped static_transformStamped;
static_transformStamped.header.stamp = this->now();
static_transformStamped.header.frame_id = "map";
static_transformStamped.child_frame_id = "hps";
static_transformStamped.transform.translation.x = 0.0;
static_transformStamped.transform.translation.y = 0.0;
static_transformStamped.transform.translation.z = 0.0;
static_transformStamped.transform.rotation.x = 0.0;
static_transformStamped.transform.rotation.y = 0.0;
static_transformStamped.transform.rotation.z = 0.0;
static_transformStamped.transform.rotation.w = 1.0;
static_broadcaster_->sendTransform(static_transformStamped);
RCLCPP_INFO(this->get_logger(), "Static transform from 'map' to 'hps' published");
}
private:
std::shared_ptr<tf2_ros::StaticTransformBroadcaster> static_broadcaster_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
auto node = std::make_shared<StaticTfPublisher>();
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
成功解决问题;
五、代码参考
#include "hps3d_driver/hps3d_node.hpp"
#include <sensor_msgs/point_cloud2_iterator.hpp>
#include <geometry_msgs/msg/transform_stamped.hpp>
#include <stdexcept>
#include <sstream>
#include <iomanip>
#include <signal.h>
#include <chrono>
#include <thread>
HPS3DNode::HPS3DNode() : Node("hps3d_node"), device_handle_(-1)
{
pc_pub_ = this->create_publisher<sensor_msgs::msg::PointCloud2>("hps_output", 10);
if (HPS3D_MeasureDataInit(&measure_data_) != HPS3D_RET_OK) {
RCLCPP_ERROR(this->get_logger(), "Failed to initialize measure data");
throw std::runtime_error("MeasureDataInit failed");
}
connectDevice();
static_broadcaster_ = std::make_shared<tf2_ros::StaticTransformBroadcaster>(this);
// 发布 map -> map 的静态变换,保证 map 坐标系存在
geometry_msgs::msg::TransformStamped map_transform;
map_transform.header.stamp = this->now();
map_transform.header.frame_id = "map";
map_transform.child_frame_id = "map";
map_transform.transform.translation.x = 0.0;
map_transform.transform.translation.y = 0.0;
map_transform.transform.translation.z = 0.0;
map_transform.transform.rotation.x = 0.0;
map_transform.transform.rotation.y = 0.0;
map_transform.transform.rotation.z = 0.0;
map_transform.transform.rotation.w = 1.0;
static_broadcaster_->sendTransform(map_transform);
// 你已有的 map -> hps 静态变换
geometry_msgs::msg::TransformStamped static_transformStamped;
static_transformStamped.header.stamp = this->now();
static_transformStamped.header.frame_id = "map";
static_transformStamped.child_frame_id = "hps";
static_transformStamped.transform.translation.x = 0.0;
static_transformStamped.transform.translation.y = 0.0;
static_transformStamped.transform.translation.z = 0.0;
static_transformStamped.transform.rotation.x = 0.0;
static_transformStamped.transform.rotation.y = 0.0;
static_transformStamped.transform.rotation.z = 0.0;
static_transformStamped.transform.rotation.w = 1.0;
static_broadcaster_->sendTransform(static_transformStamped);
// 注册事件回调
HPS3D_RegisterEventCallback(&HPS3DNode::eventCallbackStatic, this);
// 启动采集
int ret = HPS3D_StartCapture(device_handle_);
if (ret != HPS3D_RET_OK) {
RCLCPP_ERROR(this->get_logger(), "StartCapture failed with code %d", ret);
throw std::runtime_error("StartCapture failed");
}
RCLCPP_INFO(this->get_logger(), "Device connected and capturing");
// 注册信号处理,优雅退出
signal(SIGINT, [](int) {
RCLCPP_INFO(rclcpp::get_logger("hps3d_node"), "SIGINT received, shutting down...");
rclcpp::shutdown();
});
}
HPS3DNode::~HPS3DNode()
{
onShutdown();
}
void HPS3DNode::connectDevice()
{
std::string ip = "192.168.0.10"; // 修改为你的设备IP
uint16_t port = 12345; // 修改为你的设备端口
int ret = HPS3D_EthernetConnectDevice(const_cast<char*>(ip.c_str()), port, &device_handle_);
if (ret != HPS3D_RET_OK) {
RCLCPP_ERROR(this->get_logger(), "Failed to connect device, ret=%d", ret);
throw std::runtime_error("Device connect failed");
}
RCLCPP_INFO(this->get_logger(), "Device connected, handle=%d", device_handle_);
}
void HPS3DNode::disconnectDevice()
{
if (device_handle_ >= 0) {
HPS3D_CloseDevice(device_handle_);
device_handle_ = -1;
RCLCPP_INFO(this->get_logger(), "Device disconnected");
}
}
void HPS3DNode::onShutdown()
{
HPS3D_StopCapture(device_handle_);
HPS3D_UnregisterEventCallback();
HPS3D_MeasureDataFree(&measure_data_);
disconnectDevice();
}
void HPS3DNode::eventCallbackStatic(int handle, int eventType, uint8_t* data, int dataLen, void* userPara)
{
auto node = static_cast<HPS3DNode*>(userPara);
node->eventCallback(handle, eventType, data, dataLen);
}
void HPS3DNode::eventCallback(int handle, int eventType, uint8_t* data, int dataLen)
{
static int count = 0;
count++;
if (count % 3 != 0) // 每3帧发布一次
return;
(void)handle;
(void)dataLen;
switch ((HPS3D_EventType_t)eventType)
{
case HPS3D_SIMPLE_ROI_EVEN:
case HPS3D_FULL_ROI_EVEN:
case HPS3D_FULL_DEPTH_EVEN:
case HPS3D_SIMPLE_DEPTH_EVEN:
{
if (HPS3D_ConvertToMeasureData(data, &measure_data_, (HPS3D_EventType_t)eventType) <= 0) {
RCLCPP_WARN(this->get_logger(), "Failed to convert measure data");
return;
}
sensor_msgs::msg::PointCloud2 pc_msg;
convertToPointCloud2(measure_data_, pc_msg);
pc_pub_->publish(pc_msg);
break;
}
case HPS3D_SYS_EXCEPTION_EVEN:
{
RCLCPP_ERROR(this->get_logger(), "System exception event received");
break;
}
case HPS3D_DISCONNECT_EVEN:
{
RCLCPP_WARN(this->get_logger(), "Device disconnected");
disconnectDevice();
break;
}
case HPS3D_NULL_EVEN:
default:
// Ignore other events
break;
}
}
void HPS3DNode::convertToPointCloud2(const HPS3D_MeasureData_t& measure_data, sensor_msgs::msg::PointCloud2& pc_msg)
{
const auto& cloud = measure_data.full_depth_data.point_cloud_data;
pc_msg.header.stamp = this->now();
pc_msg.header.frame_id = "hps";
pc_msg.height = cloud.height;
pc_msg.width = cloud.width;
pc_msg.is_dense = false;
pc_msg.is_bigendian = false;
sensor_msgs::PointCloud2Modifier modifier(pc_msg);
modifier.setPointCloud2FieldsByString(1, "xyz");
modifier.resize(pc_msg.width * pc_msg.height);
sensor_msgs::PointCloud2Iterator<float> iter_x(pc_msg, "x");
sensor_msgs::PointCloud2Iterator<float> iter_y(pc_msg, "y");
sensor_msgs::PointCloud2Iterator<float> iter_z(pc_msg, "z");
for (size_t i = 0; i < cloud.points; ++i, ++iter_x, ++iter_y, ++iter_z) {
*iter_x = cloud.point_data[i].x / 1000.0f; // mm to meters
*iter_y = cloud.point_data[i].y / 1000.0f;
*iter_z = cloud.point_data[i].z / 1000.0f;
}
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









