









1.为什么要有二叉平衡树
由上一节笔记,我们学习了二叉排序树,知道了他的缺点,当二叉排序树是一棵斜树的时候,插⼊和删除操作的时间复杂度将可能变为O(n)。⼆叉搜索树的查找效率取决于树的高度,因此保持树的⾼度最⼩,即可保证树的查找效率。
2.二叉平衡树
AVL树是最早被发明的⾃平衡⼆叉查找树。在AVL树中,任⼀节点对应的两棵⼦树的最⼤⾼度差为 1,因此它也被称为⾼度平衡树。查找、插⼊和删除在平均和最坏情况下的时间复杂度都是 O(logn)。 增加和删除元素的操作则可能需要借由⼀次或多次树旋转,以实现树的重新平衡。
定义:
平衡⼆叉查找树:简称平衡⼆叉树。
由前苏联的数学家 Adelse-Velskil 和 Landis 在 1962 年提出 的⾼度平衡的⼆叉树,根据科学家的英⽂名也称为 AVL 树。它具有如下⼏个性质:
1、可以是空树。
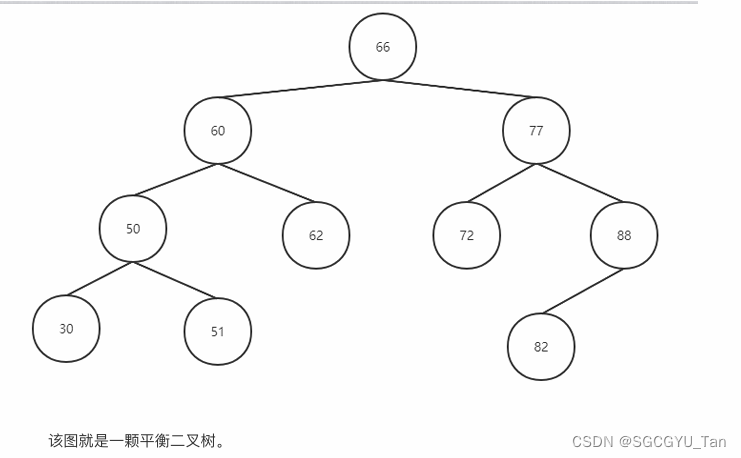
2、假如不是空树,任何⼀个节点的左⼦树与右⼦树都是平衡⼆叉树,并且⾼度之差的绝对值不超 过 1。
如图:
3.平衡因子
某节点的左⼦树与右⼦树的⾼度(深度)差即为该节点的平衡因⼦(BF,Balance Factor),平衡⼆叉树中不存在平衡因大于 1 的节点。在⼀棵平衡⼆叉树中,节点的平衡因⼦只能取 0 、1 或者 -1 ,分别对应着左右⼦树等⾼,左⼦树⽐较⾼,右⼦树⽐较⾼。
4.代码展示
1.结点结构
typedef struct AVLnode
{
int data;
struct AVLnode * l;
struct AVLnode * r;
int h;
}AVLNode,*AVLTree;2.插入操作
1.先查找 同BST
2.后插入:
①先执行BST的插入操作
//递归版本 get_h是获得结点高度的函数
AVLTree AVL_insert(AVLTree ro, int k)
{
if (ro == NULL)
{
AVLNode *s = new AVLNode;
s->data = k;
s->l = s->r = NULL;
s->h = 1;
return s;//递归尽头
}
if (k < ro->data)
{
ro->l = AVL_insert(ro->l, k);
//有可能导致ro左子树的高度-右子树的高度>1
if (get_h(ro->l) - get_h(ro->r) > 1)
{
//失衡 判断LL还是LR
AVLNode * n = ro->l;
if (n->data > k)
{
//LL 此时失衡结点是ro
ro = LL_rotation(ro);
}
else
{
//LR
ro = LR_rotation(ro);
}
}
}
else
{
ro->r = AVL_insert(ro->r, k);
if (get_h(ro->r) - get_h(ro->l) > 1)
{
//失衡 判断RR还是RL
AVLNode * n = ro->r;
if (n->data < k)
{
//RR 此时失衡结点是ro
ro = RR_rotation(ro);
}
else
{
//RL
ro = RL_rotation(ro);
}
}
}
ro->h= Max(get_h(ro->l), get_h(ro->r)) + 1;
return ro;
}②判断有没有失衡结点,若有则调整为平衡状态
调整方式为左右旋转
0.旋转操作展示
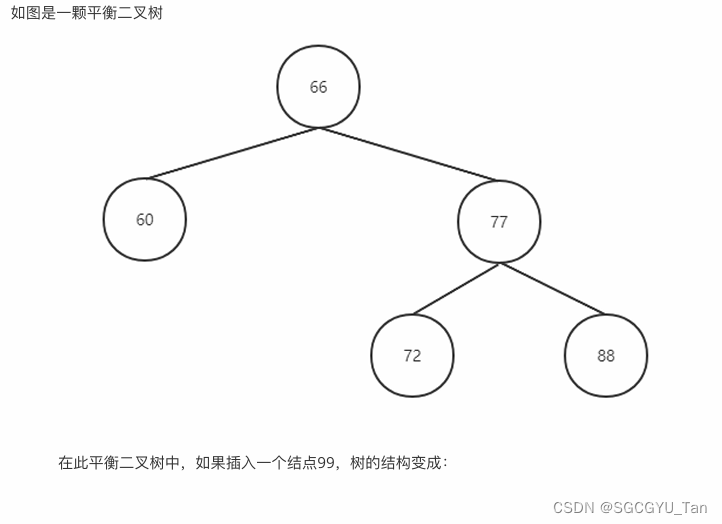
左旋:
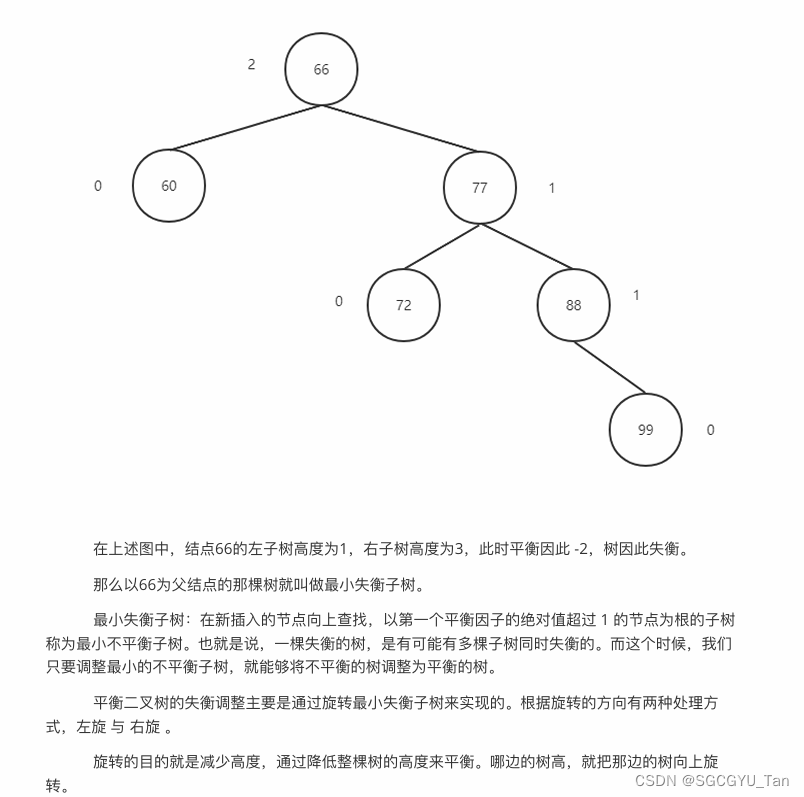
以上图为例,加⼊新节点 99 后, 节点 66 的左⼦树⾼度为 1,右⼦树⾼度为 3,此时平衡因⼦为 -2。为保证树的平衡,此时需要对节点 66 做出旋转,因为右⼦树⾼度⾼于左⼦树,对节点进⾏左旋操作,流程如下:
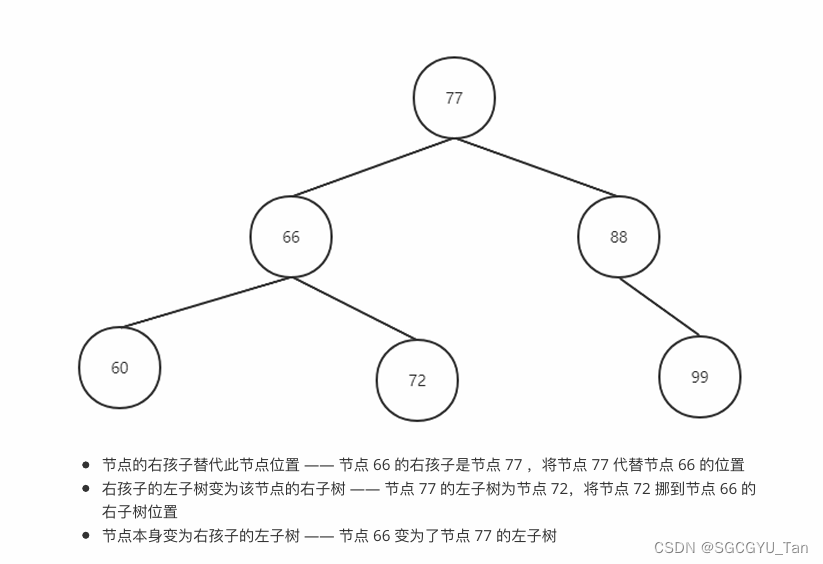
1、结点的右孩⼦结点替代此结点的位置
2、右孩⼦的左⼦树变成该结点的右⼦树
3、结点本身变成右孩⼦的左⼦树
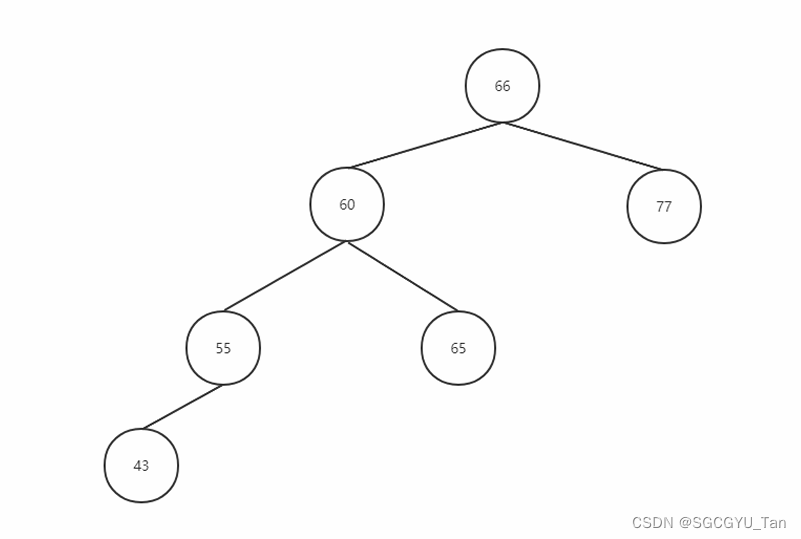
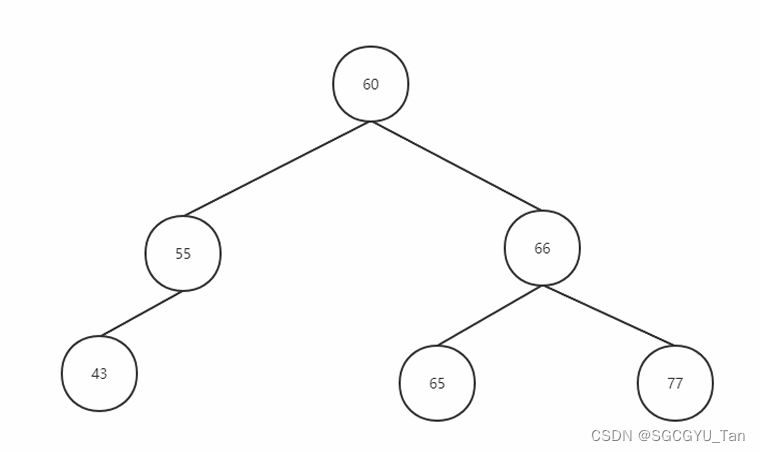
右旋:
右旋操作与左旋类似,操作流程为:
1. 节点的左孩⼦代表此节点
2. 节点的左孩⼦的右⼦树变为节点的左⼦树
3. 将此节点作为左孩⼦节点的右⼦树。
假设⼀颗AVL树的某个节点为A,有四种操作会使得A的左右⼦树⾼度差⼤于1,从⽽破坏AVL树的平衡。 平衡⼆叉树的插⼊有以下四种情况。
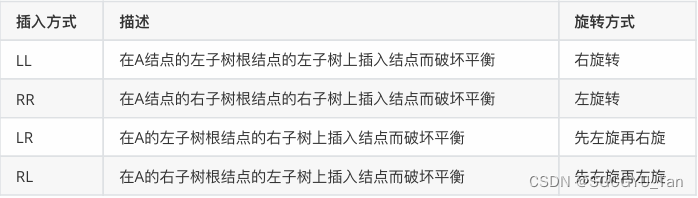
1.LL平衡旋转
//调整函数
AVLTree LL_rotation(AVLTree x)//LL是指左子树左孩子,右旋
{
AVLNode * y = x->l;
x->l = y->r;
y->r = x;
x->h = Max(get_h(x->l), get_h(x->r)) + 1;
y->h = Max(get_h(y->l), get_h(y->r)) + 1;
return y;
}
2.RR平衡旋转
AVLTree RR_rotation(AVLTree x)//LL是指右子树右孩子,左旋
{
AVLNode * y = x->r;
x->r = y->l;
y->l = x;
x->h = Max(get_h(x->l), get_h(x->r)) + 1;
y->h = Max(get_h(y->l), get_h(y->r)) + 1;
return y;
}
3.LR平衡旋转
AVLTree LR_rotation(AVLTree x)
{
x->l = RR_rotation(x->l);
x = LL_rotation(x);
return x;
}
4.RL平衡旋转
AVLTree RL_rotation(AVLTree x)
{
x->r = LL_rotation(x->r);
x = RR_rotation(x);
return x;
}5.总结
1. 在所有的不平衡情况中,都是按照先寻找最⼩不平衡树,然后寻找所属的不平衡类别,再根据 4 种类别进⾏固定化程序的操作。
2. LL , LR ,RR ,RL其实已经为我们提供了最后哪个节点作为新的根指明了⽅向。如 LR 型最后的根 节点为原来的根的左孩⼦的右孩⼦,RL 型最后的根节点为原来的根的右孩⼦的左孩⼦。只要记住 这四种情况,可以很快地推导出所有的情况。
3. 维护平衡⼆叉树,最麻烦的地方在于平衡因⼦的维护。⼀定要多画。多理解。
3.删除操作
AVL树的删除操作和二叉排序树的删除操作相同,只是多了确保平衡因子的操作。
都分成了四种情况:
1. 删除叶⼦结点
2. 删除的结点只有左⼦树
3. 删除的结点只有右⼦树
4. 删除的节点既有左⼦树⼜有右⼦树 只不过对于AVL树来说,你要删除⼀个结点后需要重新检查平衡性并修正。同时,删除操作与 插⼊操作后的平衡修正区别在于,插⼊操作后只需要对第⼀个⾮平衡节点进⾏修正,⽽删除操作需要修正所有的⾮平衡结点。
删除操作的⼤致步骤如下: 以前三种情况为基础尝试删除节点,并将访问节点⼊栈。
如果尝试删除成功,则依次检查栈顶节点的平衡状态,遇到⾮平衡节点,即进⾏旋转平衡,直到栈空。
如果尝试删除失败,证明是第四种情况。这时先找到被删除节点的右⼦树最⼩节点并删除它,将访 问节点继续⼊栈。
再依次检查栈顶节点的平衡状态和修正直到栈空。
对于删除操作造成的⾮平衡状态的修正,可以这样理解:对左或者右⼦树的删除操作相当于对右或者左⼦树的插⼊操作,然后再对应上插⼊的四种情况选择相应的旋转就好了。
//删除
//1.先执行BST删除操作
//2.x的长辈可能失衡 此时先调整最小失衡子树
//调整: 1.左边删除相当于(右边h-左边h 增大了1)右边插入 2.右边删除相当于(左边h-右边h 增大了1)左边插入
//谁失衡了它就是三个结点中最高的点
//左边删除:失衡结点的右孩子r,r的右子树高度>=r左子树高度(RR) r的右子树高度<r的左子树高度(RL)
//右边删除:失衡结点的左孩子l,l的左子树高度>=l右子树高度(LL) l的左子树高度<r的右子树高度(LR)
AVLNode* find_re(AVLNode *p)//找到某结点的前驱
{
while (p->l != NULL)
{
p = p->l;
}
return p;
}
AVLTree AVL_delete(AVLTree ro, int x)
{
if (ro == NULL)
{
return NULL;
}
if (x < ro->data)
{
ro->l = AVL_delete(ro->l, x);
//删除就可能存在失衡(失衡结点是ro->l)
if (get_h(ro->r) - get_h(ro->l) > 1)
{//RR RL
AVLNode * t = ro->r;
if (get_h(t->r) >= get_h(t->l))
{//RR
ro = RR_rotation(ro);
}
else
{//RL
ro = RL_rotation(ro);
}
}
}
else if (x > ro->data)
{
ro->r = AVL_delete(ro->r, x);
if (get_h(ro->l) - get_h(ro->r) > 1)
{//LL LR
AVLNode * t = ro->l;
if (get_h(t->l) >= get_h(t->r))
{//LL
ro = LL_rotation(ro);
}
else
{//LR
ro = LR_rotation(ro);
}
}
}
else
{
if (ro->l != NULL &&ro->r != NULL)
{
//度为2
//找后继
AVLNode * re = find_re(ro->r);
ro->data = re->data;
ro->r = AVL_delete(ro->r, re->data);//以ro->r为根的子树中删除值为re->data的结点
if (get_h(ro->l) - get_h(ro->r) > 1)
{//LL LR
AVLNode * t = ro->l;
if (get_h(t->l) >= get_h(t->r))
{//LL
ro = LL_rotation(ro);
}
else
{//LR
ro = LR_rotation(ro);
}
}
}
else
{
AVLNode * s = ro;
//度为1或0
if (ro->l == NULL)
{
ro = ro->r;
}
else
{
ro = ro->l;
}
delete s;
s = NULL;
}
}
if (ro != NULL)//root为空时不需要计算高度
{
ro->h = Max(get_h(ro->l), get_h(ro->r)) + 1;
}
return ro;
}5.算法分析
本⽂主要介绍了平衡⼆叉树的相关内容,AVL平衡⼆叉树很好的解决了⼆叉搜索树在遇到有序序 列性能退化为O(N)的情况,使得在最坏情况下的搜索效率仍然能够达到O(logN),但这种优化是牺牲了插⼊和删除的性能换来的,故⽽AVL树并不适合需要频繁插⼊和删除的场景,⽽红黑树则是权衡了这种情况,其并不强调严格的平衡性,⽽是保持⼀定的平衡性,从⽽使得在搜索,插⼊,删除的场景下均有⼀个不错的速度,这个会在后续的学习中分析

















 812
812

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









