







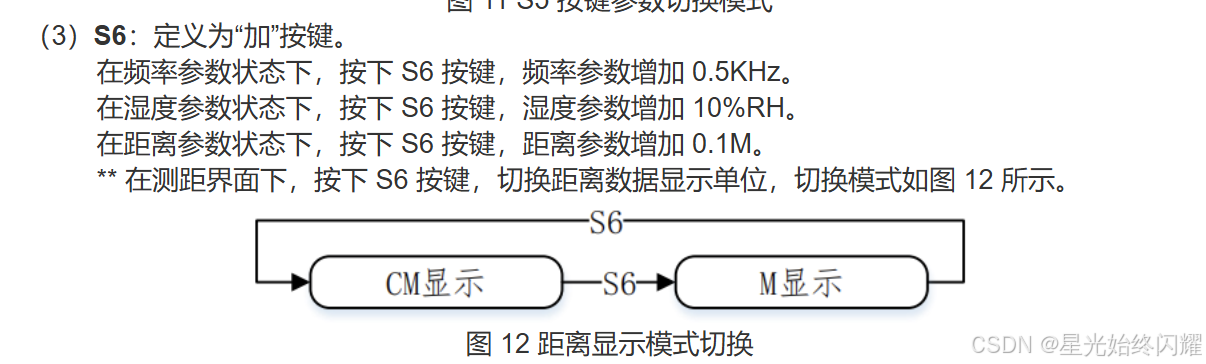
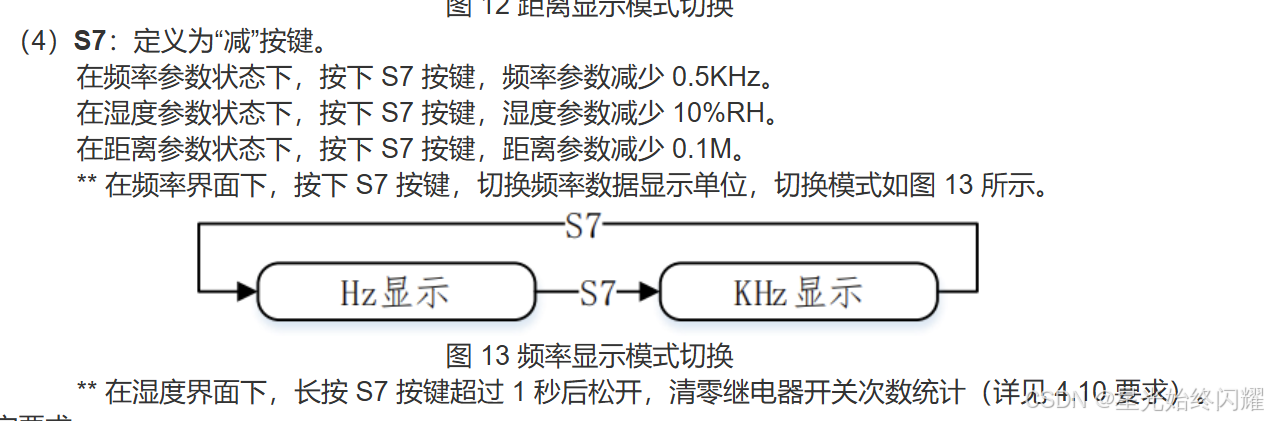
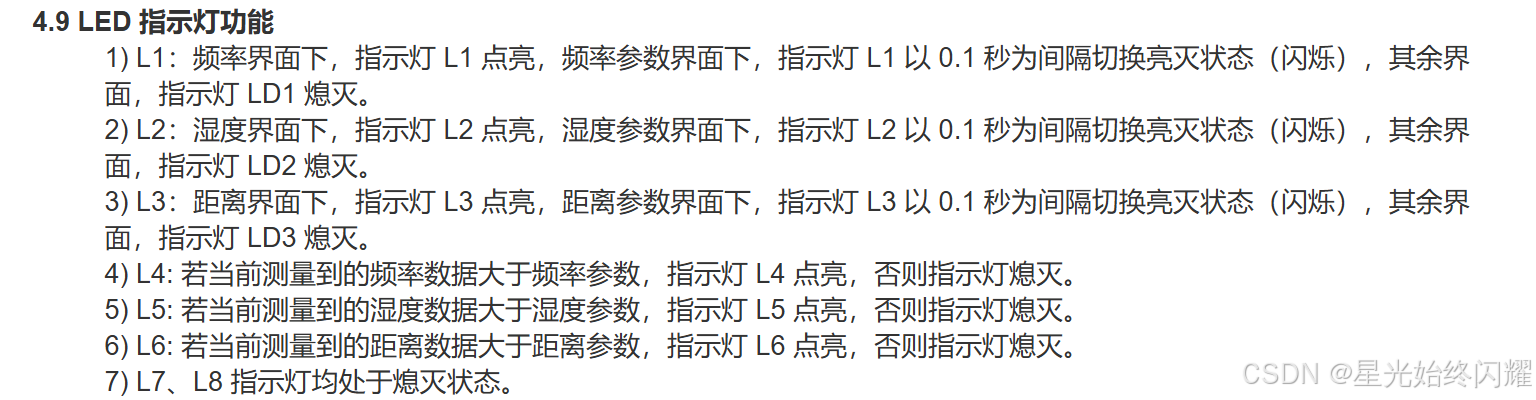
第十三届国赛实现起来整体不难,唯一一个可能不太好实现的就是通过电机MOTOR输出PWM(不太好实现是基于指不了解PWM和不知道MOTOR),当你写完程序发现板子上都能正常实现每个功能,一提交程序就被莫名其妙的扣了几分,emm这个也是很正常的,本篇文章的代码是经过了十几次反复修改得到的最终代码,评测可以稳定在84、85分左右。
附件:第十三届蓝桥杯单片机国赛

一、准备工作
1.各模块底层代码
Init.c
#include <Init.h>
void SystemInit()
{
P0 = 0xff;
P2 = P2 & 0x1f | 0x80;
P2 &= 0x1f;
P0 = 0x00;
P2 = P2 & 0x1f | 0xa0;
P2 &= 0x1f;
}
key.c
#include <key.h>
unsigned char KeyDisp(void)
{
unsigned char temp = 0;
if(P33 == 0) temp = 4;
if(P32 == 0) temp = 5;
if(P31 == 0) temp = 6;
if(P30 == 0) temp = 7;
return temp;
}
seg.c
#include <seg.h>
code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0xff, //空
0x8e, //F
0x89, //H
0x88, //A
0x8c //P
};
void SegDisp(unsigned char wela, unsigned char dula, unsigned char point)
{
P0 = 0xff;
P2 = P2 & 0x1f | 0xe0;
P2 &= 0x1f;
P0 = (0x01 << wela);
P2 = P2 & 0x1f | 0xc0;
P2 &= 0x1f;
P0 = Seg_Table[dula];
if(point)
P0 &= 0x7f;
P2 = P2 & 0x1f | 0xe0;
P2 &= 0x1f;
}
wave.c
#include <wave.h>
sbit Tx = P1^0;
sbit Rx = P1^1;
void Delay12us(void) //@12.000MHz
{
unsigned char data i;
_nop_();
_nop_();
i = 35;
while (--i);
}
void WaveInit()
{
unsigned char i;
EA = 0;
for(i = 0; i < 8; i++)
{
Tx = 1;
Delay12us();
Tx = 0;
Delay12us();
}
EA = 1;
}
unsigned char GetWave()
{
unsigned int time;
CMOD = 0x00;
CH = CL = 0;
WaveInit();
CR = 1;
while(Rx && !CF);
CR = 0;
if(CF)//数据溢出
{
CF = 0;
return 0;
}
else
{
time = (CH << 8) | CL;
return time * 0.017;
}
}
led.c
#include <led.h>
void LedDisp(unsigned char *ucLed)
{
unsigned char i, temp = 0x00;
static unsigned char temp_old = 0xff;
for(i = 0; i < 8; i++)
temp |= (ucLed[i] << i);
if(temp != temp_old)
{
P0 = ~temp;
P2 = P2 & 0x1f | 0x80;
P2 &= 0x1f;
temp_old = temp;
}
}
unsigned char temp1 = 0x00;
static unsigned char temp1_old = 0xff;
//1-亮
void Relay(bit enable)
{
if(enable)
temp1 |= 0x10;
else
temp1 &= ~0x10;
if(temp1 != temp1_old)
{
P0 = temp1;
P2 = P2 & 0x1f | 0xa0;
P2 &= 0x1f;
temp1_old = temp1;
}
}
void Motor(bit enable)
{
if(enable)
temp1 |= 0x20;
else
temp1 &= ~0x20;
if(temp1 != temp1_old)
{
P0 = temp1;
P2 = P2 & 0x1f | 0xa0;
P2 &= 0x1f;
temp1_old = temp1;
}
}
2.main.c
如果你使用的是下面的模板,可以将AD、DA、EEPROM和超声波读取一起放在SegProc函数中,做正常省赛题目是可以的,但是本题这样做会导致数码管处理数据过多有些数据还没处理完就退出了,如果你使用的是调度器,建议各部分时间分配如下:KeyProc10ms,SegProc100ms,WaveProc160ms,IICProc:160ms,LedProc:1ms。
#include <Init.h>
#include <led.h>
#include <key.h>
#include <seg.h>
#include <wave.h>
#include <iic.h>
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long int u32;
/*延迟*/
idata u8 KeySlow; //按键延迟10s
idata u8 SegSlow; //数码管延迟200ms
/*按键*/
idata u8 KeyVal,KeyDown,KeyUp,KeyOld;
idata bit KeyPressFlag; //按键长按标志位
idata u16 Time_1000ms; //长按1s
/*数码管*/
idata u8 SegPos;
pdata u8 SegBuf[8] = {10,10,10,10,10,10,10,10};
pdata u8 SegPoint[8] = {0,0,0,0,0,0,0,0};
idata u8 SegMode; //主页面 0-频率页面 1-湿度页面 2-测距页面 3-参数页面
idata u8 SetMode; //参数页面 0-频率参数 1-湿度参数 2-距离参数
idata bit distance_mode; //距离控制标志位 0-cm 1-m
idata bit freq_mode; //频率控制标志位 0-hz 1-khz
/*频率*/
idata u16 freq, Time_1s; //频率
idata float freq_khz;
idata float freq_set = 9; //频率参数 初值9khz 范围1.0~12.0
idata bit freq_flag; //频率数据大于频率参数时为1
/*湿度*/
idata u8 humidity; //湿度
idata u8 humidity_set = 40; //湿度参数 初值40 范围10~60
idata bit humidity_flag; //湿度数据大于湿度参数时为1
/*超声波*/
idata u8 distance_cm; //超声波测距 cm
idata u8 distance_m_10x = 6; //超声波参数,初值0.6m 范围0.1~1.2m
idata bit distance_flag; //超声波数据大于超声波参数时为1
/*指示灯*/
pdata u8 ucLed[8] = {0,0,0,0,0,0,0,0};
idata bit LedFlash; //指示灯闪烁标志位
idata u8 Time_100ms; //100ms闪烁1次
idata u8 RelayCount; //继电器开关次数
idata u8 pwm_level; //PWM输出占空比
idata u8 pwm_count; //PWM计时
void KeyProc()
{
KeySlow = 1;
KeyVal = KeyDisp();
KeyDown = KeyVal & ~KeyOld;
KeyUp = ~KeyVal & KeyOld;
KeyOld = KeyVal;
switch(KeyDown)
{
}
}
void SegProc()
{
if(SegSlow)
return;
SegSlow= 1;
/*AD*/
float RB2 = AdRead() / 51.0;
/*超声波*/
distance_cm = GetWave() + 2;
switch(SegMode)
{
case 0://频率页面
break;
case 1://湿度页面
break;
case 2://测距页面
break;
case 3://参数页面
switch(SetMode)
{
case 0://频率参数
break;
case 1://湿度参数
break;
case 2://距离参数
break;
}
break;
}
}
void LedProc()
{
}
void Timer0_Init(void) //0微秒@12.000MHz
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x05; //设置定时器模式
TL0 = 0; //设置定时初始值
TH0 = 0; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Timer1_Init(void) //1毫秒@12.000MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x18; //设置定时初始值
TH1 = 0xFC; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //使能定时器1中断
EA = 1;
}
void Timer2_Init(void) //100微秒@12.000MHz
{
AUXR &= 0xFB; //定时器时钟12T模式
T2L = 0x9C; //设置定时初始值
T2H = 0xFF; //设置定时初始值
AUXR |= 0x10; //定时器2开始计时
IE2 |= 0x04; //使能定时器2中断
}
void Timer1_Isr(void) interrupt 3
{
if(++KeySlow == 10) KeySlow = 0; //按键延迟10ms
if(++SegSlow == 200) SegSlow = 0;//数码管延迟100ms
if(++SegPos == 8)
SegPos = 0;
SegDisp(SegPos,SegBuf[SegPos],SegPoint[SegPos]);
//NE555
if(++Time_1s == 1000)
{
Time_1s = 0;
freq = (TH0 << 8) | TL0;
TH0 = TL0 = 0;
}
/*继电器*/
Relay(distance_flag);
/*Led*/
LedDisp(ucLed);
}
void Timer2_Isr(void) interrupt 12
{
}
void main()
{
SystemInit();
Timer0_Init();
Timer1_Init();
Timer2_Init();
while(1)
{
KeyProc();
SegProc();
LedProc();
}
}
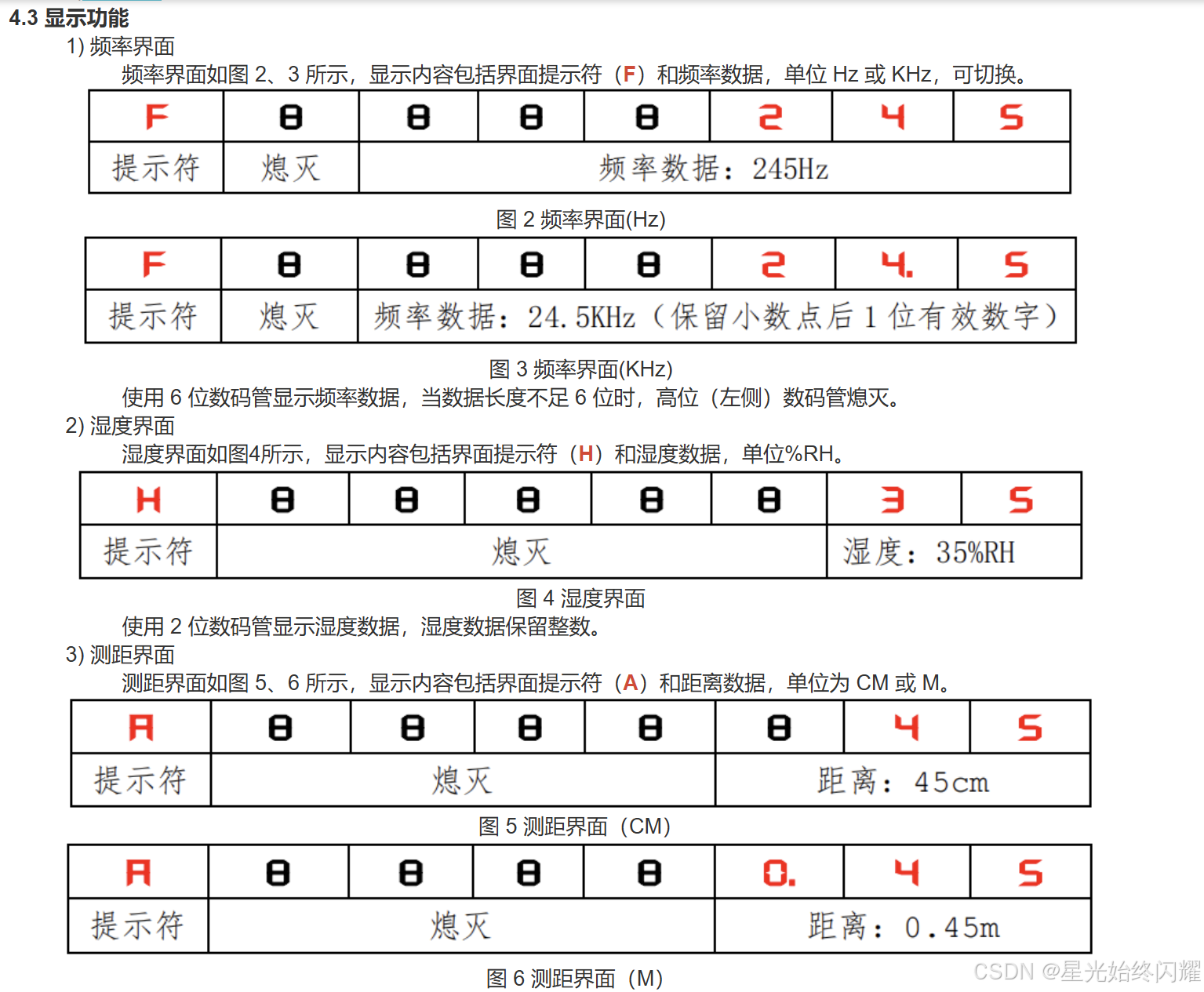
二、数码管
/*数码管*/
idata u8 SegPos;
pdata u8 SegBuf[8] = {10,10,10,10,10,10,10,10};
pdata u8 SegPoint[8] = {0,0,0,0,0,0,0,0};
idata u8 SegMode; //主页面 0-频率页面 1-湿度页面 2-测距页面 3-参数页面
idata u8 SetMode; //参数页面 0-频率参数 1-湿度参数 2-距离参数
idata bit distance_mode; //距离控制标志位 0-cm 1-m
idata bit freq_mode; //频率控制标志位 0-hz 1-khz
/*频率*/
idata u16 freq, Time_1s; //频率
idata float freq_khz;
idata float freq_set = 9; //频率参数 初值9khz 范围1.0~12.0
/*湿度*/
idata u8 humidity; //湿度
idata u8 humidity_set = 40; //湿度参数 初值40 范围10~60
/*超声波*/
idata u8 distance_cm; //超声波测距 cm
idata u8 distance_m_10x = 6; //超声波参数,初值0.6m 范围0.1~1.2m
void WaveProc()
{
distance_cm = GetWave() + 2;
}
void IICProc()
{
/*AD*/
float RB2 = AdRead() / 51.0;
//电压转湿度
if(RB2 >= 5.0)
humidity = 100;
else
humidity = 20 * RB2;
}
void SegProc()
{
switch(SegMode)
{
case 0://频率页面
SegBuf[0] = 11;//F
SegBuf[1] = 10;
SegBuf[2] = 10;
SegPoint[6] = freq_mode;//切换cm/m模式
if(!freq_mode)//cm模式
{
SegBuf[3] = (freq/10000%10)?freq/10000%10:10;
SegBuf[4] = (freq/1000%10==0&&SegBuf[3]==10)?10:freq/1000%10;
SegBuf[5] = (freq/100%10==0&&SegBuf[4]==10)?10:freq/100%10;
SegBuf[6] = (freq/10%10==0&&SegBuf[5]==10)?10:freq/10%10;
SegBuf[7] = freq%10;
}
else//m模式
{
SegBuf[3] = 10;
SegBuf[4] = 10;
SegBuf[5] = (u8)freq_khz / 10 % 10;
if(!SegBuf[5]) SegBuf[5] = 10;
SegBuf[6] = (u8)freq_khz % 10;
SegBuf[7] = (u8)(freq_khz * 10) % 10;
}
break;
case 1://湿度页面
SegBuf[0] = 12;//H
SegBuf[3] = 10;
SegBuf[4] = 10;
SegBuf[5] = 10;
SegBuf[6] = humidity / 10;
SegBuf[7] = humidity % 10;
SegPoint[6] = 0;
break;
case 2://测距页面
SegBuf[0] = 13;//A
if(!distance_mode)//cm
{
if(distance_cm < 10)
{
SegBuf[5] = 10;
SegBuf[6] = 10;
SegBuf[7] = distance_cm % 10;
}
else
{
SegBuf[5] = distance_cm / 100 ? distance_cm / 100 : 10;
SegBuf[6] = distance_cm / 10 % 10;
SegBuf[7] = distance_cm % 10;
}
SegPoint[5] = 0;
}
else//m
{
SegBuf[5] = distance_cm / 100;
SegBuf[6] = distance_cm / 10 % 10;
SegBuf[7] = distance_cm % 10;
SegPoint[5] = 1;
}
break;
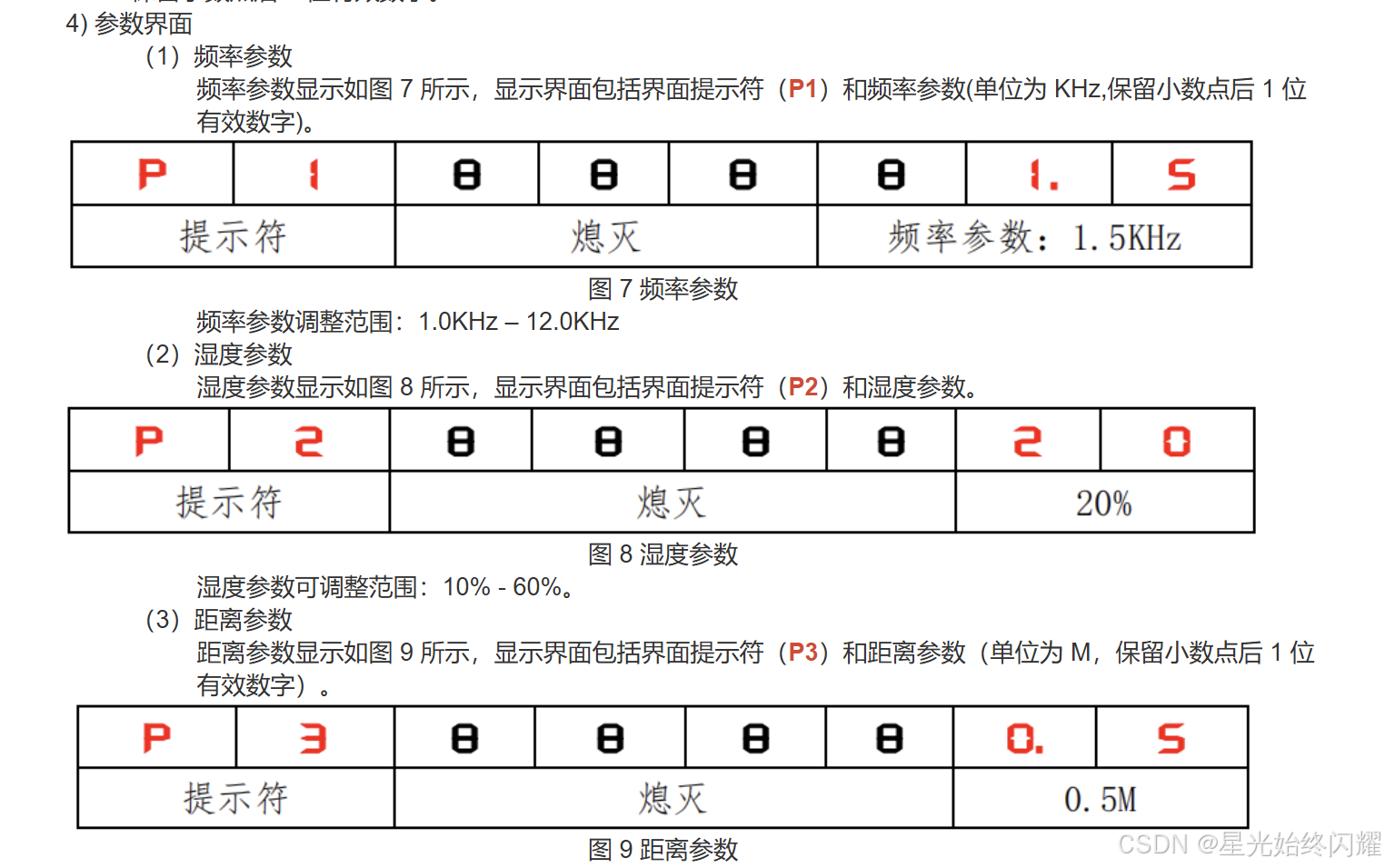
case 3://参数页面
SegBuf[0] = 14;//P
SegBuf[1] = SetMode + 1;
SegBuf[2] = 10;
SegBuf[3] = 10;
SegBuf[4] = 10;
switch(SetMode)
{
case 0://频率参数
SegBuf[5] = (u8)freq_set / 10 ? freq_set / 10 : 10;
SegBuf[6] = (u8)freq_set % 10;
SegBuf[7] = (u8)(freq_set * 10) % 10;
SegPoint[6] = 1;
break;
case 1://湿度参数
SegBuf[5] = 10;
SegBuf[6] = humidity_set / 10;
SegBuf[7] = humidity_set % 10;
SegPoint[6] = 0;
break;
case 2://距离参数
SegBuf[6] = distance_m_10x / 10;
SegBuf[7] = distance_m_10x % 10;
SegPoint[6] = 1;
break;
}
break;
}
}
void Timer1_Isr(void) interrupt 3
{
systick++;
if(++SegPos == 8)
SegPos = 0;
SegDisp(SegPos,SegBuf[SegPos],SegPoint[SegPos]);
//NE555
if(++Time_1s == 1000)
{
Time_1s = 0;
freq = (TH0 << 8) | TL0;
freq_khz = freq / 1000.0;
TH0 = TL0 = 0;
}
}
三、按键
1.S4、S5
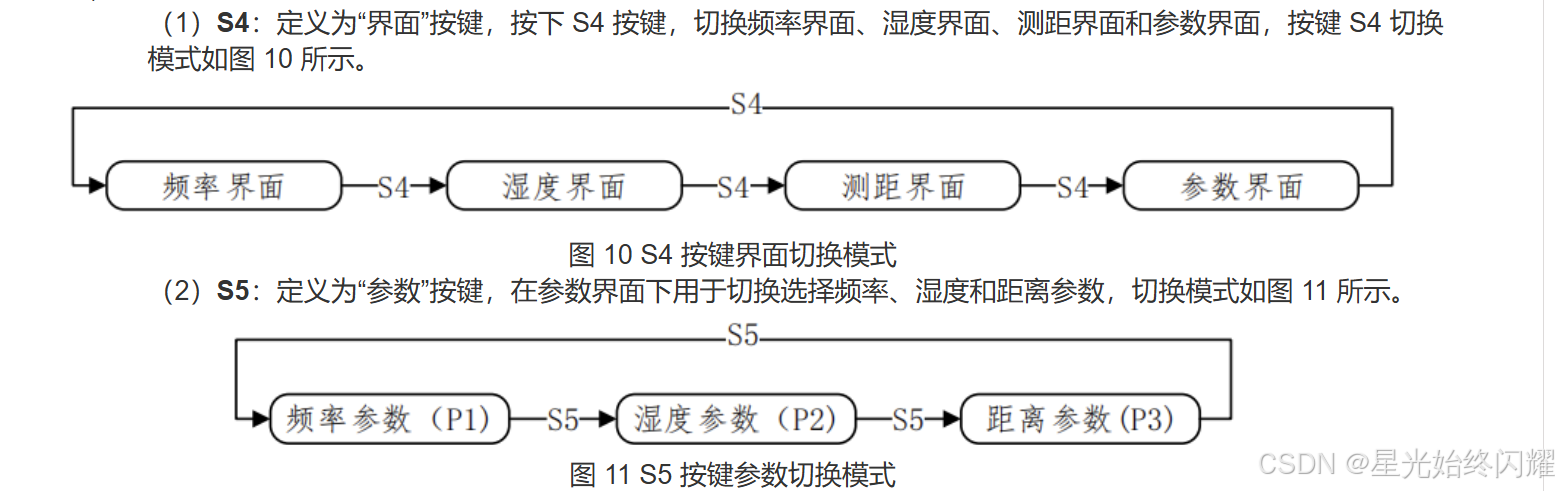
void KeyProc()
{
KeyVal = KeyDisp();
KeyDown = KeyVal & ~KeyOld;
KeyUp = ~KeyVal & KeyOld;
KeyOld = KeyVal;
switch(KeyDown)
{
case 4:
if(++SegMode == 4)
SegMode = 0;
if(SegMode == 0)
SetMode = 0;
break;
case 5:
if(SegMode == 3)
if(++SetMode == 3)
SetMode = 0;
break;
}
}
2.S6
void KeyProc()
{
KeyVal = KeyDisp();
KeyDown = KeyVal & ~KeyOld;
KeyUp = ~KeyVal & KeyOld;
KeyOld = KeyVal;
switch(KeyDown)
{
case 6:
if(SegMode == 2)
distance_mode = !distance_mode;
else if(SegMode == 3)//+
{
if(!SetMode)//频率参数每次加0.5
{
freq_set += 0.5;
if(freq_set == 12.5)
freq_set = 1.0;
}
else if(SetMode == 1)//湿度参数每次加10
{
humidity_set += 10;
if(humidity_set == 70)
humidity_set = 10;
}
else//距离参数每次加0.1 也就是加1
{
if(++distance_m_10x == 13)
distance_m_10x = 1;
}
}
break;
}
}
3.S7
void KeyProc()
{
KeyVal = KeyDisp();
KeyDown = KeyVal & ~KeyOld;
KeyUp = ~KeyVal & KeyOld;
KeyOld = KeyVal;
if(SegMode == 1)//湿度页面下长按清空继电器计数值
{
if(KeyDown == 7)
KeyPressFlag = 1;
if(KeyUp == 7)
{
KeyPressFlag = 0;
if(Time_1000ms >= 1000)
{
RelayCount = 0;
}
}
}
switch(KeyDown)
{
case 7:
if(!SegMode)
freq_mode = !freq_mode;
else if(SegMode == 3)//-
{
if(!SetMode)//频率参数每次-0.5
{
freq_set -= 0.5;
if(freq_set == 0.5)
freq_set = 12.0;
}
else if(SetMode == 1)//湿度参数每次-10
{
humidity_set -= 10;
if(humidity_set == 0)
humidity_set = 60;
}
else//距离参数每次-0.1 也就是-1
{
if(--distance_m_10x == 0)
distance_m_10x = 12;
}
}
break;
}
}
void Timer1_Isr(void) interrupt 3
{
//按键长按计时
if(KeyPressFlag)
{
if(++Time_1000ms >= 1000)
Time_1000ms = 1000;
}
else
Time_1000ms = 0;
}
四、指示灯
/*频率*/
idata bit freq_flag; //频率数据大于频率参数时为1
/*湿度*/
idata bit humidity_flag; //湿度数据大于湿度参数时为1
/*超声波*/
idata bit distance_flag; //超声波数据大于超声波参数时为1
void WaveProc()
{
distance_cm = GetWave() + 2;
distance_flag = (distance_cm > distance_m_10x*10);
}
void IICProc()
{
//。。。
humidity_flag = (humidity > humidity_set);
}
void LedProc()
{
u8 i;
/*Led*/
if(SegMode != 3)
{
for(i = 0; i < 3; i++)
ucLed[i] = (i == SegMode);
}
else
{
for(i = 0; i < 3; i++)
ucLed[i] = (i == SetMode && LedFlash);
}
ucLed[3] = freq_flag;
ucLed[4] = humidity_flag;
ucLed[5] = distance_flag;
LedDisp(ucLed);
}
void Timer1_Isr(void) interrupt 3
{
if(++Time_1s == 1000)
{
Time_1s = 0;
freq = (TH0 << 8) | TL0;
freq_khz = freq / 1000.0;
TH0 = TL0 = 0;
freq_flag = (freq_khz > freq_set);
}
//指示灯闪烁
if(SegMode == 3)
{
if(++Time_100ms == 100)
{
Time_100ms = 0;
LedFlash = !LedFlash;
}
}
else
{
Time_100ms = 0;
LedFlash = 0;
}
}
五、继电器、EEPROM


这边注意的是,EEPROM存放的是继电器开关的次数,而不是只统计开继电器的次数,并且要进行重复检测防止继电器重复触发。
idata u8 RelayCount; //继电器开关次数
void WaveProc()
{
distance_cm = GetWave() + 2;
distance_flag = (distance_cm > distance_m_10x*10);
}
void LedProc()
{
idata bit relay_has_count;//继电器计数重复标志位
/*继电器*/
if(!relay_has_count && distance_flag)
{
relay_has_count = 1;
RelayCount++;
}
else if(relay_has_count && !distance_flag)
{
relay_has_count = 0;
RelayCount++;
}
Relay(distance_flag);
EepromWrite(&RelayCount,0,1);
}
六、PWM

输出频率为1KHz的脉冲,转换为时间也就是1ms,占空比为80%和20%也就是在1ms内高电平时间占总周期的80%和20%,因此要使用定时器去定时100us,也就是让定时器2定时100us中断一次专门用于PWM。
idata u8 pwm_level; //PWM输出占空比
idata u8 pwm_count; //PWM计时
void LedProc()
{
/*MOTOR*/
pwm_level = freq_flag ? 8 : 2;
}
void Timer2_Init(void) //100微秒@12.000MHz
{
AUXR &= 0xFB; //定时器时钟12T模式
T2L = 0x9C; //设置定时初始值
T2H = 0xFF; //设置定时初始值
AUXR |= 0x10; //定时器2开始计时
IE2 |= 0x04; //使能定时器2中断
}
void Timer2_Isr(void) interrupt 12
{
if(++pwm_count == 10)
pwm_count = 0;
Motor(pwm_count < pwm_level);
}
七、完整代码
在按键函数和数码管函数加入延迟,将超声波和IIC处理函数添加到数码管数据处理函数中应该可以运行。
#include <Init.h>
#include <led.h>
#include <key.h>
#include <seg.h>
#include <wave.h>
#include <iic.h>
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long int u32;
/*延迟*/
idata u8 KeySlow; //按键延迟10s
idata u8 SegSlow; //数码管延迟200ms
/*按键*/
idata u8 KeyVal,KeyDown,KeyUp,KeyOld;
idata bit KeyPressFlag; //按键长按标志位
idata u16 Time_1000ms; //长按1s
/*数码管*/
idata u8 SegPos;
pdata u8 SegBuf[8] = {10,10,10,10,10,10,10,10};
pdata u8 SegPoint[8] = {0,0,0,0,0,0,0,0};
idata u8 SegMode; //主页面 0-频率页面 1-湿度页面 2-测距页面 3-参数页面
idata u8 SetMode; //参数页面 0-频率参数 1-湿度参数 2-距离参数
idata bit distance_mode; //距离控制标志位 0-cm 1-m
idata bit freq_mode; //频率控制标志位 0-hz 1-khz
/*频率*/
idata u16 freq, Time_1s; //频率
idata float freq_khz;
idata float freq_set = 9; //频率参数 初值9khz 范围1.0~12.0
idata bit freq_flag; //频率数据大于频率参数时为1
/*湿度*/
idata u8 humidity; //湿度
idata u8 humidity_set = 40; //湿度参数 初值40 范围10~60
idata bit humidity_flag; //湿度数据大于湿度参数时为1
/*超声波*/
idata u8 distance_cm; //超声波测距 cm
idata u8 distance_m_10x = 6; //超声波参数,初值0.6m 范围0.1~1.2m
idata bit distance_flag; //超声波数据大于超声波参数时为1
/*指示灯*/
pdata u8 ucLed[8] = {0,0,0,0,0,0,0,0};
idata bit LedFlash; //指示灯闪烁标志位
idata u8 Time_100ms; //100ms闪烁1次
idata u8 RelayCount; //继电器开关次数
idata u8 pwm_level; //PWM输出占空比
idata u8 pwm_count; //PWM计时
void KeyProc()
{
KeySlow= 1;
KeyVal = KeyDisp();
KeyDown = KeyVal & ~KeyOld;
KeyUp = ~KeyVal & KeyOld;
KeyOld = KeyVal;
if(SegMode == 1)//湿度页面下长按清空继电器计数值
{
if(KeyDown == 7)
KeyPressFlag = 1;
if(KeyUp == 7)
{
KeyPressFlag = 0;
if(Time_1000ms >= 1000)
{
RelayCount = 0;
}
}
}
switch(KeyDown)
{
case 4:
if(++SegMode == 4)
SegMode = 0;
if(SegMode == 0)
SetMode = 0;
break;
case 5:
if(SegMode == 3)
if(++SetMode == 3)
SetMode = 0;
break;
case 6:
if(SegMode == 2)
distance_mode = !distance_mode;
else if(SegMode == 3)//+
{
if(!SetMode)//频率参数每次加0.5
{
freq_set += 0.5;
if(freq_set == 12.5)
freq_set = 1.0;
}
else if(SetMode == 1)//湿度参数每次加10
{
humidity_set += 10;
if(humidity_set == 70)
humidity_set = 10;
}
else//距离参数每次加0.1 也就是加1
{
if(++distance_m_10x == 13)
distance_m_10x = 1;
}
}
break;
case 7:
if(!SegMode)
freq_mode = !freq_mode;
else if(SegMode == 3)//-
{
if(!SetMode)//频率参数每次-0.5
{
freq_set -= 0.5;
if(freq_set == 0.5)
freq_set = 12.0;
}
else if(SetMode == 1)//湿度参数每次-10
{
humidity_set -= 10;
if(humidity_set == 0)
humidity_set = 60;
}
else//距离参数每次-0.1 也就是-1
{
if(--distance_m_10x == 0)
distance_m_10x = 12;
}
}
break;
}
}
void SegProc()
{
switch(SegMode)
{
case 0://频率页面
SegBuf[0] = 11;//F
SegBuf[1] = 10;
SegBuf[2] = 10;
SegPoint[6] = freq_mode;
if(!freq_mode)
{
SegBuf[3] = (freq/10000%10)?freq/10000%10:10;
SegBuf[4] = (freq/1000%10==0&&SegBuf[3]==10)?10:freq/1000%10;
SegBuf[5] = (freq/100%10==0&&SegBuf[4]==10)?10:freq/100%10;
SegBuf[6] = (freq/10%10==0&&SegBuf[5]==10)?10:freq/10%10;
SegBuf[7] = freq%10;
}
else
{
SegBuf[3] = 10;
SegBuf[4] = 10;
SegBuf[5] = (u8)freq_khz / 10 % 10;
if(!SegBuf[5]) SegBuf[5] = 10;
SegBuf[6] = (u8)freq_khz % 10;
SegBuf[7] = (u8)(freq_khz * 10) % 10;
}
break;
case 1://湿度页面
SegBuf[0] = 12;//H
SegBuf[3] = 10;
SegBuf[4] = 10;
SegBuf[5] = 10;
SegBuf[6] = humidity / 10;
SegBuf[7] = humidity % 10;
SegPoint[6] = 0;
break;
case 2://测距页面
SegBuf[0] = 13;//A
if(!distance_mode)//cm
{
if(distance_cm < 10)
{
SegBuf[5] = 10;
SegBuf[6] = 10;
SegBuf[7] = distance_cm % 10;
}
else
{
SegBuf[5] = distance_cm / 100 ? distance_cm / 100 : 10;
SegBuf[6] = distance_cm / 10 % 10;
SegBuf[7] = distance_cm % 10;
}
SegPoint[5] = 0;
}
else//m
{
SegBuf[5] = distance_cm / 100;
SegBuf[6] = distance_cm / 10 % 10;
SegBuf[7] = distance_cm % 10;
SegPoint[5] = 1;
}
break;
case 3://参数页面
SegBuf[0] = 14;//P
SegBuf[1] = SetMode + 1;
SegBuf[2] = 10;
SegBuf[3] = 10;
SegBuf[4] = 10;
switch(SetMode)
{
case 0://频率参数
SegBuf[5] = (u8)freq_set / 10 ? freq_set / 10 : 10;
SegBuf[6] = (u8)freq_set % 10;
SegBuf[7] = (u8)(freq_set * 10) % 10;
SegPoint[6] = 1;
break;
case 1://湿度参数
SegBuf[5] = 10;
SegBuf[6] = humidity_set / 10;
SegBuf[7] = humidity_set % 10;
SegPoint[6] = 0;
break;
case 2://距离参数
SegBuf[6] = distance_m_10x / 10;
SegBuf[7] = distance_m_10x % 10;
SegPoint[6] = 1;
break;
}
break;
}
}
void WaveProc()
{
distance_cm = GetWave() + 2;
distance_flag = (distance_cm > distance_m_10x*10);
}
void LedProc()
{
u8 i;
idata bit relay_has_count;//继电器计数重复标志位
/*继电器*/
if(!relay_has_count && distance_flag)
{
relay_has_count = 1;
RelayCount++;
}
else if(relay_has_count && !distance_flag)
{
relay_has_count = 0;
RelayCount++;
}
Relay(distance_flag);
/*Led*/
if(SegMode != 3)
{
for(i = 0; i < 3; i++)
ucLed[i] = (i == SegMode);
}
else
{
for(i = 0; i < 3; i++)
ucLed[i] = (i == SetMode && LedFlash);
}
ucLed[3] = freq_flag;
ucLed[4] = humidity_flag;
ucLed[5] = distance_flag;
LedDisp(ucLed);
/*MOTOR*/
pwm_level = freq_flag ? 8 : 2;
}
void IICProc()
{
float dat;
/*AD*/
float RB2 = AdRead() / 51.0;
if(RB2 >= 5.0)
humidity = 100;
else
humidity = 20 * RB2;
/*DA*/
if(humidity <= humidity_set)
dat = 1.0;
else if(humidity >= 80)
dat = 5.0;
else
dat = 4.0/(80-humidity_set)*humidity+1-4.0*humidity_set/(80-humidity_set);
DaWrite(dat * 51);
humidity_flag = (humidity > humidity_set);
/*EEPROM*/
EepromWrite(&RelayCount,0,1);
}
void Timer0_Init(void) //0微秒@12.000MHz
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x05; //设置定时器模式
TL0 = 0; //设置定时初始值
TH0 = 0; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Timer1_Init(void) //1毫秒@12.000MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x18; //设置定时初始值
TH1 = 0xFC; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //使能定时器1中断
EA = 1;
}
void Timer2_Init(void) //100微秒@12.000MHz
{
AUXR &= 0xFB; //定时器时钟12T模式
T2L = 0x9C; //设置定时初始值
T2H = 0xFF; //设置定时初始值
AUXR |= 0x10; //定时器2开始计时
IE2 |= 0x04; //使能定时器2中断
}
void Timer1_Isr(void) interrupt 3
{
if(++SegPos == 8)
SegPos = 0;
SegDisp(SegPos,SegBuf[SegPos],SegPoint[SegPos]);
//NE555
if(++Time_1s == 1000)
{
Time_1s = 0;
freq = (TH0 << 8) | TL0;
freq_khz = freq / 1000.0;
TH0 = TL0 = 0;
freq_flag = (freq_khz > freq_set);
}
//指示灯闪烁
if(SegMode == 3)
{
if(++Time_100ms == 100)
{
Time_100ms = 0;
LedFlash = !LedFlash;
}
}
else
{
Time_100ms = 0;
LedFlash = 0;
}
//按键长按计时
if(KeyPressFlag)
{
if(++Time_1000ms >= 1000)
Time_1000ms = 1000;
}
else
Time_1000ms = 0;
}
void Timer2_Isr(void) interrupt 12
{
if(++pwm_count == 10)
pwm_count = 0;
Motor(pwm_count < pwm_level);
}
void main()
{
SystemInit();
Timer0_Init();
Timer1_Init();
Timer2_Init();
while(1)
{
//。。。
}
}



















 5332
5332

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











