






计算机视觉的主要应用有
1.图像分类 2.目标检测
1.图像分类
1.图像分类是深度学习中最常见的应用之一。它的目标是将图像分到预定义的类别中。深度学习通过多层神经网络来学习图像的抽象特征。这些特征可以从原始像素值或者低级特征(如边缘、纹理等)中提取出来,然后通过多个隐藏层进行非线性组合和转换,最终得到高级语义特征。
2.卷积神经网络(Convolutional Neural Network, CNN):主要用于图像分类和识别任务,包括LeNet、AlexNet、VGG、GoogLeNet、ResNet 生成对抗网络(Generative Adversarial Network, GAN):用于生成新样本,主要包括GAN、DCGAN、WGAN等
1.图像分类
实际上,图像分类是分析一个输入图像并返回一个将图像分类的标签。标签总是来自预定义的可能类别集。 利用深度学习算法可以实现对猫的图像进行分类,如下图所示。
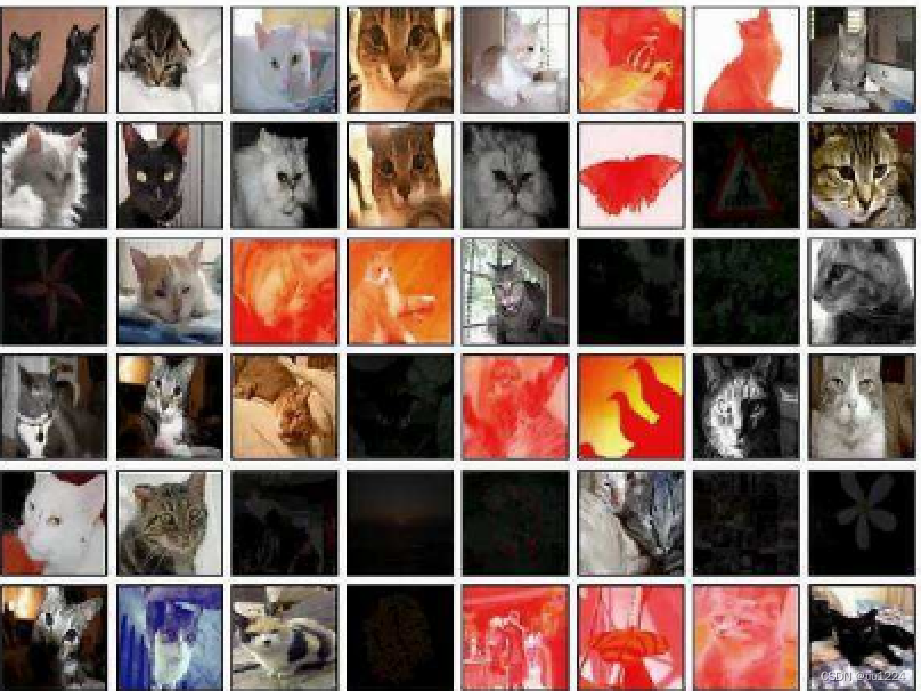
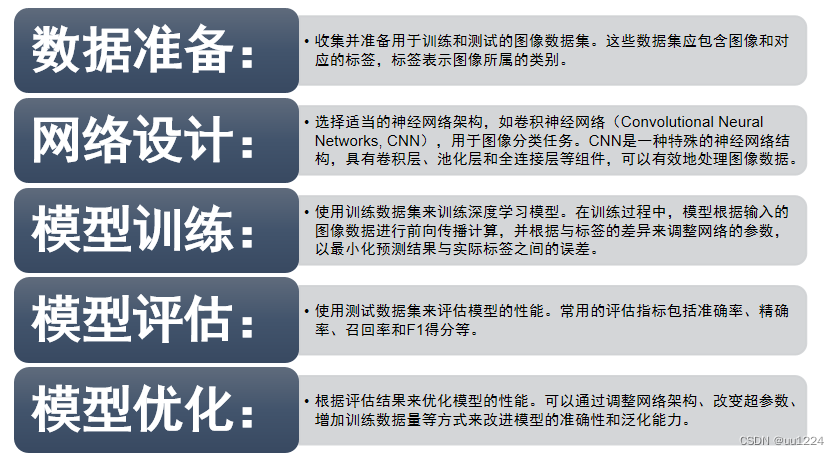
图像分类的过程一般包括以下步骤:
2.目标检测
目标检测是指在图像或视频中识别和定位特定目标的任务。目标可以是人、车辆、动物等。目标检测的目标是找出图像中的目标对象,并给出其位置和范围。 目标检测=分类+定位
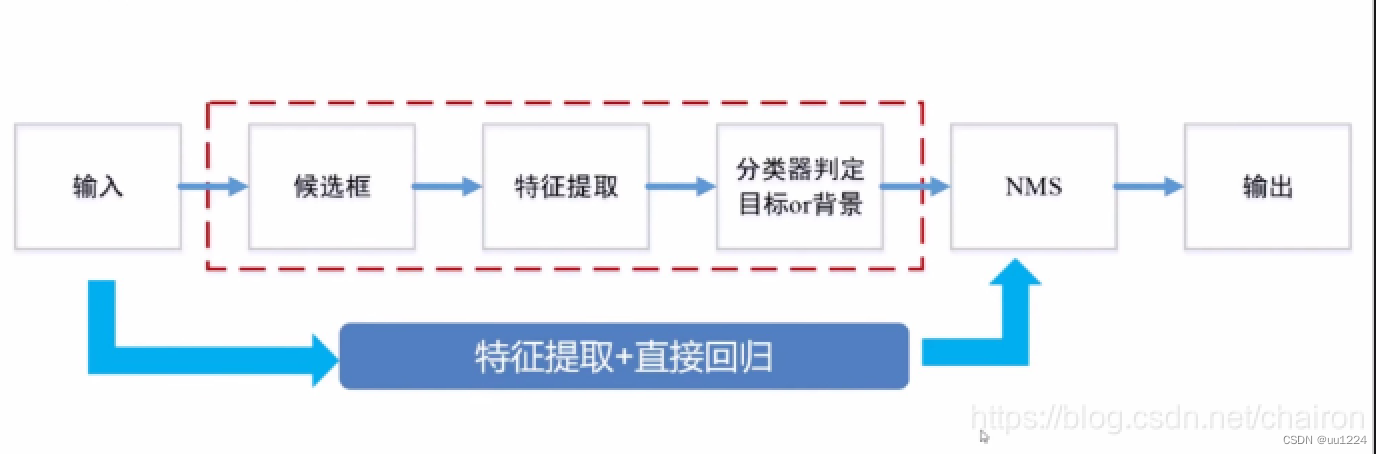
目标检测一般包括以下步骤: 候选区域生成:使用一些候选区域生成算法,生成可能包含目标的区域。 特征提取:对每个候选区域提取特征,如颜色、纹理、形状等。 目标分类:使用机器学习或深度学习算法,将每个候选区域分类为目标或非目标。 边界框回归:对于被分类为目标的候选区域,通过回归算法校正其边界框的位置和大小。 非极大值抑制(NMS):对于多个重叠的候选区域,保留具有最高置信度的目标,去除冗余的区域
目标检测可以分为:
1. One-Stage目标检测:端到端,速度快。(YOLO、YOLOX)
2.Two-Stage目标检测:速度更慢,最开始提出。(SSD、R-CNN、Faster R-CNN)
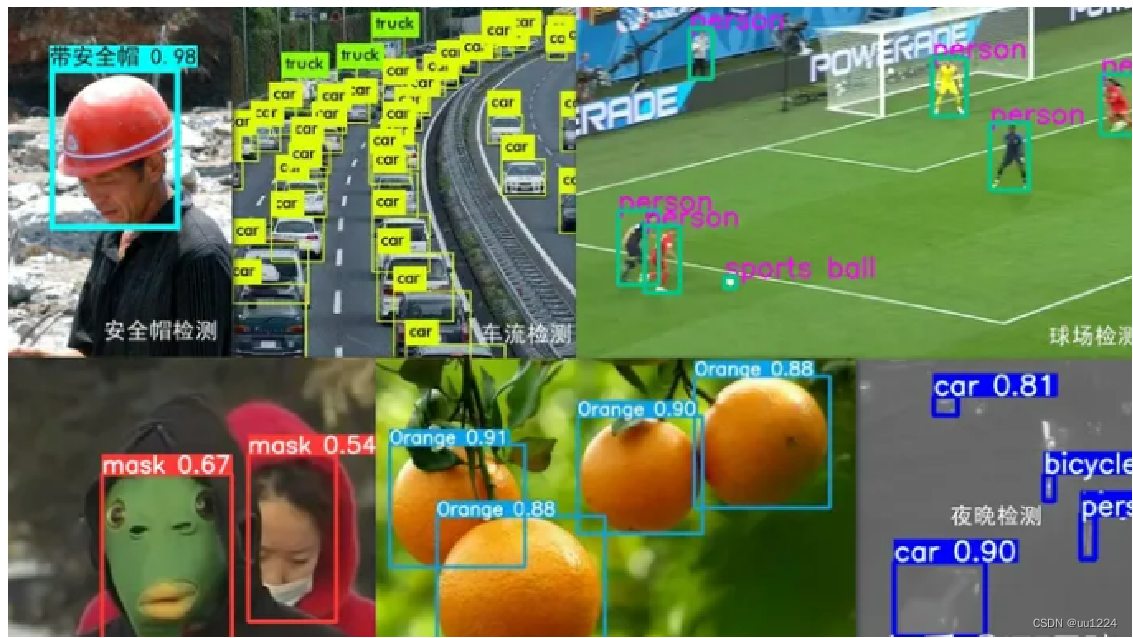
目标检测应用
目标检测是机器视觉领域最主要的应用之一,例如,汽车违规行驶的检测会为了保障行车、行人的安全在路口安装交通检测系统,检测汽车的行驶速度是否超过限制、是否存在违规变道行为、是否存在闯红灯行为、是否遮挡车牌、是否系安全带等。 而人工检测存在着较多的弊端,如准确率低,长时间工作准确性更是无法保障,而且检测速度慢,容易出现错判和漏判。 因此,机器视觉在目标检测的应用方面也就显得非常重要。
目标检测算法既可以进行分类任务,也可以进行检测任务,还可以进行目标追踪、实例分割。 YOLO系列:YOLOv1~YOLOv8、YOLOX、YOLOF是最常用的目标检测算法。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









