







1 在流水线上使用工业相机对板擦进行拍照时,触发方式选择内触发还是外触发?
触发方式的选择(内触发或外触发)主要取决于流水线速度、检测精度需求和系统同步性要求。以下是详细分析:
1.外触发(外部触发)
工作原理:通过外部传感器(如光电传感器、编码器或PLC)检测板擦到达拍照位置,实时发送电信号给相机,触发拍照。触发信号与流水线运动完全同步,确保每张照片捕捉的物体位置一致。
适用场景:高速流水线(如每分钟处理数百个板擦):外触发可精准匹配流水线速度,避免漏拍或重复拍摄。位置精度要求高的检测(如尺寸测量、缺陷定位):确保每次拍照时板擦处于固定位置。多设备协同(如机械臂抓取、多相机联动):外触发可实现全系统同步。
2.内触发(内部触发/自由运行)
工作原理:相机按固定频率(如每秒30帧)自主拍照,不依赖外部信号。通常配合图像后处理算法筛选有效图像(如通过ROI区域检测板擦是否存在)。
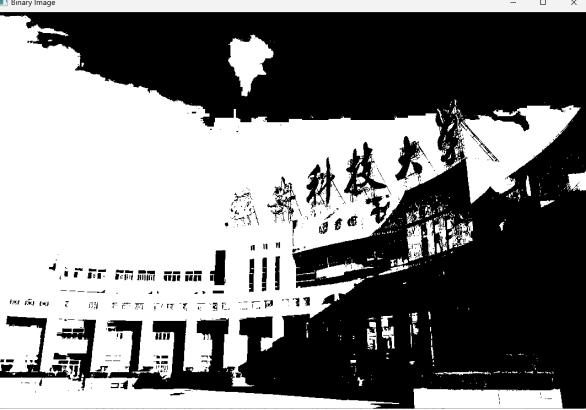
2灰度图像二值化
2.1什么是图像二值化?
图像二值化,就是将图像中像素点的值取其中间值,若大于中间值,则将该像素点的值设为最大值,若小于中间值,则把该像素点设为最小值。使整个图片最后只存在两个值:最大值和最小值。
2.2 python程序实现
import cv2
def convert_gray_to_binary(image_path):
# 读取灰度图像
gray_image = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
if gray_image is None:
print("无法读取图像,请检查图像路径。")
return
# 使用阈值处理将灰度图像转换为二值图像
_, binary_image = cv2.threshold(gray_image, 127, 255, cv2.THRESH_BINARY)
return binary_image
if __name__ == "__main__":
image_path = 'image.jpg' # 替换为你的图像路径
binary_image = convert_gray_to_binary(image_path)
if binary_image is not None:
# 显示二值图像
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()2.3 结果显示
3均值滤波实现
3.1均值滤波原理
均值滤波是一种常用的线性图像滤波方法,主要用于平滑图像、抑制噪声。其核心原理是通过局部邻域内像素的平均值来替代中心像素值,从而减少噪声或细节的强度。
1.基本原理:对图像中的每个像素,取其周围一定邻域内所有像素值的算术平均值,作为该像素的新值。噪声(如高斯噪声)通常是随机分布的,通过平均操作可以削弱噪声强度,因为噪声的极值会被邻域内其他像素的典型值“中和”。图像的高频细节(如边缘、纹理)会被模糊,属于低通滤波。均值滤波通过局部平均实现去噪,但以牺牲图像清晰度为代价。在实际应用中需权衡噪声抑制与细节保留,通常结合其他方法(如自适应滤波)优化效果。
3.2算法实现
import cv2
import matplotlib.pyplot as plt
def mean_filtering(image_path):
# 读取图像
image = cv2.imread(image_path)
if image is None:
print("无法读取图像,请检查图像路径。")
return
# 将BGR格式转换为RGB格式,以便使用matplotlib显示
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# 进行均值滤波
filtered_image = cv2.blur(image, (5, 5))
# 绘制滤波前后的图像
plt.figure(figsize=(10, 5))
plt.subplot(1, 2, 1)
plt.imshow(image)
plt.title('Original Image')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(filtered_image)
plt.title('Filtered Image')
plt.axis('off')
plt.show()
if __name__ == "__main__":
image_path = 'image.jpg' # 替换为你的图像路径
mean_filtering(image_path)3.3实验结果



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









