







 双目视觉系统通过计算图像视觉差获取物体深度信息,解决了二维坐标无法满足的空间环境需求。然而,这带来了更大的计算量和对精确配准的挑战,如镜头误差可能导致调校复杂度增加和结果不确定性。
双目视觉系统通过计算图像视觉差获取物体深度信息,解决了二维坐标无法满足的空间环境需求。然而,这带来了更大的计算量和对精确配准的挑战,如镜头误差可能导致调校复杂度增加和结果不确定性。
机器视觉的高速发展,但是对于制造业来说并不满足于此,为了获取目标物体的深度信息,行业产生了双目视觉系统,顾名思义,就是基于人类双眼引发的一种生态检测系统,单目检测的方式,可以帮助我们快速确定一个物体的平面坐标信息,但是在生产的过程中,往往我们是处于空间环境中,二维坐标远远不能满足我们的需求。起先在没有双目视觉系统介入时,为了满足产线需求,我们会将多个视觉系统进行集成。
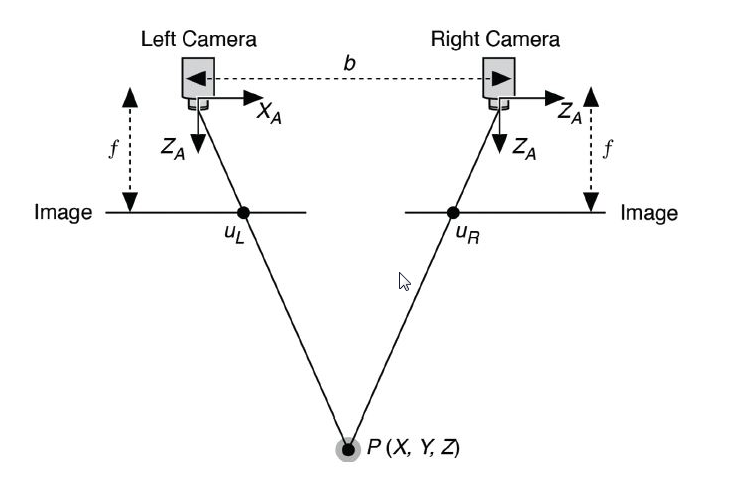
要想了解双目视觉,我们首先来看看其基本工作原理,在项目上,我们通过对获取的两张图像视觉差进行计算,获取到前方目标物体的距离,再通过对被检测产品的算法对图像进行处理,这里我们遇到第一个难题便是,整个计算量相对比于单目视觉产生了巨大提升,对计算机提出了更高的要求,致使整体落地实现双目的计算难度提高了不少。另一方面便是整个视觉系统的配准问题,虽然我们可以在测距的过程中,可以采取立体匹配算法,但是在实际的应用中,我们要求两个镜头之间的误差无限小,比如如果我们的镜头如果有5%的误差,那么对于后期的调校算法,会增加很多了,这也给结果带了很大的不确定性。以上就是盈泰德带来的内容


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









