 高校新闻管理系统开发的全面分析:技术、经济和社会可行性,
高校新闻管理系统开发的全面分析:技术、经济和社会可行性,




 本文详细探讨了高校新闻管理系统在技术(采用ASP.NET和SQL2005)、经济(成本效益分析,开源免费)和社会可行性(符合政策法规,操作便捷)方面的特点。文章还涉及了系统流程、硬件配置、软件环境以及数据库设计,强调了B/S结构和E-R图在系统设计中的重要性。
本文详细探讨了高校新闻管理系统在技术(采用ASP.NET和SQL2005)、经济(成本效益分析,开源免费)和社会可行性(符合政策法规,操作便捷)方面的特点。文章还涉及了系统流程、硬件配置、软件环境以及数据库设计,强调了B/S结构和E-R图在系统设计中的重要性。
https://www.bilibili.com/video/BV1j1421Q74C/
演示视频:
3.1可行性分析
技术可行性:计算机配置较高,有足够的空间可以安装运行平台、数据库和各类编程工具,在编程环境上提供了可靠的支持;在编程人员方面,可以运用以前所学的各种开发软件的计算机知识和管理知识,加上不断的学习,为系统的开发提供了必要的技术保障;
社会可行性:目前已有很多成功新闻网站的先例。高校新闻管理系统的开发和运行与国家的政策法规不存在任何冲突和抵触之处。另外,高校新闻管理系统所采用的操作和工作方式符合工作人员的日常习惯,而且操作方便灵活,便于管理。具有可行性;
经济可行性:本系统主要采用ASP.NET开发,免费,开源,登入高校新闻管理系统即可进行操作,使用方便快捷;
3.1.1 技术可行性
技术可行性是最难决断和最关键的问题。根据客户提出的系统功能、性能及实现系统的各项约束条件,从技术的角度研究系统实现的可行性。本系统采用的是.NET家族的ASP.NET技术和ADO.NET 技术。众所周知,.NET现在已经日趋成熟、稳定,被认为是计算机领域最有前途的技术之一。同时数据库采用的是SQL2005。将ASP.NET,ADO.NET以及SQL2005结合起来开发一套高校新闻管理系统,必定是可行并且高效的。
3.1.2 经济可行性
经济可行性研究主要进行成本效益分析,包括估计项目的开发成本,估算开发成本是否会高于项目预期的全部利润。看软件所能带来的经济效益与开发设计所需要的投资相比,是否相适宜,同时还要看此软件能否真正给用户带来足够的经济效益,我们开的这套系统正是考虑为用户提高工作效率,节省工作时间,方便操作与管理而设计。本系统的开发在经济上是完全可行的。开发此软件不需要大量的经费,而且是个人独立设计的,可以节省许多费用,同时也可提高个人的实际动手能力。
估算新系统的成本效益分析,其中包括估计项目开发的成本,开发费用和今后的运行、维护费用,估计新系统将获得的效益,估算开发成本是否会高于项目预期的全部经费。
3.1.3 操作可行性
由于现在的科技的飞速发展,计算机早已普及世界的方方面面,便利的科技条件,给人们带来优越的工作环境,这也使人们对工作效率及可操作性都有了更高的要求。因此,管理形式的计算机是社会发展的必然趋势,各种智能化的软件层出不穷,减少了原来人工操作的费时费力的状况,从而提高了工作效率和准确度。本系统用户平台直接面向学生和系统的管理人员,界面简单、明了,采用可视化界面,普通用户只需用鼠标和键盘就可以查看信息。由于该系统的操作简便、易懂,对于初次使用此系统的用户,不必经过复杂的培训和学习就可以掌握系统的操作流程。由此可见,开发此软件在操作上是可行的。
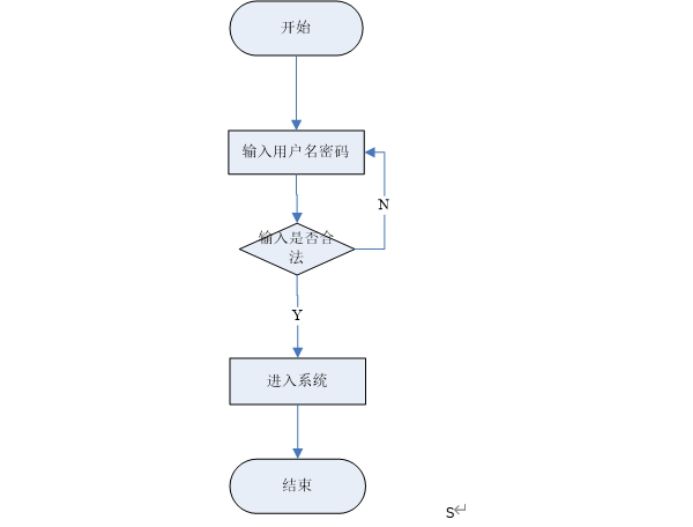
3.2系统流程和逻辑
 s
s
图3-3登录流程图
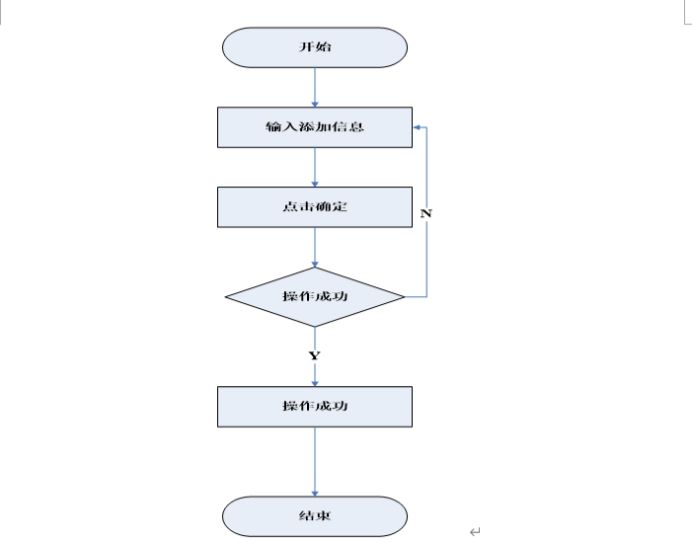
图3-4添加信息流程图
3.4计算机软硬件配置和开发平台
3.4.1计算机系统硬件配置
主板:技嘉GA-G31M-S2C
CPU: Intel奔腾双核E5300(盒)
内存:威刚2GB DDR2 80
硬盘:希捷320GB
光驱:先锋DVR-117CH
显卡:集成Intel GMA 3100显卡
声卡:集成Realtek ALC8838声卡
网卡:集成AR8132百兆网卡
显示器:优派19寸LED显示器
3.4.2计算机系统软件配置
操作系统:Microsoft Windows XP Professional
安装软件:Microsoft Office 2003
金山词霸2010
Adobe Acrobat 10.0 Professional
瑞星杀毒软件防火墙组合版
Internet Explorer 8.0
VS2005+SQL2005
3.4.3编程环境与工具
本管理信息系统采用Microsoft Windows XP Professional SP3作为操作系统平台。
本系统在开发时选用了稳定性较强的Windows XP中文专业版和C#作为开发语言,同时选项用了SQL2005数据库,由于这些软件产品都是Microsoft公司的产品,因此彼此之间的兼容性较好,开发出的应用系统稳定性较高。
VS2005具有可视化的开发环境,可以快速完成系统的开发,内部集成的数据访问通道,使得可以轻松方便的对数据库进行管理。
数据库采用Microsoft SQL2005,要据我们的系统要求,采用它完全可适合我们的工作需求,并且它所支持的类型十分丰富,维护简便,费用比较低,对使用人员的素质要求不是很高,容易升级。
4系统概要设计
3.1 概述
本系统采用B/S结构(Browser/Server,浏览器/服务器结构)和基于Web服务两种模式,是一个适用于Internet环境下的模型结构。只要用户能连上Internet,便可以在任何时间、任何地点使用。系统工作原理图如图3-1所示:
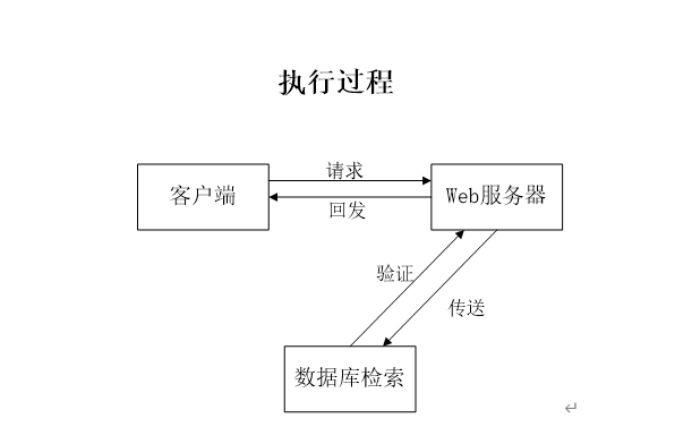
图3-1 系统工作原理图
3.2 系统结构
本系统是基于B/S架构的网站系统,本系统的具体功能如下:
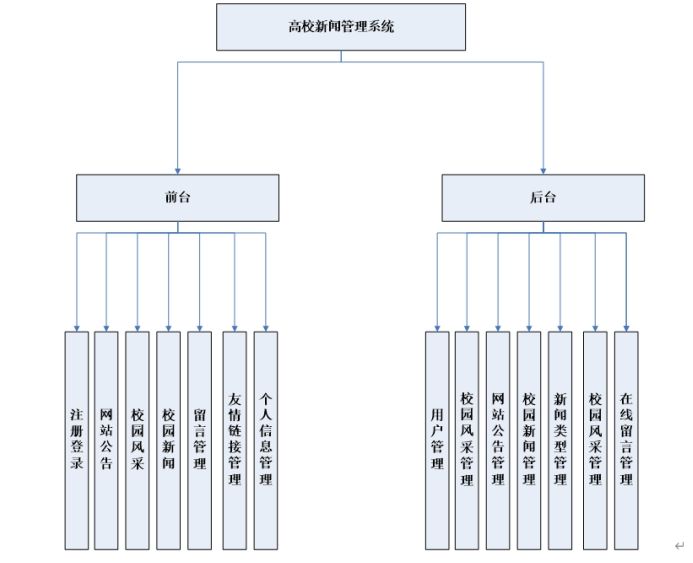
图3-2系统功能结构图
3.3. 数据库设计
4.3.1 数据库E-R图
概念模型的设计是为了将现实世界信息进行抽象,实现信息世界的建模,是进行数据库设计的有力工具。数据库概念模型设计可通过E-R图来描述现实世界的概念模型。本系统的E-R图表现了系统中各个实体之间的联系
4.3.2 数据库实体
概念设计的目标是设计出反映某个组织部门信息需求的数据库系统概念模式,数据库系统的概念模式独立于数据库系统的逻辑结构、独立于数据库管理系统(DBMS)、独立于计算机系统。
概念模式的设计方法是在需求分析的基础上,用概念数据模型(例如E-R模型)表示数据及数据之间的相互联系,设计出反映用户信息需求和处理需求的数据库系统概念模式。概念设计的目标是准确描述应用领域的信息模式,支持用户的各种应用,这样既容易转换为数据库系统逻辑模式,又容易为用户理解。数据库系统概念模式是面向现实世界的数据模型,不能直接用于数据库系统的实现。在此阶段,用户可以参与和评价数据库系统的设计,从而有利于保证数据库系统的设计与用户的需求相吻合。在概念模式的设计中,E-R模型法是最常见的设计方法。本系统的E-R图如下图所示:
管理员属性图如图3-3所示。
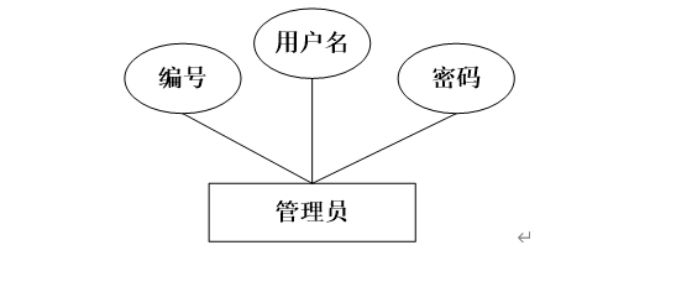
图3-3管理员属性ER图
网站公告属性图如图3-4所示。

图3-4网站公告属性ER图
新闻信息属性图如图3-5所示。

图3-5新闻信息属性ER图
校园风采信息属性图如图3-6所示。
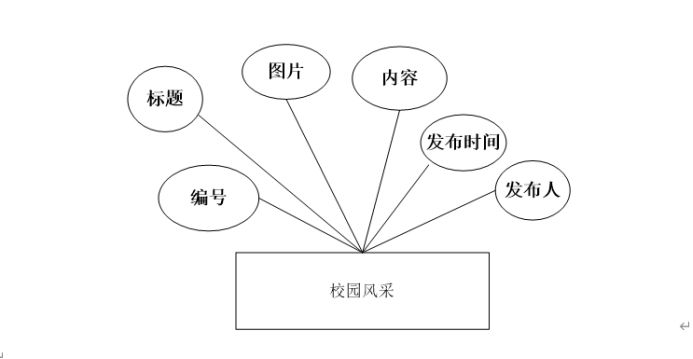
图3-6校园风采信息属性ER图

















 427
427

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









