




 该博客介绍了LogFile类,包括日志滚动机制、成员变量的详细解释以及一个使用示例。成员变量如basename_、rollSize_等用于控制日志文件的滚动和写入。在LogFile_test.cc的示例中,展示了如何初始化和操作LogFile对象,进行日志写入。
该博客介绍了LogFile类,包括日志滚动机制、成员变量的详细解释以及一个使用示例。成员变量如basename_、rollSize_等用于控制日志文件的滚动和写入。在LogFile_test.cc的示例中,展示了如何初始化和操作LogFile对象,进行日志写入。
1. 日志滚动

2. 成员变量
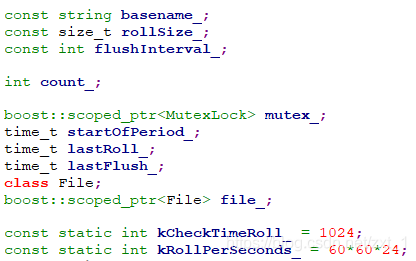
basename_:~/Documents/build/release-cpp11/bin 的basename为 bin
rollSize_:文件大小达到rollSize_时,换一个文件
flushInterval_:写入时间间隔
count_:计数器
startOfPeriod_:开始写入的时间,调整为当天零点(原因:比较是否是第二天)
lastRoll_:上次滚动日志文件时间
lastFlush:上次写入文件时间

3. 使用示例 LogFile_test.cc
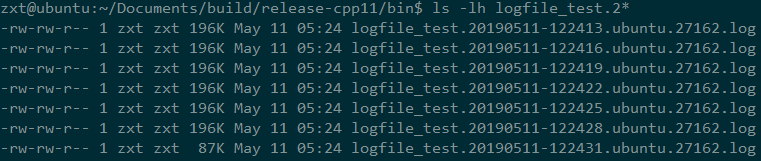
运行结果:
- 将文件所在路径名拷贝到name数组里:./logfile_test
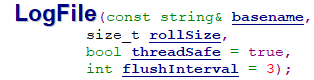
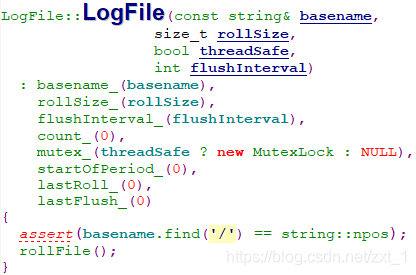
- 根据basename,rollSize初始化一个LogFile对象,其中basename为logfile_test,rollSize大小为196K,LogFile构造函数如下:
- 设置其输出方式 outputFunc,其定义如下:
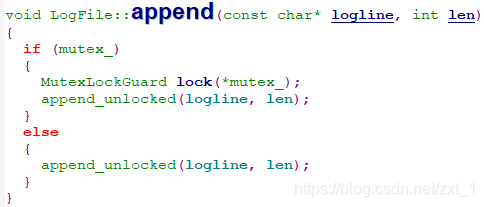
append()函数定义如下:
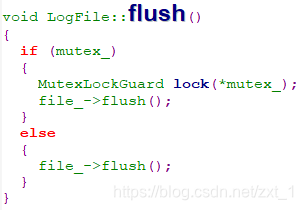
- 设置其 flush 方式,其定义如下:
其中 file_ 类型为指向File类的智能指针
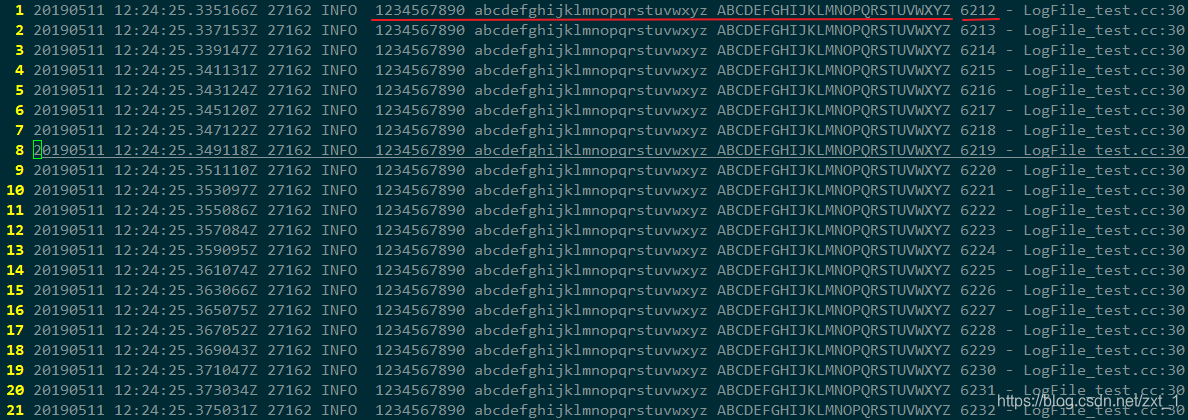
- 向文件中写入10000次,写入内容为line + i
打开其中一个log日志,部分内容如下:





















 503
503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









