







 本文探讨了如何通过模板元编程减少代码膨胀,特别是针对固定尺寸的正方形矩阵模板类。介绍了如何利用非类型模板参数和类型参数来优化代码,并提供了一个具体的实现案例。
本文探讨了如何通过模板元编程减少代码膨胀,特别是针对固定尺寸的正方形矩阵模板类。介绍了如何利用非类型模板参数和类型参数来优化代码,并提供了一个具体的实现案例。
假设你想为固定尺寸的正方矩阵编写一个模板,该矩阵的性质之一是支持逆矩阵运算:
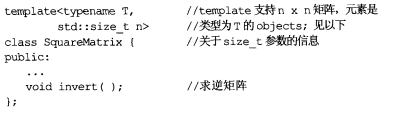
这个模板接受一个类型参数T和非类型参数size_t。然后调用方法:
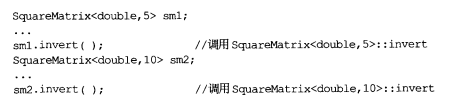
很明显,上面会具现化两份代码:处理常量5和10,其余部分都相同。这很可能造成代码膨胀。
为解决代码膨胀的问题,你会本能为它们建立一个带数值参数的函数:
template<typenamae T> // 与尺寸无关的基类
class SquareMatrixBase{
protected:
void invert(std::size_t matrixSize);
};
template<typename T, std::size_t n>
class SquareMatrix : private SquareMatrixBase<T>{
private:
using SquareMatrixBase<T>::invert; // 避免遮掩基类的invert
public:
void invert(){this->invert(n);} //inline调用基类版的invert。这里必须是this->
}
如上,SquareMatrixBase只对“矩阵元素对象的类型”参数化,不对矩阵的尺寸参数化。因此对于某给定元素类型,所有矩阵共享同一个SquareMatrixBase类
SquareMatrixBase::invert只是企图成为“避免派生类代码重复”的一种方法,所以它用protected替换public。调用它而造成的额外成本应该是0(因此派生类的invert调用基类版本的invert时是inline调用)。这里函数使用this->,否则模板化基类的函数名称会被派生类掩盖。注意这里是private继承,说明了这里的基类只是为了帮助派生类的实现,不是为了表现SquareMatrixBase和SquareMatrix 的is-a关系。
目前为止一切都好,但还有一些问题没有解决:
- SquareMatrixBase::invert如何知道该操作什么数据?
- 虽然它从参数中知道矩阵尺寸,但它如何知道哪个矩阵的数据在哪儿?想必只有派生类知道。
- 派生类如何联络其基类做逆运算动作?
方法:令SquareMatrixBase存储一个指针,指向矩阵数值所在的内存
template<typename T>
class SquareMatrixBase{
protected:
SquareMatrixBase(std::size_t n, T *pMem)
: size(n), pData(pMem){};
void setDatePtr(T* ptr)(pData = ptr;)
private:
std::size size; // 矩阵的大小
T* pDate; // 指向矩阵内容
};
这允许派生类决定内存分配方式
template<typename T, std::size_t n>
class SquareMatrix : private SquareMatrixBase<T>{
public:
SquareMatrix() : SquareMatrixBase<T>(n, data);
private:
T data[n * n];
}
这类类型的对象不需要动态分配内存,但对象自身可能非常大。另一种做法是把每一个矩阵的数据放进heap
template<typename T, std::size_t n>
class SquareMatrix : private SquareMatrixBase<T>{
public:
SquareMatrix () :
SquareMatrixBase<T>(n, 0), //将基类的数据指针设为null
pData(new T[n * n]) // 为矩阵内容分配内存, 将指向该内存的指出存储起来
{this->setDataPtr(pData.get();)}
private:
boost::scoped_array<T>pData;
这个条款只讨论由non-type template parameters(非类型模板参数)带来的膨胀,其实type parameters (类型参数)也会导致膨胀。
- 比如在很多平台上,int和long有相同的二进制表述,所以vector< int>和vector< long>的成员函数可能完全相同。
- 同样的,大多数平台上,所有指针类型都有相同的二进制表述,因此凡模板持有指针者(比如list< int*>、list< const int *>等)往往应该对每一个成员使用唯一一份底层实现。
- 也就是说,如果你实现成员函数而它们操作强类型指针(T*),你应该令它们调用另一个无类型指针(void *)的函数,由后者完成实际工作。
请记住:
- 模板生成多个类和多个函数,所以任何模板代码都不应该与某个造成膨胀的模板参数产生相依关系
- 因非类型模板参数而造成的代码膨胀,往往可以消除,做法是以函数函数或者类成员变量替换模板参数
- 因类型参数而造成的代码膨胀,往往可以降低,做法是让带有完全相同二进制表述的具现类型共享实现码

















 2252
2252

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









