




 本文深入解析Docker镜像的分层特性及容器读写层的工作机制,包括写时复制与用时配置技术,同时介绍了Docker支持的各种存储驱动程序及其选择建议。
本文深入解析Docker镜像的分层特性及容器读写层的工作机制,包括写时复制与用时配置技术,同时介绍了Docker支持的各种存储驱动程序及其选择建议。
首先了解Docker镜像的分层
镜像的分层特性
在说docker的文件系统之前,我们需要先想清楚一个问题。我们知道docker的启动是依赖于image,docker在启动之前,需要先拉取image,然后启动。多个容器可以使用同一个image启动。那么问题来了:这些个容器是共用一个image,还是各自将这个image复制了一份,然后各自独立运行呢?
我们假设每个容器都复制了一份这个image,然后各自独立运行,那么就意味着,启动多少个容器,就需要复制多少个image,毫无疑问这是对空间的一种巨大浪费。事实上,在容器的设计当中,通过同一个Image启动的容器,全部都共享这个image,而并不复制。那么问题又随之而来:既然所有的容器都共用这一个image,那么岂不是我在任意一个容器中所做的修改,在其他容器中都可见?如果我一个容器要将一个配置文件修改成A,而另一个容器同样要将这个文件修改成B,两个容器岂不是会产生冲突?
我们把上面的问题放一放,先来看下面一个拉取镜像的示例:
上面的示例是从docker官方镜像仓库拉取一个nginx:latest镜像,可以看到在拉取镜像时,是一层一层的拉取的。事实上镜像也是这么一层一层的存储在磁盘上的。通常一个应用镜像包含多层,如下:
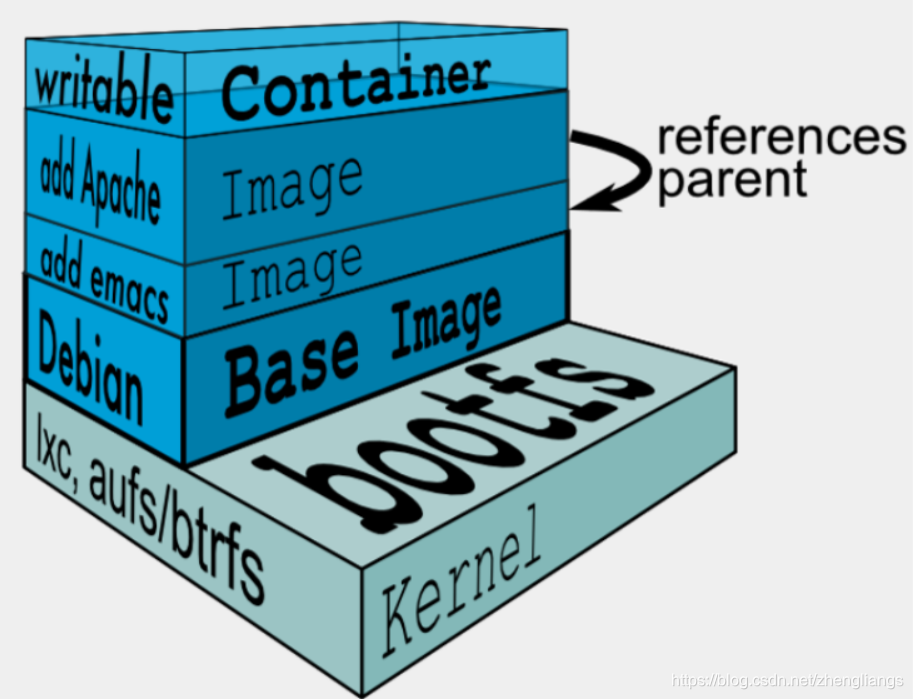
我们首先需要明确一点,镜像是只读的。每一层都只读。在上图上,我们可以看到,在内核之上,最底层首先是一个基础镜像层,这里是一个ubuntu的基础镜像,因为镜像的只读特性,如果我们想要在这个ubuntu的基础镜像上安装一个emacs编辑器,则只能在基础镜像之上,在构建一层新的镜像层。同样的道理,如果想要在当前的emacs镜像层之上添加一个apache,则只能在其上再构建一个新的镜像层。而这即是镜像的分层特性。
容器读写层的工作原理
我们刚刚在说镜像的分层特性的时候说到镜像是只读的。而事实上当我们使用镜像启动一个容器的时候,我们其实是可以在容器里随意读写的,从结果上看,似乎与镜像的只读特性相悖。
我们继续看上面的图,其实可以看到在镜像的最上层,还有一个读写层。而这个读写层,即在容器启动时为当前容器单独挂载。每一个容器在运行时,都会基于当前镜像在其最上层挂载一个读写层。而用户针对容器的所有操作都在读写层中完成。一旦容器销毁,这个读写层也随之销毁。
知识点: 容器=镜像+读写层
而我们针对这个读写层的操作,主要基于两种方式:写时复制和用时分配。
写时复制
所有驱动都用到的技术——写时复制(CoW)。CoW就是copy-on-write,表示只在需要写时才去复制,这个是针对已有文件的修改场景。比如基于一个image启动多个Container,如果为每个Container都去分配一个image一样的文件系统,那么将会占用大量的磁盘空间。而CoW技术可以让所有的容器共享image的文件系统,所有数据都从image中读取,只有对文件修改时(在构建镜像或运行容器时),才从image里把要写的文件复制到可写层进行修改。所以无论有多少个容器共享同一个image,所做的写操作都是对从image中复制到自己的文件系统中的复本上进行,并不会修改image的源文件,且多个容器操作同一个文件,会在每个容器的文件系统里生成一个复本,每个容器修改的都是自己的复本,相互隔离,相互不影响。使用CoW可以有效的提高磁盘的利用率。
用时配置
用时分配是用在原本没有这个文件的场景,只有在要新写入一个文件时才分配空间,这样可以提高存储资源的利用率。比如启动一个容器,并不会为这个容器预分配一些磁盘空间,而是当有新文件写入时,才按需分配新空间。
Docker支持以下存储驱动程序
- OverlayFS
- AUFS
- device mapper
- Btrfs
- ZFS
- VFS
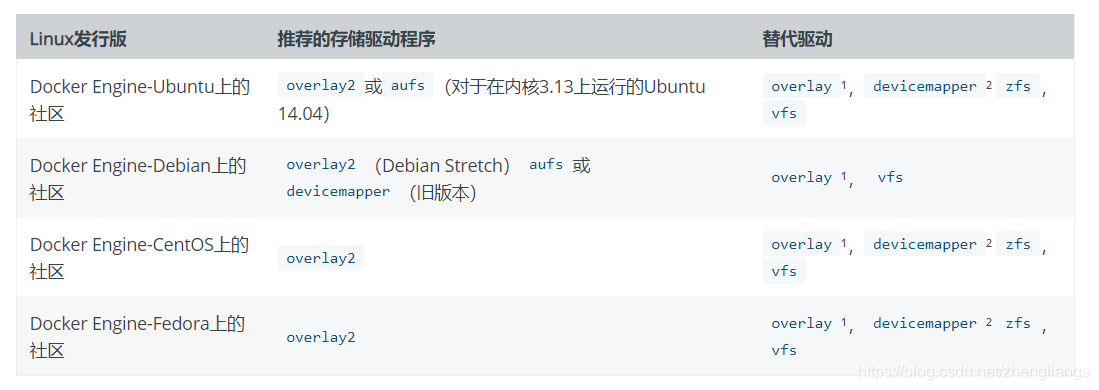
选择合适的存储驱动
- 对于当前支持的所有Linux发行版,overlay2是首选的存储驱动程序,并且不需要额外的配置。
- aufs是Docker 18.06和更老版本的首选存储驱动程序,当运行在Ubuntu 14.04的内核3.13上时,它不支持overlay2。。
- devicemapper支持,但direct-lvm对于生产环境是必需的,虽然loopback-lvm零配置,但是性能很差。devicemapper是CentOS和RHEL的推荐存储驱动程序,因为它们的内核版本不支持overlay2。但是,当前版本的CentOS和RHEL现在支持overlay2,这是推荐的驱动程序。
- 如果btrfs和zfs驱动程序是后备文件系统(安装了Docker的主机的文件系统),则使用它们。这些文件系统允许使用高级选项,例如创建“快照”,但需要更多的维护和设置。这些中的每一个都依赖于正确配置的后备文件系统。
- vfs存储驱动程序用于测试目的,以及无法使用写时复制文件系统的情况。此存储驱动程序的性能很差,通常不建议在生产中使用。
¹)overlay存储驱动程序已在Docker Engine-Enterprise 18.09中弃用,并将在以后的版本中删除。建议将overlay存储驱动程序的用户迁移到overlay2。
²)devicemapper存储驱动程序已在Docker Engine 18.09中弃用,并将在以后的版本中删除。建议将devicemapper存储驱动程序的用户迁移到overlay2。
如果可能,建议使用overlay2作为存储驱动程序。第一次安装Docker时,默认使用的是overlay2。以前,aufs在可用时是默认使用的,但现在不再是这样了。如果您希望在新的安装上使用aufs,那么需要显式地配置它,并且可能需要安装额外的包,比如linux-image-extra。
在使用的现有安装中aufs,它仍然被使用。

















 1244
1244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









