





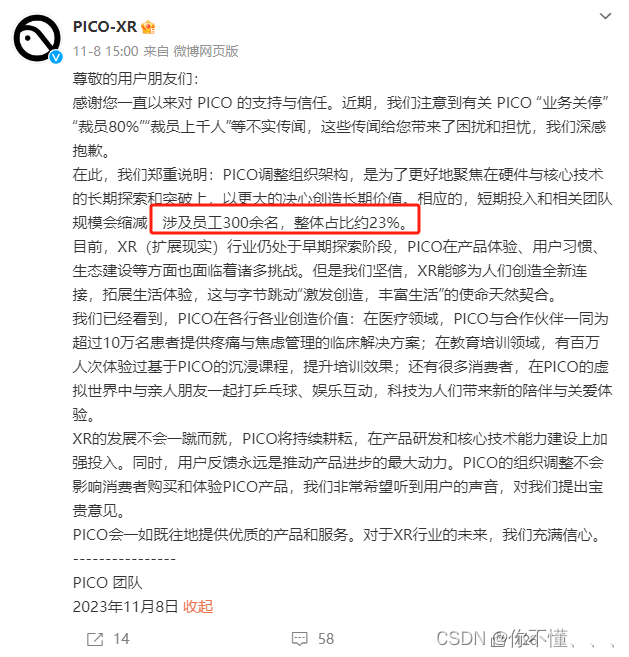
前段时间,字节跳动旗下XR公司PICO宣布“优化”的消息在网上引发了热议。当时PICO宣布进行组织架构调整,以便更好地聚焦在硬件与核心技术的长期探索和突破。整体优化300人,比例达到23%。
这不就在前几天,字节跳动的朝夕光年裁员实锤,这件事其实传了有几周了。
字节也早有准备,沟通前就封锁了天台。

中午,开部门会议,leader确认裁员事实,等 hr 拉会沟通。
据悉,这次裁员的赔偿为"N+1",同时年终奖、股权等也将进行折算。
"分手费"倒是很可观,而各家游戏公司的 HR 也做好了抢人的准备。
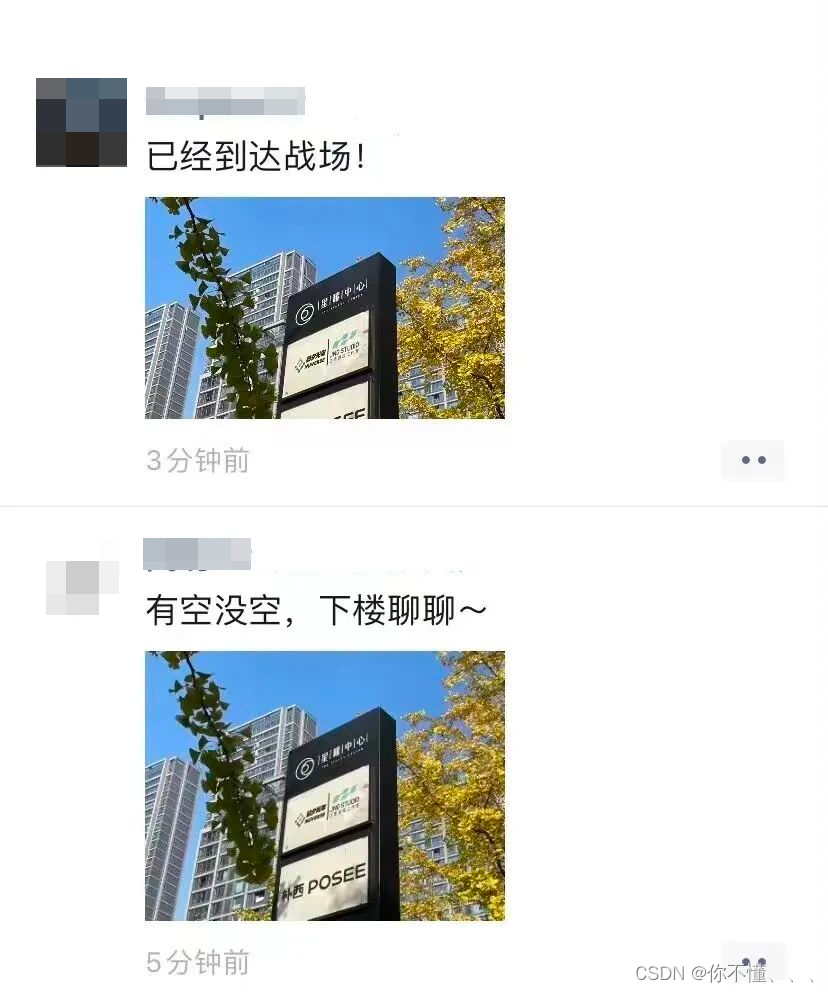
下午,纷纷到达"战场",出现了各种疯狂的一幕。
天美,第一时间占领字节,拉上横幅:

HR 们占领楼下:
大概 2 周前,海外媒体传字节想把沐瞳卖了,这么优质的游戏资产也卖,整个游戏部门也就都危险了。
果然,迎来了如今几千人的大裁员。
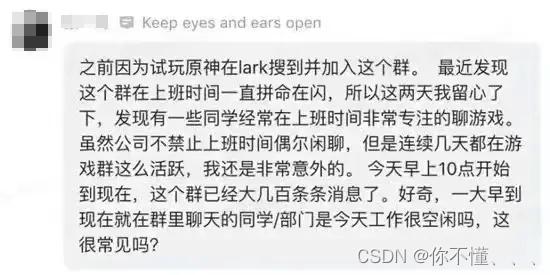
有网友调侃,字节游戏的命运早已注定:一切还要回到张一鸣进入飞书原神群那个下午。


















 1130
1130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











