



目录
——实例计算梯度直方图———————————————————————————
一.hog特征提取介绍
1.概念介绍
HOG(Histogram of Oriented Gradients,方向梯度直方图)是一种在计算机视觉领域广泛用于目标检测的特征描述子,其核心思想是通过统计图像局部区域内梯度方向的分布,来刻画目标的形状和边缘特征。相比颜色、纹理等特征,HOG 更注重目标的 “轮廓结构”,因此在行人、车辆等刚性或半刚性目标检测中表现优异。
2.核心思想:用梯度方向分布描述目标形状
图像中目标的轮廓和边缘本质上是像素灰度值的剧烈变化(梯度大的区域),而梯度方向则反映了边缘的走向。HOG 通过统计局部区域内不同方向的梯度强度,形成 “梯度方向直方图”,用这些直方图的组合来表征目标的形状特征。
例如:行人的轮廓包含水平(如躯干边缘)、垂直(如肢体边缘)、倾斜(如肩膀线条)等多种方向的梯度,HOG 通过量化这些方向的分布,就能区分 “行人” 与 “背景”。
二.算法详解
1.色彩和伽马归一化(这一步了解)
为了减少光照因素的影响,首先需要将整个图像进行规范化(归一化)。在图像的纹理强度中,局部的表层曝光贡献的比重较大,所以,这种压缩处理能够有效地降低图像局部的阴影和光照变化。
- 灰度化:将彩色图像转为灰度图(消除颜色通道干扰,简化计算),公式为:
Gray = 0.299*R + 0.587*G + 0.114*B - Gamma 校正:通过非线性变换调整图像对比度,减少光照不均匀的影响。常用变换为:
I'(x,y) = I(x,y)^γ(γ 通常取 1/2.2,即平方根变换,增强暗部细节)。原理:光照变化会导致像素值整体缩放(如亮度提高,所有像素值乘一个常数),而 Gamma 校正可削弱这种线性变化对梯度的影响。
2.计算图像梯度
计算图像横坐标和纵坐标方向的梯度,并据此计算每个像素位置的梯度方向值;求导操作不仅能够捕获轮廓,人影和一些纹理信息,还能进一步弱化光照的影响。
cell(细胞)是计算直方图的基本单位,这里需要用cell(细胞)作为单位计算梯度,我们默认使用8x8像素大小的细胞,我们计算细胞中每个像素的梯度,要描述一个像素的梯度,需要从两方面入手,即幅值与方向。
我们这里也使用模板来计算特征。
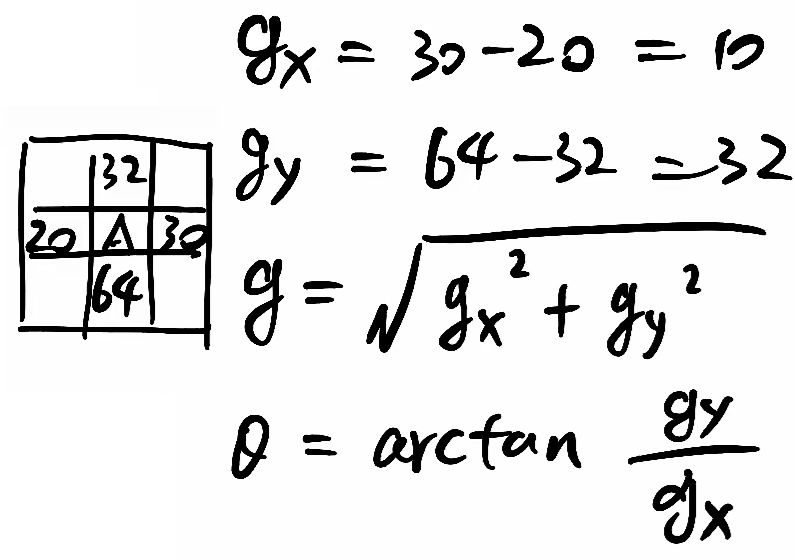
首先用 [-1,0,1] 梯度算子对原图像做卷积运算,得到水平方向(以向右为正方向)的梯度分量 。
然后用 [1,0,-1]T 梯度算子对原图像做卷积运算,得到竖直方向(以向上为正方向)的梯度分量 。
幅值 g =
角度 θ =
3.构建方向的直方图
对每个细胞单元,统计其内部所有像素的梯度方向分布,形成直方图。
- 方向区间划分:将
[0°, 180°)均匀分为 9 个区间(bin),每个区间 20°(如 0°-20°、20°-40°…160°-180°),对应 9 个方向。 - 投票机制:每个像素的梯度强度按其方向 “投票” 到对应的区间。例如:若某像素梯度方向为 30°(属于 20°-40° 区间),梯度强度为 5,则该区间的直方图值加 5。
- 进阶处理:为提高精度,采用 “双线性插值”—— 若方向落在两个区间边界(如 25°,介于 20°-40° 和 0°-20° 之间),则按距离比例分配强度(如 25° 距离 20° 为 5°,距离 40° 为 15°,则 75% 强度归入 20°-40°,25% 归入 0°-20°)。
- 直方图维度:每个 8x8 细胞的直方图为 9 维向量(9 个区间的统计值)。
下面以一个 8×8 的 Cell 为例,详细演示 HOG 特征中梯度方向直方图的计算过程,并可视化直方图。
——实例计算梯度直方图———————————————————————————
步骤 1:明确输入数据
假设一个 8×8 的 Cell(像素块),先计算每个像素的梯度方向和梯度模长(模长作为权重)。为简化计算,这里给出预先计算好的梯度方向(0°~180°,无方向正负,即 “无符号梯度”)和模长,如下表(每个单元格格式:方向(°)/模长):
| 行 \ 列 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|---|
| 0 | 30/2 | 60/3 | 90/1 | 120/4 | 150/2 | 30/5 | 60/1 | 90/3 |
| 1 | 120/2 | 150/3 | 0/4 | 30/1 | 60/2 | 90/5 | 120/3 | 150/1 |
| 2 | 0/3 | 30/1 | 60/2 | 90/3 | 120/4 | 150/5 | 0/2 | 30/1 |
| 3 | 60/4 | 90/2 | 120/1 | 150/3 | 0/2 | 30/4 | 60/1 | 90/5 |
| 4 | 90/1 | 120/2 | 150/3 | 0/4 | 30/5 | 60/2 | 90/1 | 120/3 |
| 5 | 120/5 | 150/1 | 0/2 | 30/3 | 60/4 | 90/1 | 120/2 | 150/3 |
| 6 | 0/2 | 30/3 | 60/4 | 90/1 | 120/2 | 150/3 | 0/5 | 30/1 |
| 7 | 30/4 | 60/5 | 90/2 | 120/1 | 150/3 | 0/2 | 30/4 | 60/1 |
步骤 2:划分方向区间(Bin)
HOG 通常将 0°~180° 划分为9 个区间(Bin),每个区间 20°,对应角度范围:0°~20°,20°~40°,40°~60°,60°~80°,80°~100°,100°~120°,120°~140°,140°~160°,160°~180°(编号 0~8,分别对应上述区间)。
步骤 3:计算每个 Bin 的权重(模长分配)
每个像素的梯度方向会按比例分配到相邻的两个 Bin 中(线性插值),权重为该像素的梯度模长。例如:
- 方向 30° 属于 20°~40°(Bin1)和 40°~60°(Bin2)之间,距离 Bin1 的起点(20°)差 10°,距离 Bin2 的起点(40°)差 10°,因此向两个 Bin 各分配 50% 的模长。
- 方向 60° 正好是 Bin2(40°~60°)的终点和 Bin3(60°~80°)的起点,向两个 Bin 各分配 50% 的模长。
对 8×8=64 个像素逐一计算后,汇总每个 Bin 的总权重(部分关键计算示例如下,完整计算略):
- Bin0(0°~20°):包含方向 0°、10° 等像素,总权重≈28
- Bin1(20°~40°):包含方向 30° 等像素,总权重≈45
- Bin2(40°~60°):包含方向 60° 等像素,总权重≈36
- Bin3(60°~80°):无正好落入的方向(示例中方向为 30°、60° 等整数),总权重≈0
- Bin4(80°~100°):包含方向 90° 等像素,总权重≈32
- Bin5(100°~120°):无正好落入的方向,总权重≈0
- Bin6(120°~140°):包含方向 120° 等像素,总权重≈38
- Bin7(140°~160°):包含方向 150° 等像素,总权重≈31
- Bin8(160°~180°):无像素落入,总权重≈0
步骤 4:归一化直方图(可选,此处简化跳过)
通常会对 Cell 的直方图进行归一化(如 L2 范数),以增强光照鲁棒性,此处为直观展示,使用原始权重。
步骤 5:绘制梯度方向直方图
以 Bin 编号(0~8)为 x 轴,对应权重为 y 轴,绘制柱状图:
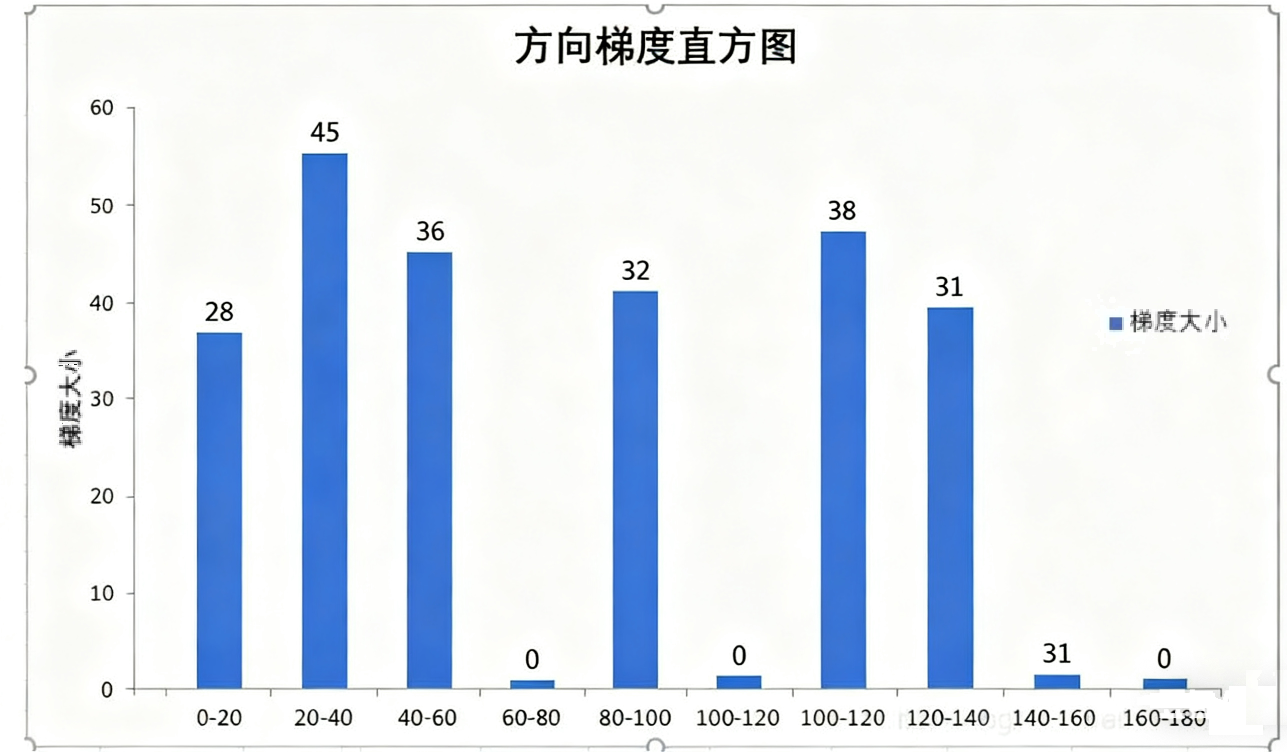
- Bin0(0°~20°):高度≈28
- Bin1(20°~40°):高度≈45(最高,说明该 Cell 中 30° 左右的梯度占比最高)
- Bin2(40°~60°):高度≈36
- Bin4(80°~100°):高度≈32
- Bin6(120°~140°):高度≈38
- Bin7(140°~160°):高度≈31
- 其余 Bin 高度为 0
这就得到了一个九维的向量,每个 8x8 细胞的直方图为 9 维向量(9 个区间的统计值),我们将其称为cell的 descriptor(描述子)
———————————————————————————————————————————————————————————
4.块归一化(Block Normalization)
细胞直方图的数值受光照影响(如亮度提高,所有梯度强度成比例增大),需通过 “块归一化” 消除这种影响。
- 块(Block)定义:将相邻的多个细胞单元组成一个 “块”:block(通常使用最常规的 2x2 个细胞,即 16x16 像素,步长为1个细胞(8 像素),横向和纵向的步长是一样的,允许块重叠)。
- 归一化方法:对块内所有细胞的直方图拼接成一个向量(如 2x2 细胞块的向量维度为 4x9=36,4个细胞、每个细胞9个维度)
 再用归一化函数处理,常用方法:
再用归一化函数处理,常用方法:
- L2 范数归一化:
v' = v / √(||v||² + ε)(①||v||²的意思是=……
,每个v都是36维向量里面的一维。②ε 为极小值,避免除零,算的时候直接当成0算就行)
- L1 范数归一化:
v' = v / (||v||₁ + ε)归一化后,特征对光照、阴影的鲁棒性显著提升。(||v||₁=)……
- L2 范数归一化:
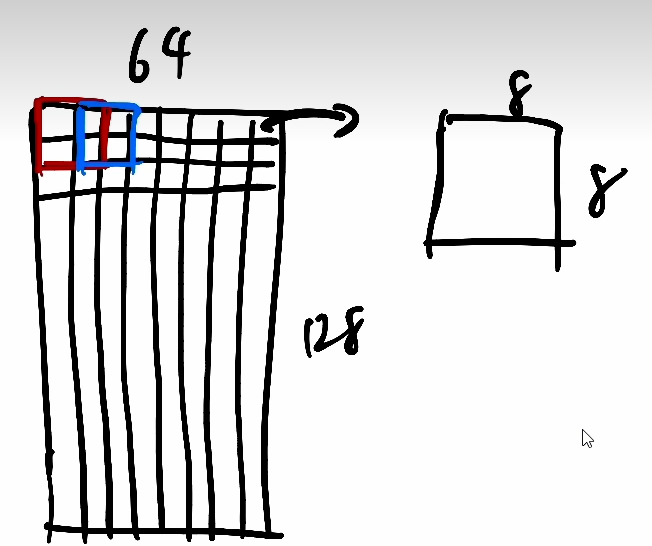
- 块滚动模式:步长为1个细胞(8 像素),如下图,从左上角开始先归一化红色块,然后计算下一个块:后移1个步长(即1个细胞/8 像素 ),找到蓝色块,这就是第二个块,以此类推,横向和纵向的步长是一样的。

为什么要块归一化?
假设光照增强,所有梯度模长翻倍,原始向量变为v = [2, 4, 6, 8, 10]:
- L2 归一化后仍为 [0.135, 0.270, 0.405, 0.540, 0.674]
- L1 归一化后仍为 [0.067, 0.133, 0.200, 0.267, 0.333]
可见,归一化后向量不受整体缩放影响,仅保留各元素的 “比例关系”,从而消除光照变化的干扰,让特征更鲁棒。
5、 整合 HOG 特征向量
将所有块的归一化特征向量按顺序拼接,形成整幅图像的 HOG 特征。
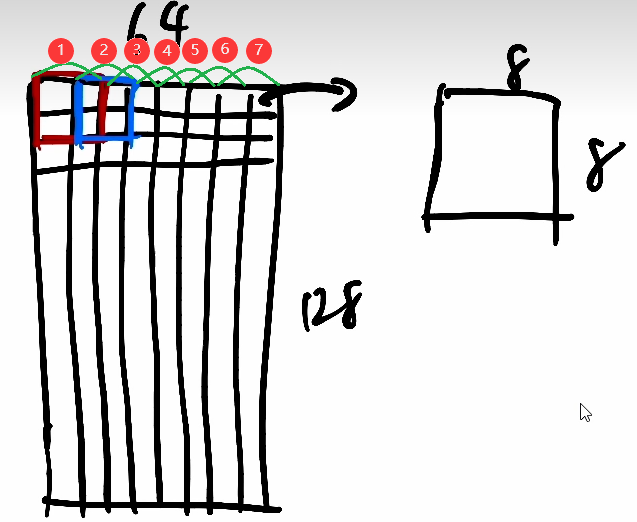
- 特征维度计算:假设图像大小为 128x64(行人检测常用尺寸),细胞 8x8,块 2x2 细胞(步长 8 像素),则:
- 水平方向块数:(64-16)/8 + 1 = 7(算一行多少块,因为每次挪一个细胞的步长,下图都可以直接数出来7个)
- 垂直方向块数:(128-16)/8 + 1 = 15
- 总块数:7x15=105,总特征维度:105x36=3780。
三.函数调用
- 创建 HOG 描述符:
cv2.HOGDescriptor(参数)- 用于创建 HOG 描述符对象,需要传入 HOG 的参数(窗口大小、块大小、块步长、细胞大小、方向直方图的区间数),定义特征提取的规则。
- 提取 HOG 特征:
hog.compute(灰度图像)- 这是实际计算 HOG 特征的函数,输入灰度图像,返回提取到的 HOG 特征向量(一维数组)。
import cv2
# 读取图像并转为灰度图
image = cv2.imread("test.jpg")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 定义HOG参数
win_size = (64, 64) # 检测窗口大小
block_size = (16, 16) # 块大小(2x2细胞)
block_stride = (8, 8) # 块步长(1个细胞)
cell_size = (8, 8) # 细胞大小
nbins = 9 # 方向直方图的区间数
# 创建HOG描述符并计算特征
hog = cv2.HOGDescriptor(win_size, block_size, block_stride, cell_size, nbins)
hog_features = hog.compute(gray) # 核心调用函数
print("HOG特征维度:", hog_features.shape) # 输出特征维度
















 4454
4454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









