



基于微控制器的光纤振动传感器采集与处理单元的开发
摘要
已开发出一种基于微控制器的采集与处理单元(MAPU),用于测量来自光纤振动传感器的振动信号。该MAPU采用32位ARM微控制器,对输入信号进行采集与处理。输入信号通过12位模数转换器(ADC)进行采集,并利用FFT方法进行处理以提取频率信息。通过对MAPU施加500赫兹的恒定输入信号持续29小时来表征其稳定性,结果表明MAPU能够稳定运行。为表征其频率响应特性,将输入信号以20赫兹间隔从20赫兹逐步变化至1000赫兹。特性表征结果表明,MAPU可检测20至1000赫兹范围内的输入信号,最小信号为4毫伏均方根。实验设置中,将MAPU与单模‐多模‐单模(SMS)光纤传感器结合使用,用于检测由木质平台上换能器引起的振动。实验结果表明,20至600赫兹的振动信号已被成功检测。由于实验中所用振动源的限制,600赫兹以上的振动信号未能被检测到。
引言
振动传感器广泛应用于工业、基础设施和环境监测等多个领域,用于检测和诊断故障,特别是在旋转机械[1]中。通过采用基于加速度传感器的振动传感机制,已开发出桥梁监测系统,以实现实时检测桥梁冲刷[2]。振动传感器还被用于滑坡预警系统[3]。
传统振动传感器通常基于压电技术,易受电磁干扰影响,而光纤振动传感器具有抗电磁干扰、重量轻和紧凑尺寸等优势[4]。光纤振动传感器可分为强度型、干涉仪型和光栅型[5]。由于结构简单,强度型振动传感器已得到广泛发展,其通过检测光功率变化来感知振动[6]。干涉仪型和光栅型传感器可提供更高的分辨率和精度,但需要复杂的结构和解调系统。光纤振动传感器可采用一种称为SMS结构的简单光纤结构实现,该结构由一段多模光纤(MMF)与输入单模光纤(SMF)和输出单模光纤(SMF)熔接而成[7]。
光纤振动传感器通常使用基于PC的数据采集系统(PC‐DAQ)或光谱分析仪(OSA)来采集振动信号并处理数据[1, 4, 8]。广泛用于处理振动信号的方法是快速傅里叶变换(FFT),该方法用于从时域记录的信号中提取振动频率[1, 4, 9]。由于基于PC的数据采集系统(PC‐DAQ)或光谱分析仪(OSA)的尺寸和复杂性,将其用于偏远地区的光纤振动传感器监测会增加实施难度。
本文开发了一种基于微控制器的采集与处理单元,用于光纤传感器。所开发的设备可采集并处理来自光纤传感器的振动信号。该设计方案具有低功耗、体积小和紧凑尺寸等优点,因此可用于振动监测,特别是在偏远地区。
方法
光纤振动传感器的MAPU原理图
MAPU原理图如图1所示。该系统的核心是意法半导体(ST Microelectronics)的一款开发板(Nucleo F411RE),该开发板也用于ST的ARM 32位微控制器,即STM32F411RET6。该微控制器具备一些特性,例如最高100 MHz的CPU频率、512 KB闪存、128 KB静态随机存取存储器、16通道12位模数转换器以及内置浮点运算单元,能够提供足够的信号处理能力。
经过一阶低通无源滤波器滤波后的模拟输入信号被送入微控制器单元内置模数转换器(ADC)的通道0。该模数转换器将0 ‐ 3.3V范围内的模拟信号转换为12位的数字表示。在1秒窗口内采集2048个数据,然后使用FFT方法进行处理,以提取频域中的信号特征。当采样频率为2048 Hz时,该系统可处理0至1024 Hz的输入信号。低通滤波器设计用于抑制超出此范围的所有输入信号。使用FFT方法进行信号处理的结果随后以字符串形式通过USB串行输出,并由笔记本电脑或台式机上的串口终端软件捕获。使用MAPU进行振动测量的流程图如图2所示。
结果与讨论
用于表征光纤振动传感器的MAPU实验如图3所示。来自信号发生器的正弦信号被输入到微控制器中,通过FFT方法对信号进行处理以计算信号频率。同时,使用数字万用表测量信号幅度。
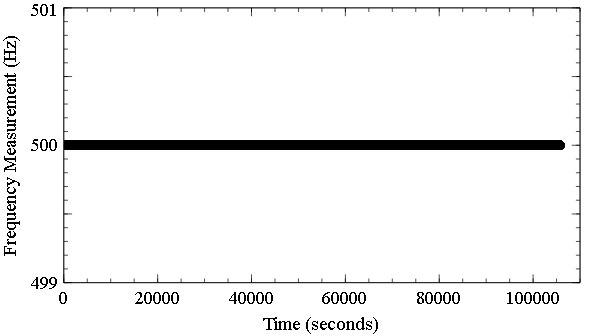
为了评估稳定性,向MAPU输入一个500赫兹的恒定频率信号,同时使用个人计算机监控计算出的频率。经过29小时的测量,MAPU显示出稳定的500赫兹频率输出,如图4所示。通过以20赫兹间隔将输入频率从20赫兹切换到1000赫兹,来检查MAPU的频率响应。该测量在一定程度的输入信号衰减下进行,包括0、−10、−20和−30 dB衰减。
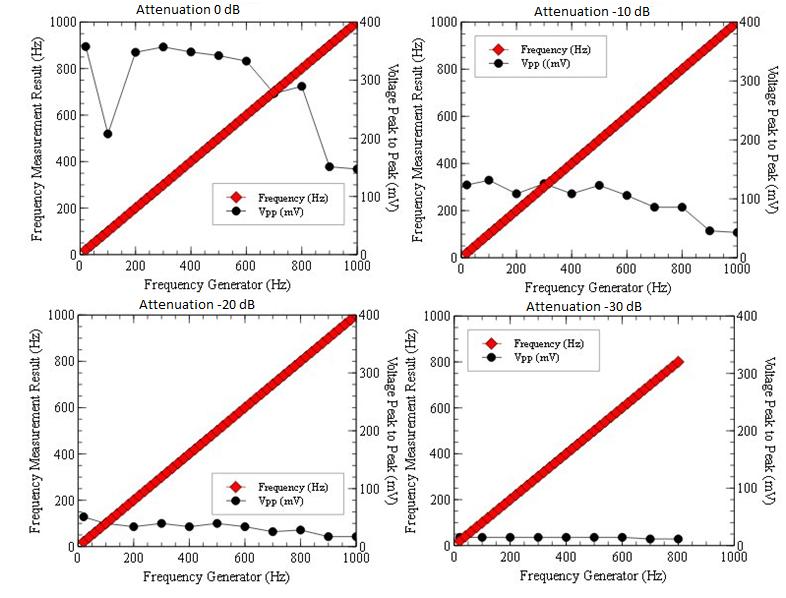
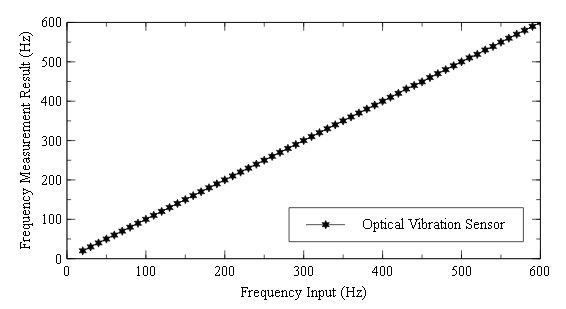
图5显示,MAPU能够检测在20至1000赫兹范围内、输入信号衰减为0、−10和−20分贝的输入信号。当输入信号衰减至−30分贝时,MAPU无法检测高于800赫兹的频率。当输入信号衰减至−30分贝且频率高于800赫兹时,使用数字万用表测得的电压低于4毫伏。这表明MAPU能够在0至1000赫兹的频率范围内检测最小幅度为4毫伏均方根的输入信号。

图6显示了用于光纤振动传感器的MAPU实验装置。该振动传感器基于如图7所示的光纤SMS结构。传感器安装在木质平台上,通过低音扬声器使平台产生振动。低音扬声器由信号发生器输出的正弦信号驱动,并通过音频放大器进行放大。
在本实验中,使用调谐在1560纳米的可调谐激光源将光注入SMS光纤传感器。采用高速光电探测器捕获SMS光纤传感器的输出,并将其转换为电信号。由于SMS光纤结构中的传输光功率受多模干涉影响,光电探测器输出将反映由振动引起的功率波动。光电探测器输出随后由MAPU处理以提取振动频率。图8显示了驱动扬声器的输入信号频率与由MAPU检测到的输出频率之间的线性相关数据。实验结果表明,输入信号频率与由MAPU检测到的频率相近。由于振动源的限制,MAPU无法检测高于600赫兹的振动。
结论
用于光纤振动传感器的基于微控制器的采集与处理单元(MAPU)已成功开发。在稳定性评估过程中,成功验证了MAPU在采集和处理输入信号方面的稳定运行。特性表征表明,MAPU能够检测频率范围为20至1000赫兹、最小幅度为4毫伏均方根的输入信号。实验结果表明,MAPU可检测高达600赫兹的振动频率。检测范围的降低是由于实验中所用振动源的限制所致。MAPU的开发将为光纤振动传感器提供一种紧凑型低功耗解调系统。


















 1657
1657

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









