








在重型设备吊装领域,吊盖虽是一个相对较小的部件,却是整个吊装系统的 “生命线”。它直接连接着设备与吊索具,其设计的可靠性关乎整个吊装任务的成败、设备的安全乃至人员的生命。
一、吊盖的功能与重要性:承上启下的关键枢纽
吊盖,作为吊装系统中的核心受力连接件,核心功能有三:
集中受力:将吊绳的分散拉力集中传递到设备的主体结构上。
安全连接:通过与卸扣等索具的精准匹配,实现安全、可靠的连接。
载荷传递:将巨大的吊装载荷平稳、高效地传递到设备法兰、筒体等部位。
一个设计不当的吊盖,就如同大坝上的蚁穴,可能导致局部结构撕裂、螺栓拉断甚至整体吊装失败的灾难性后果。因此,其设计的科学性、计算的精确性与制造的可靠性,是吊装工程中不可忽视的基石。
二、传统吊盖设计的难点与痛点:工程师的 “费时费力” 循环
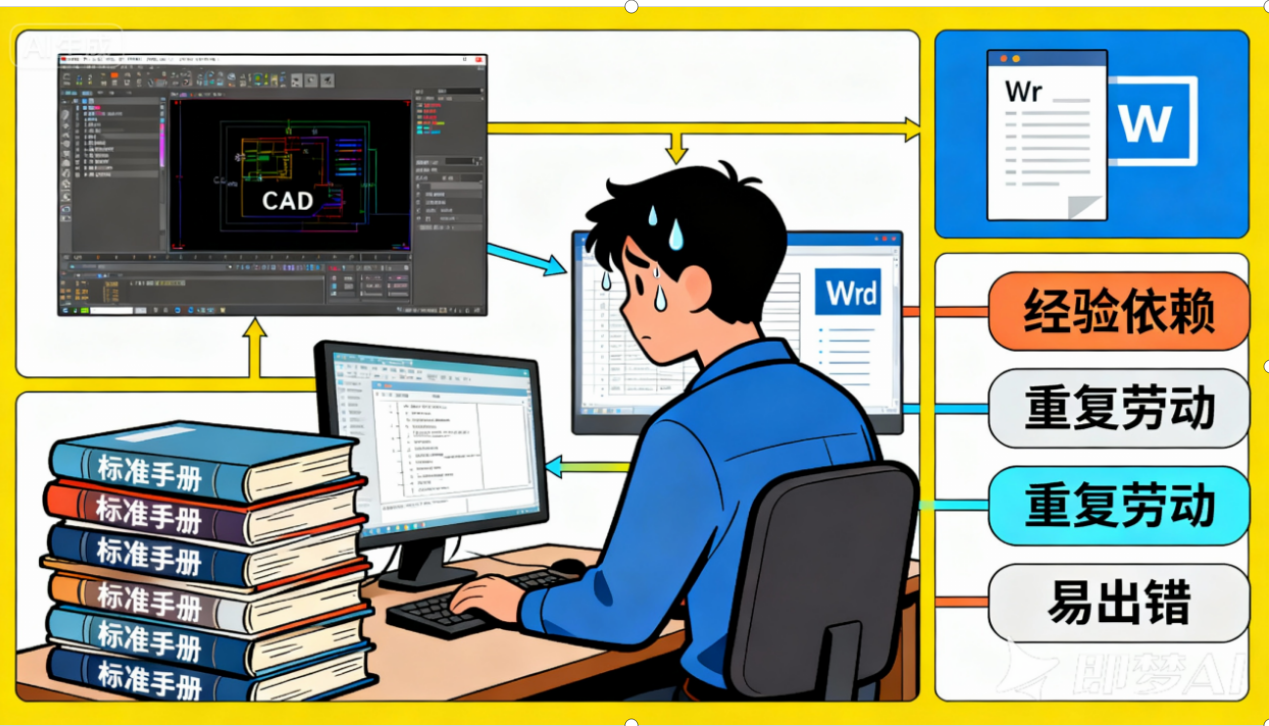
在传统设计模式下,吊盖设计是一项极度依赖工程师个人经验且繁琐重复的工作,痛点集中体现在:
难点一:经验依赖高,标准化难:吊盖外形、卸扣匹配、加强板设置等,严重依赖工程师的经验,难以形成标准化、可复用的设计流程,设计质量参差不齐。
难点二:多工况验算复杂,易疏漏:一个完整的吊盖设计,需对加强环板、连接螺栓、法兰本身进行强度、刚度、稳定性等多工况校核,手动计算工作量大、公式繁琐,极易出错或考虑不周。
痛点三:模型与图纸生成耗时:从计算参数到生成可用于施工的三维模型和二维 CAD 图纸,再到生成有限元分析模型,过程割裂,需要在不同软件间反复切换、重复建模,耗费大量时间。
痛点四:计算书编制繁琐:制作一份包含公式、引用标准、施工图和结果分析的 Word 计算书,是一项枯燥且容易格式混乱的 “体力活”。
三、革命性解决方案:吊装助理 - 吊盖设计模块,化繁为简的智能引擎
针对以上痛点,吊装助理 - 吊盖设计模块集成了先进的算法与工程知识,提供了一套全流程的自动化解决方案。
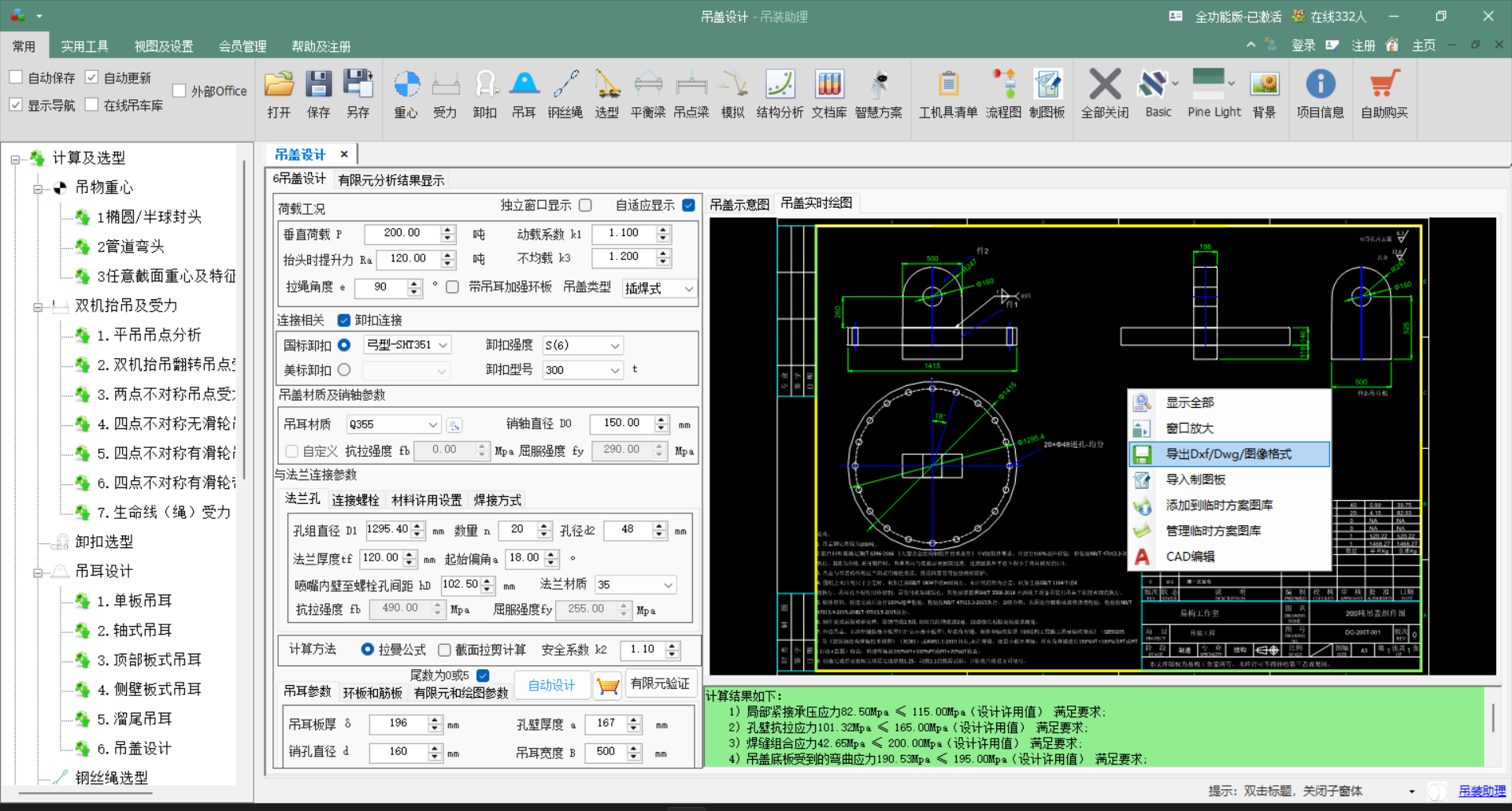
(一)解决方案一:全网首创外形算法,实现 “一键智能设计”
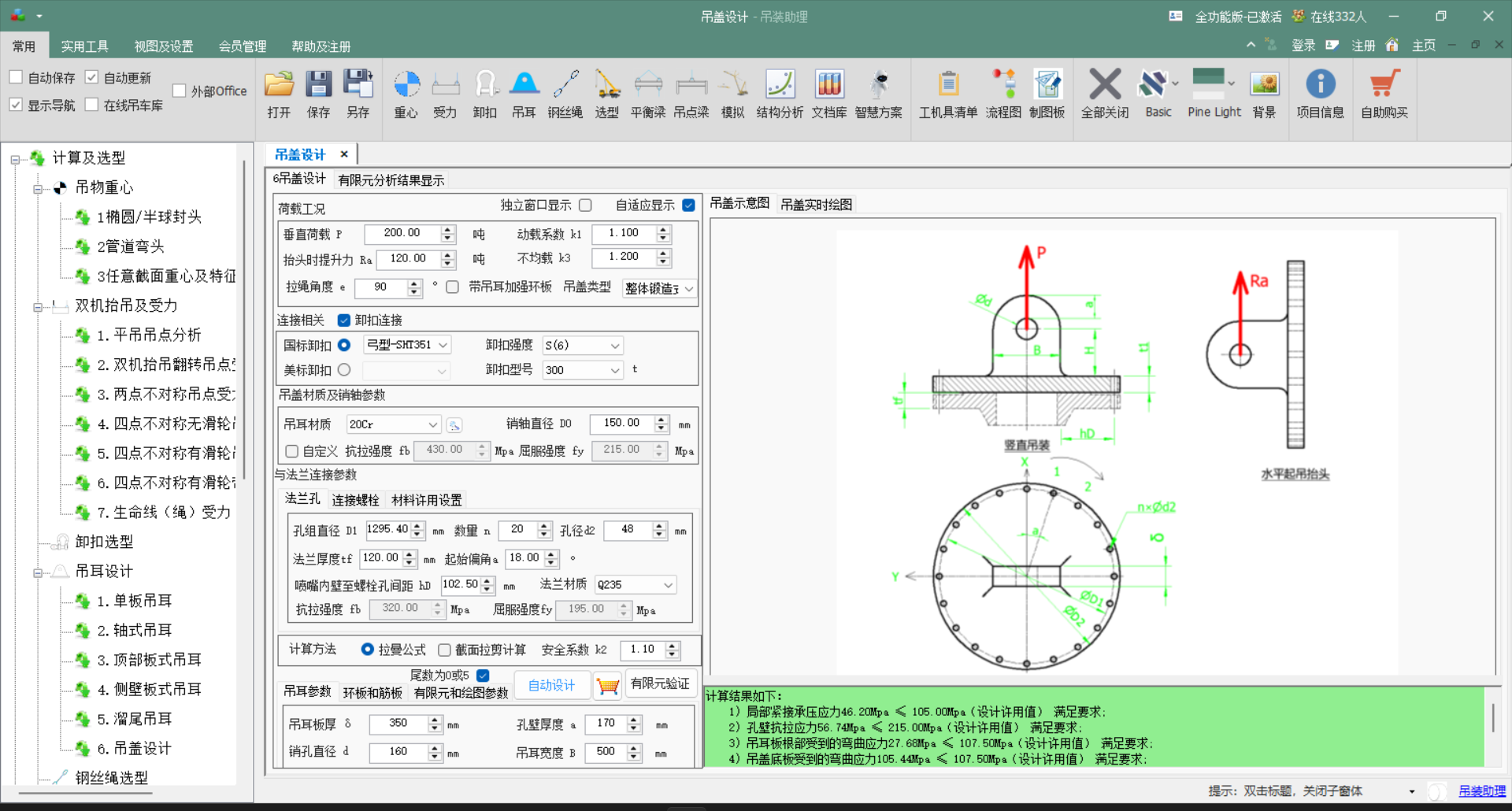
核心干货:模块内置了首创的吊盖外形自动设计算法。用户只需输入基本载荷与卸扣型号,系统即可基于内部强大的知识库和优化算法,自动匹配最佳卸扣,并一键生成最优的吊盖外形与结构尺寸。
(二)解决方案二:全类型覆盖与全工况自动验算
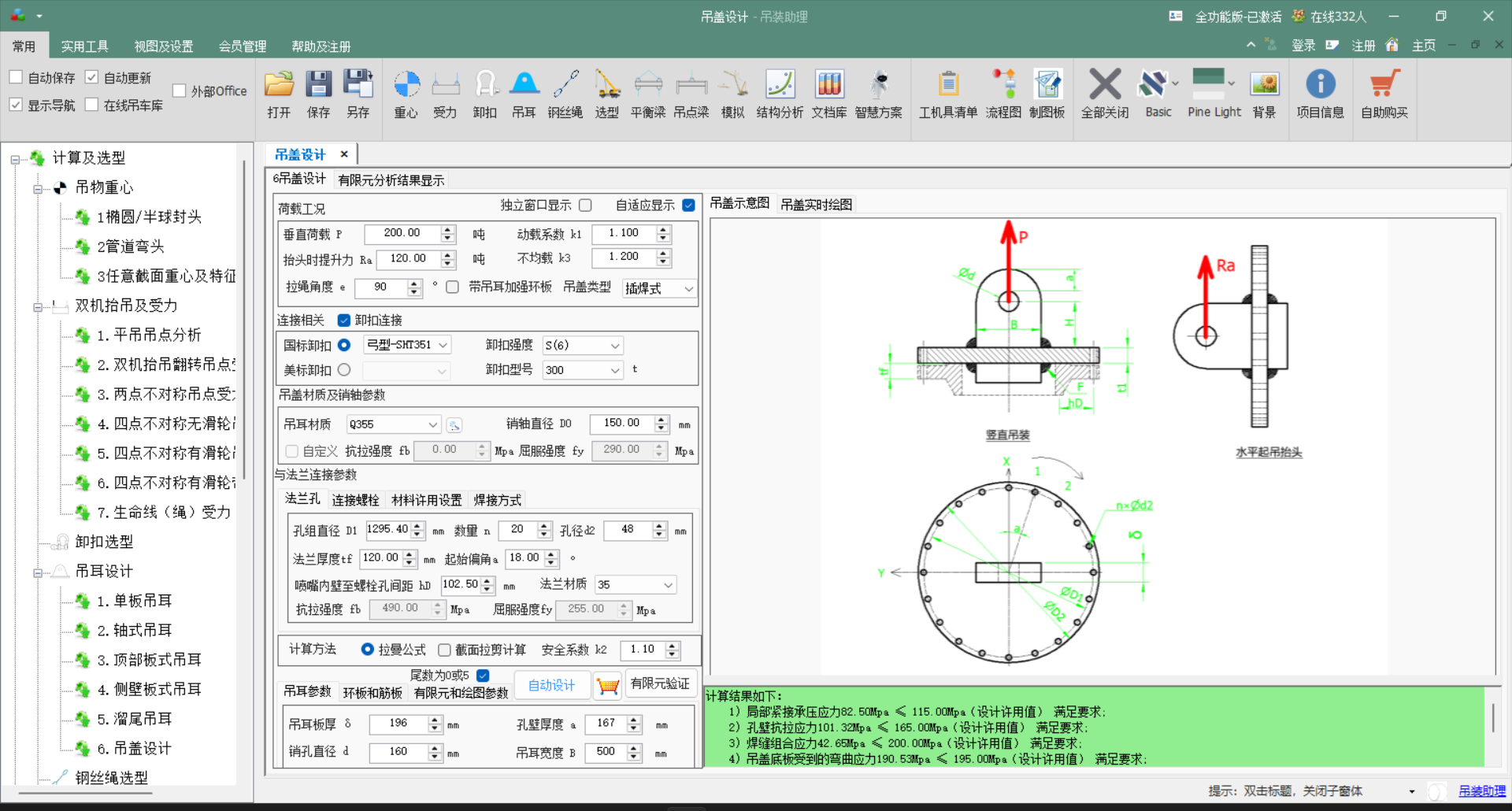
核心干货:无论是整体锻造式还是插焊式吊盖,模块均能覆盖其设计与选型。更重要的是,它能够自动完成对加强环板、连接螺栓、法兰等关键部件的多工况强度与刚度验算,确保设计在理论上的绝对安全。
(三)解决方案三:分析 - 建模 - 出图,全流程一键贯通
这是本模块最具颠覆性的价值所在:
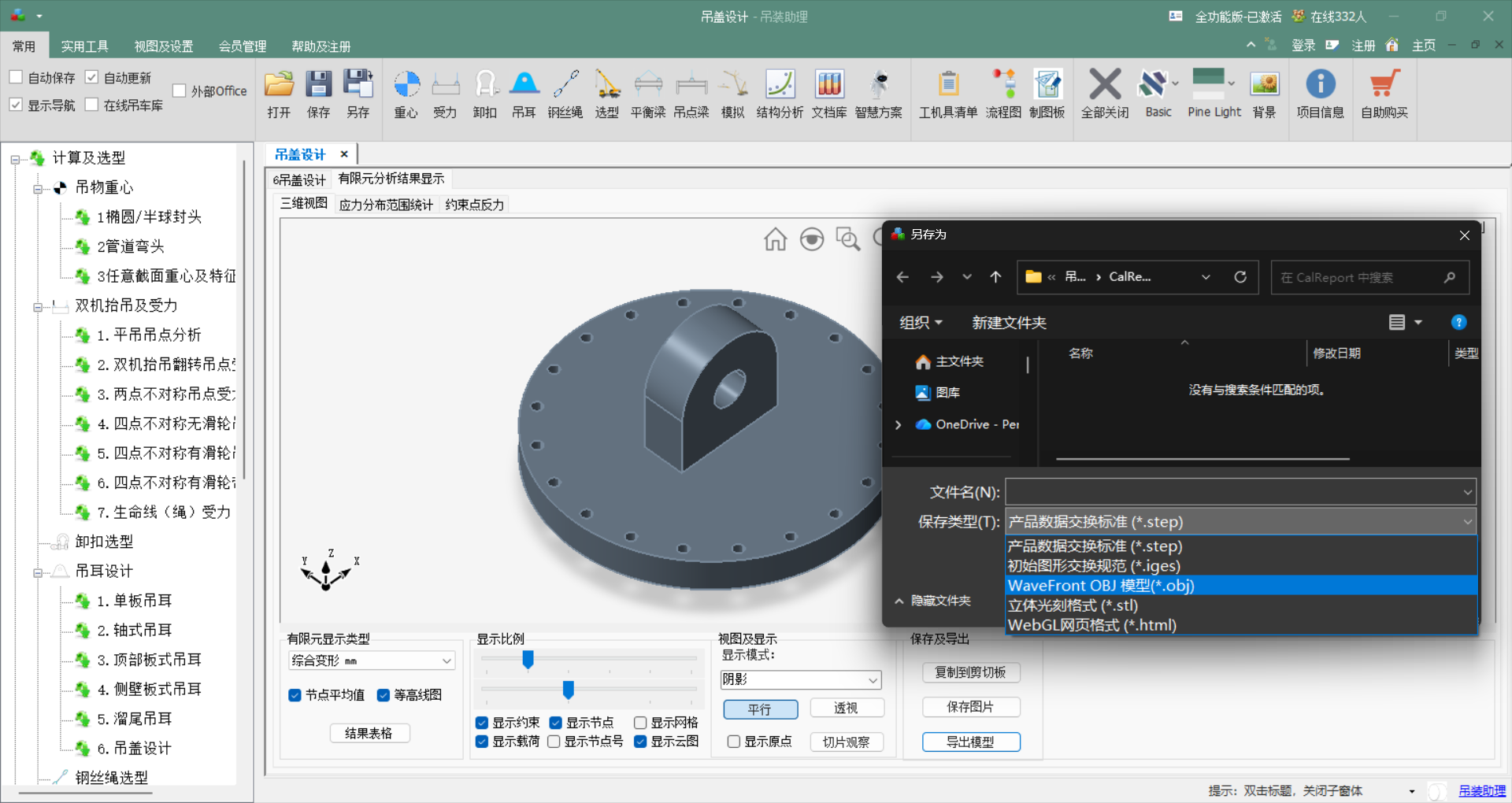
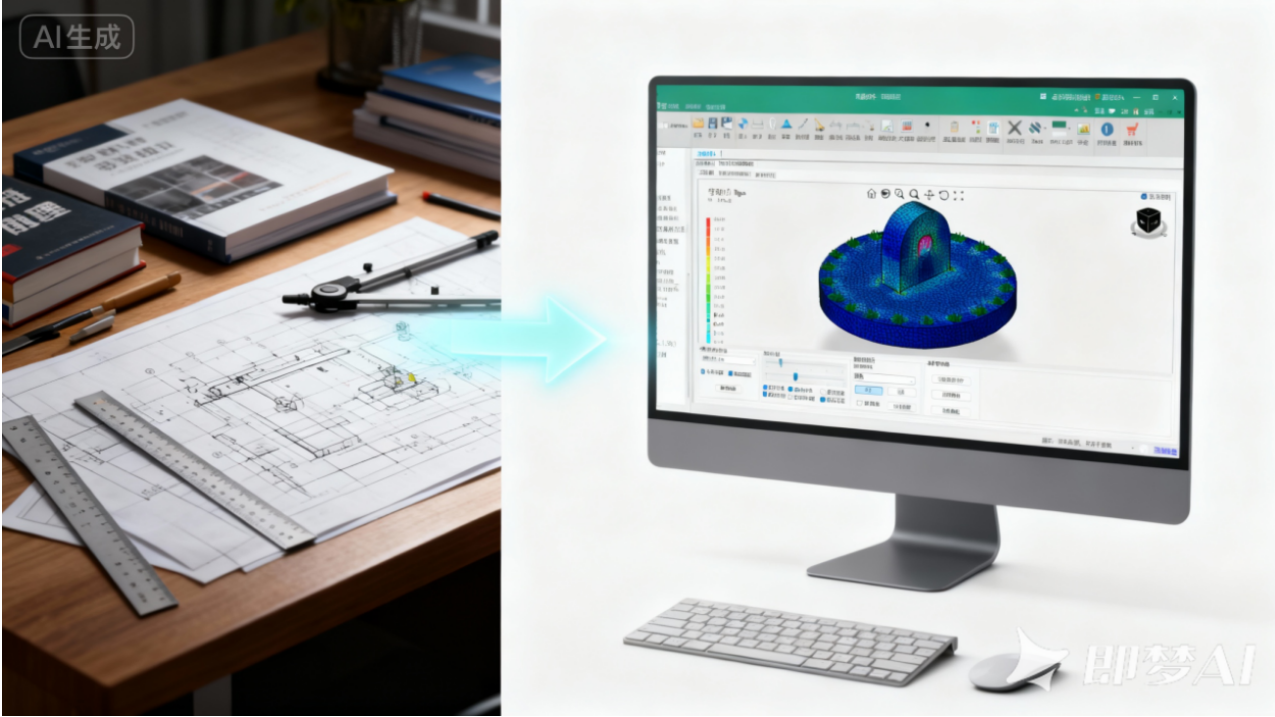
一键有限元分析:直接一键生成参数化的三维有限元分析模型并进行计算,即刻获取详尽的应力云图、变形云图等结果。
插图提示:一张精美的吊盖有限元应力云图,颜色梯度从蓝色(低应力)到红色(高应力)平滑过渡,清晰显示最大应力点,云图专业且视觉冲击力强。
一键生成施工模型:可一键生成用于制造与施工的三维模型,并支持导出STEP, IGES, OBJ, STL等主流格式,无缝对接加工、3D 打印与可视化系统。
一键生成 CAD 图纸:直接导出DXF/DWG格式的可编辑二维工程图,标注清晰,图层规范。
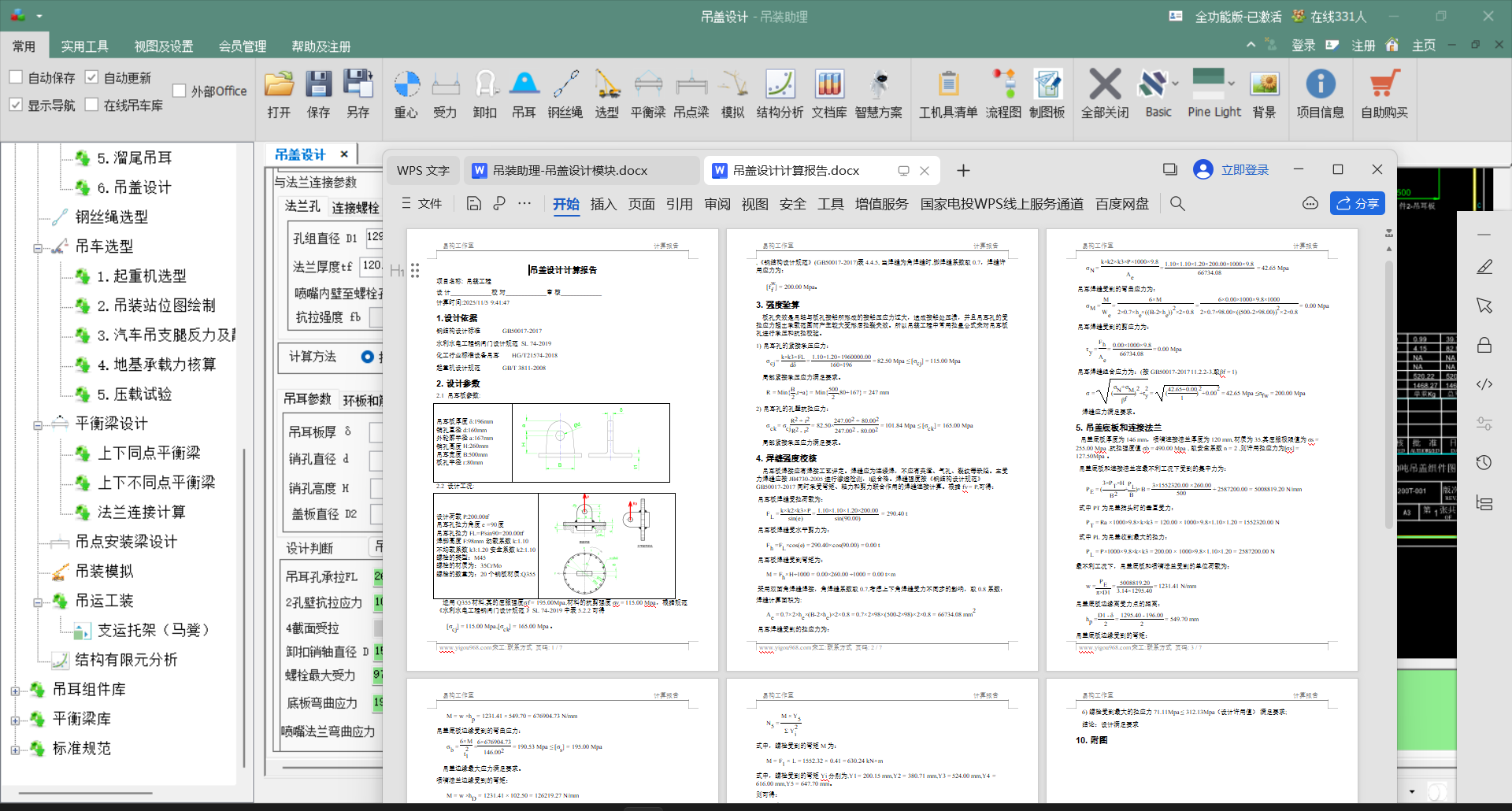
(四)解决方案四:专业计算书,自动秒出
模块能自动生成图文并茂、公式规范、附带施工图的 Word 格式计算书。所有计算过程、引用标准和结论清晰呈现,不仅用于内部存档,更能为客户和审计方提供最专业、最权威的技术交付物。
结语
吊装助理 - 吊盖设计模块,不仅仅是一个设计工具,它更是一位不知疲倦、知识渊博的专业设计合伙人。它将工程师从繁琐的计算、建模和文档工作中彻底解放,让其能更专注于方案的整体规划与创新。
从 “经验驱动” 到 “算法与数据驱动”,这正是工业软件迈向智能化、提升本质安全与效率的典范。选择它,就是选择为您的吊装工程上一份最智能、最可靠的双保险。
立即体验,开启吊盖设计的全自动、高可靠性新时代!


















 666
666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











