




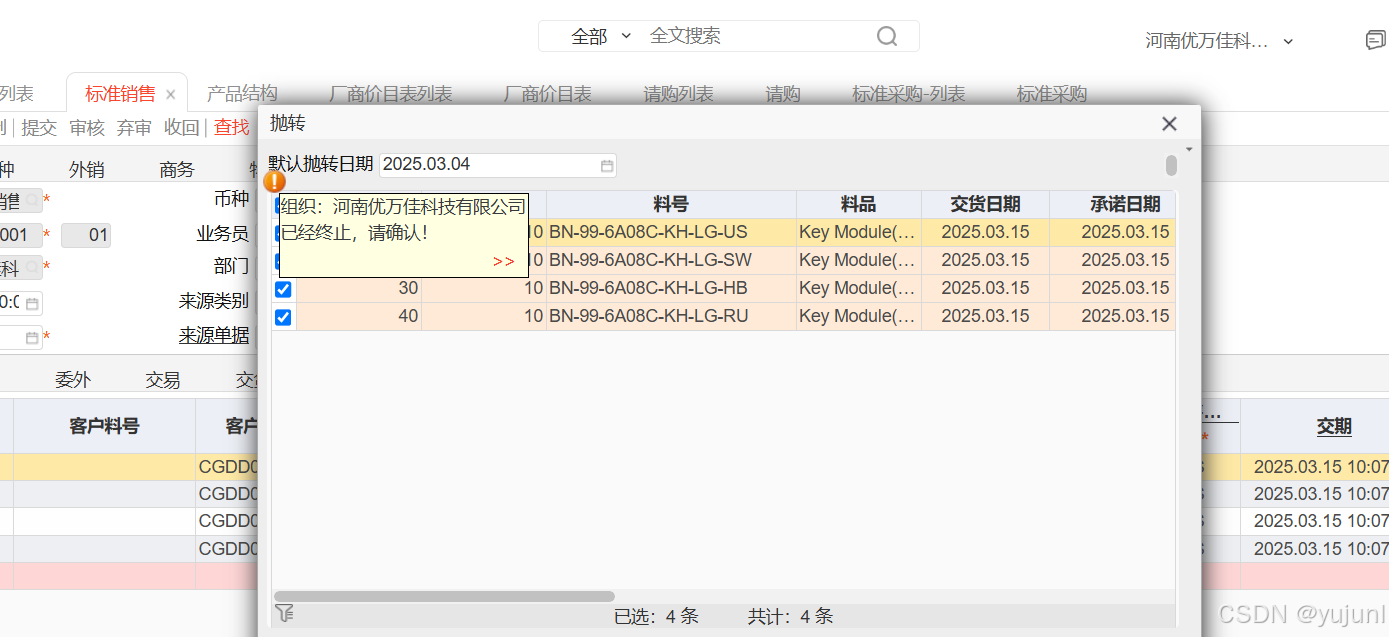
突然出来这样一个提示,还以为是xxxx公司停止运营了呢。用友的工程师不能精准描述一下错误内容文字吗?实际上是说这个公司的价目表被终止了!多组织业务流程中,抛转销售订单时有这样的提示。提示文字南辕北辙,浪费了不少时间。
在贸易路径的配置参数中也有价目表的栏位,多组织业务单据抓的是贸易路径中的价目表ID。如图所示。之前的分析思想中,根深蒂固的惯性,以为关连带上的价目表是供应商档案,或是订单上的信息。在这个方向上的探索是无果而终的。
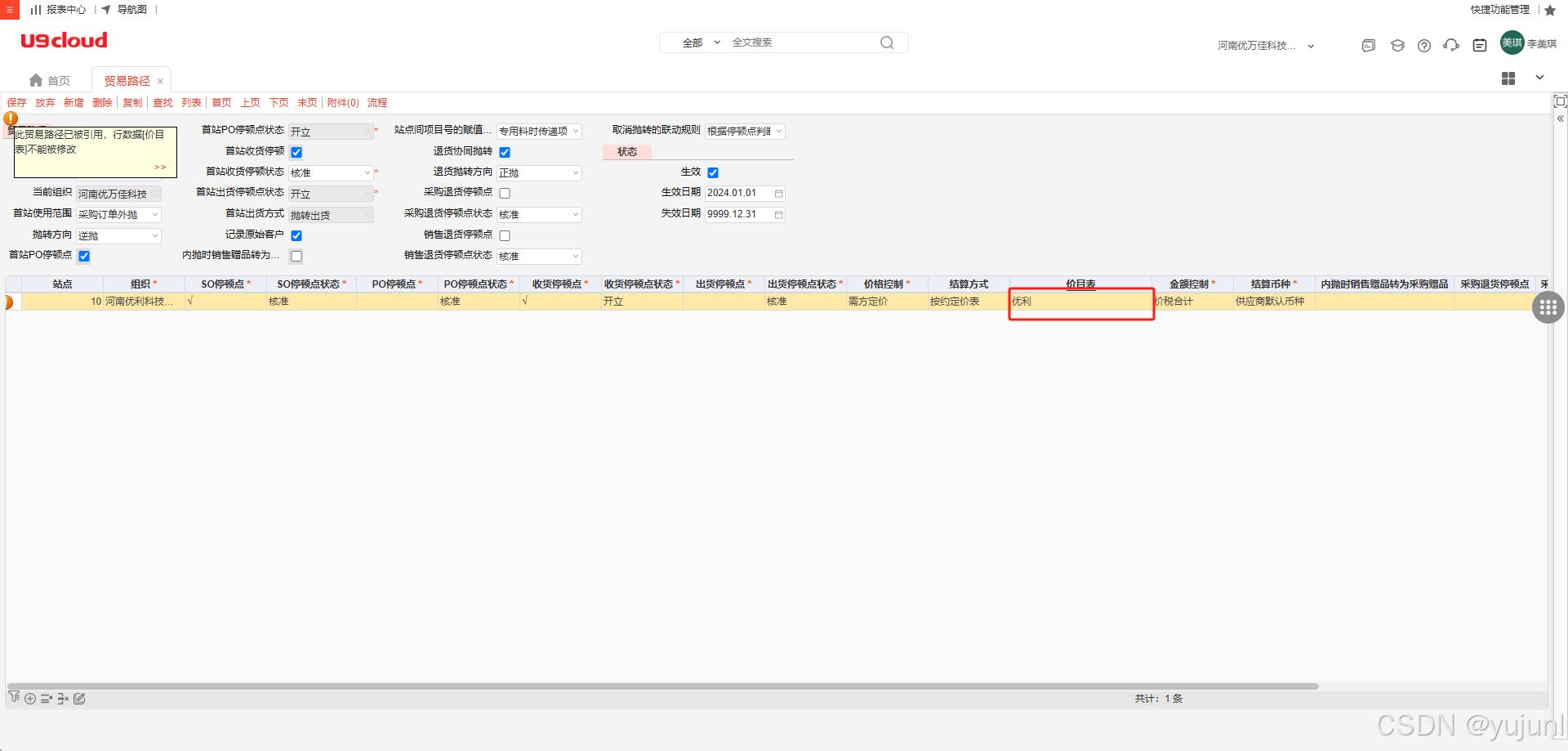
措施:贸易路径参数配置也是一行记录。有了引用数据后是不能修改的。只好动用风险大的方案,后台修改一下吧,不得已而为之。

















 6754
6754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









