




曲面细分(Tessellation)
GPU 只能绘制三角形,因此要把一个椭球体渲染成“地球”,必须先计算出一组能近似椭球表面的三角形——这一过程称为曲面细分。本节介绍三种最常用的椭球细分算法,并比较它们的优劣。
5.1 细分曲面(Subdivision Surfaces)
核心思想
先在原点构造单位球的网格,再用椭球半径 (a,b,c)(a,b,c)(a,b,c) 缩放即可得到椭球。这样既简洁又无需三角函数。
步骤
-
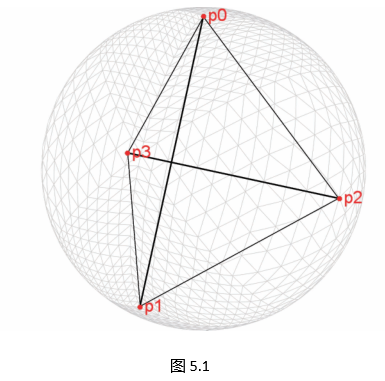
从正四面体开始(图 5.1)。
顶点坐标:
p0=(0,0,1),p1=(0,223,−13),p2=(−63,−23,−13),p3=(63,−23,−13). \begin{aligned} \mathbf p_0 &= (0,0,1),\\[2pt] \mathbf p_1 &= \bigl(0,\tfrac{2\sqrt2}{3},-\tfrac13\bigr),\\[2pt] \mathbf p_2 &= \bigl(-\tfrac{\sqrt6}{3},-\tfrac{\sqrt2}{3},-\tfrac13\bigr),\\[2pt] \mathbf p_3 &= \bigl(\tfrac{\sqrt6}{3},-\tfrac{\sqrt2}{3},-\tfrac13\bigr). \end{aligned} p0p1p2p3=(0,0,1),=(0,322,−31),=(−36,−32,−31),=(36,−32,−31). -
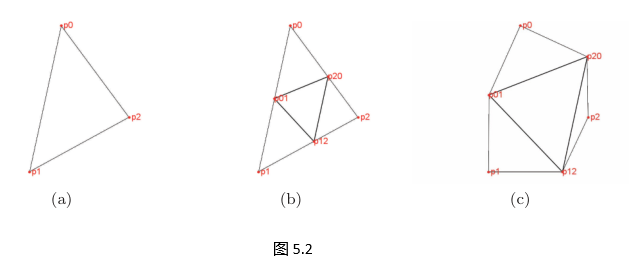
对每个三角形四等分:
- 取三边中点 pij=(pi+pj)/2\mathbf p_{ij}=(\mathbf p_i+\mathbf p_j)/2pij=(pi+pj)/2;
- 归一化到单位球面:pij←pij/∥pij∥\mathbf p_{ij}\leftarrow \mathbf p_{ij}/\|\mathbf p_{ij}\|pij←pij/∥pij∥。
结果得到 4 个新的几乎等边三角形(图 5.2)。
-
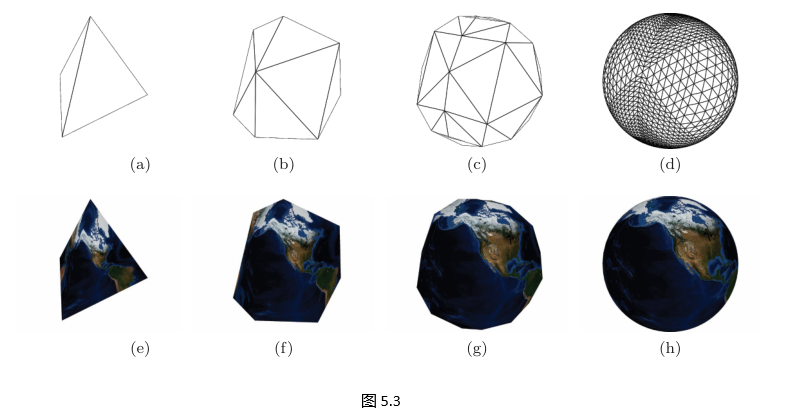
递归执行,直到满足停止条件(递归深度 nnn)。
- nnn 次细分后三角面数为 4 n+14^{\,n+1}4n+1。
- 深度越大,网格越密(图 5.3),但计算与显存开销也随之增加。
LOD(细节层次)
- 视角靠近时可用大 nnn;
- 视角远离时减小 nnn 以节省资源。
替代拓扑
正四面体只有 4 个面;使用更多面的正多面体(八面体、二十面体)可减少所需细分次数,但实现复杂度略增。
5.2 细分曲面实现(Subdivision-Surfaces Implementation)
- 先创建包含 4 个初始顶点的
Mesh。 - 递归函数
Subdivide负责:- 若
level == 0:直接记录当前三角形索引; - 否则:计算三条边中点→归一化→递归细分 4 次。
- 若
- 顶点顺序始终为逆时针,确保正面剔除方向一致。
实现代码
Mesh* SubdivisionSphereTessellatorSimple::compute(int numberOfSubdivisions) {
if (numberOfSubdivisions < 0) {
throw std::out_of_range("numberOfSubdivisions");
}
Mesh* mesh = new Mesh();
mesh->setPrimitiveType(PrimitiveType::Triangles);
mesh->setFrontFaceWindingOrder(WindingOrder::Counterclockwise);
size_t vertexCount = SubdivisionUtility::numberOfVertices(numberOfSubdivisions);
VertexAttributeDoubleVector3* positionsAttribute = new VertexAttributeDoubleVector3("position", vertexCount);
mesh->attributes()->add(positionsAttribute);
size_t indexCount = 3 * SubdivisionUtility::numberOfTriangles(numberOfSubdivisions);
IndicesUnsignedInt* indices = new IndicesUnsignedInt(indexCount);
mesh->setIndices(indices);
double negativeRootTwoOverThree = -std::sqrt(2.0) / 3.0;
const double negativeOneThird = -1.0 / 3.0;
double rootSixOverThree = std::sqrt(6.0) / 3.0;
std::vector<glm::dvec3>& positions = positionsAttribute->values();
positions.push_back(glm::dvec3(0.0, 0.0, 1.0));
positions.push_back(glm::dvec3(0.0, (2.0 * std::sqrt(2.0)) / 3.0, negativeOneThird));
positions.push_back(glm::dvec3(-rootSixOverThree, negativeRootTwoOverThree, negativeOneThird));
positions.push_back(glm::dvec3(rootSixOverThree, negativeRootTwoOverThree, negativeOneThird));
subdivide(positions, *indices, TriangleIndicesUnsignedInt(0, 1, 2), numberOfSubdivisions);
subdivide(positions, *indices, TriangleIndicesUnsignedInt(0, 2, 3), numberOfSubdivisions);
subdivide(positions, *indices, TriangleIndicesUnsignedInt(0, 3, 1), numberOfSubdivisions);
subdivide(positions, *indices, TriangleIndicesUnsignedInt(1, 3, 2), numberOfSubdivisions);
return mesh;
}
void SubdivisionSphereTessellatorSimple::subdivide(std::vector<glm::dvec3>& positions,
IndicesUnsignedInt& indices,
const TriangleIndicesUnsignedInt& triangle,
int level) {
if (level > 0) {
glm::dvec3 mid01 = (positions[triangle.I0()] + positions[triangle.I1()]) * 0.5;
mid01 = glm::normalize(mid01);
positions.push_back(mid01);
glm::dvec3 mid12 = (positions[triangle.I1()] + positions[triangle.I2()]) * 0.5;
mid12 = glm::normalize(mid12);
positions.push_back(mid12);
glm::dvec3 mid20 = (positions[triangle.I2()] + positions[triangle.I0()]) * 0.5;
mid20 = glm::normalize(mid20);
positions.push_back(mid20);
int i01 = static_cast<int>(positions.size()) - 3;
int i12 = static_cast<int>(positions.size()) - 2;
int i20 = static_cast<int>(positions.size()) - 1;
--level;
subdivide(positions, indices, TriangleIndicesUnsignedInt(triangle.I0(), i01, i20), level);
subdivide(positions, indices, TriangleIndicesUnsignedInt(i01, triangle.I1(), i12), level);
subdivide(positions, indices, TriangleIndicesUnsignedInt(i01, i12, i20), level);
subdivide(positions, indices, TriangleIndicesUnsignedInt(i20, i12, triangle.I2()), level);
} else {
indices.addTriangle(triangle);
}
}
5.3 立方体贴图细分(Cube-Map Tessellation)
思路
把一个轴对齐并绕 z 轴旋转 45° 的单位立方体先均匀细分,再把每个顶点透视投影到椭球面(先归一化,再乘半径 (a,b,c)(a,b,c)(a,b,c))。
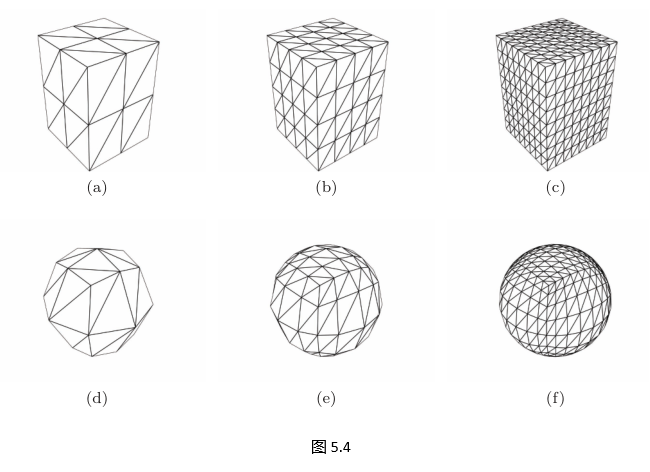
- 立方体 6 个面,每个面先划分成规则网格(2×2、4×4、8×8…)(图 5.4(a–c))。
- 网格越密,椭球近似越精细(图 5.4(d–f))。
- 直线在立方体面上→椭球面上变为“类测地”曲线,非经纬线,但极点无过度细分。
实现
CubeMapEllipsoidTessellator::compute 接收椭球参数、网格分区数、顶点属性需求,返回网格。
步骤:
- 生成 8 个角点;
- 在 12 条边上插入中间点;
- 逐行细分每个面;
- 最后将点投影到椭球并计算法线/纹理坐标。
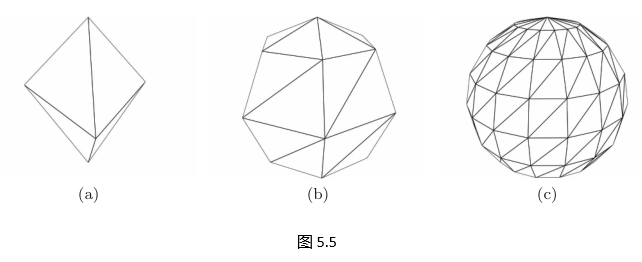
5.4 经纬网格细分(Geographic-Grid Tessellation)
两步法
-
生成点
嵌套循环:- 纬度 φ∈[0,π]\varphi \in [0,\pi]φ∈[0,π],经度 θ∈[0,2π]\theta \in [0,2\pi]θ∈[0,2π]
- 步长可分别设置
用球坐标转笛卡尔:
x=acosθsinφ,y=bsinθsinφ,z=ccosφ. \begin{aligned} x &= a \cos\theta \sin\varphi,\\ y &= b \sin\theta \sin\varphi,\\ z &= c \cos\varphi. \end{aligned} xyz=acosθsinφ,=bsinθsinφ,=ccosφ.
极点特殊处理:φ=0,π\varphi = 0,\piφ=0,π 时各用一个顶点 (0,0,±c)(0,0,\pm c)(0,0,±c)。
-
生成索引
- 极区用三角形扇(triangle fan);
- 其余行用三角形条带(triangle strip)。
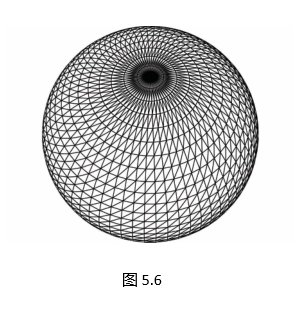
图 5.5 展示不同密度的网格;图 5.6 显示极点处三角形过密。
优缺点
- 实现直观;
- 避免跨越国际日期变更线(IDL);
缺点:
- 极点三角形极细,导致光照/纹理伪影、片段冗余、裁剪效率低。
可通过按纬度调节密度(如按 sinφ\sin\varphisinφ 缩放)缓解。
5.5 三种算法对比
| 特性 | 细分曲面 | 立方体贴图 | 经纬网格 |
|---|---|---|---|
| 极点过采样 | 无 | 无 | 有(可调) |
| 跨 IDL 三角形 | 有(可处理) | 有(可处理) | 无 |
| 实现复杂度 | 低 | 中 | 低 |
| 三角形形状 | 接近等边 | 面中央好,角部略畸变 | 纬度低处好,近极细长 |
| 典型应用 | Spore 星球 | NASA World Wind(实验版) | 早期 World Wind、STK、Insight3D |
没有绝对的“最佳”方案;根据需求(极点质量、实现难度、LOD 灵活性)选择即可。
参考:
- Cozi, Patrick; Ring, Kevin. 3D Engine Design for Virtual Globes. CRC Press, 2011.

















 913
913

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









