




 了解spring-boot-devtools模块如何实现代码更改后的自动应用重启,通过配置pom.xml和IDEA设置,实现开发过程中的快速迭代。
了解spring-boot-devtools模块如何实现代码更改后的自动应用重启,通过配置pom.xml和IDEA设置,实现开发过程中的快速迭代。
spring-boot-devtools 是一个为开发者服务的一个模块,其中最重要的功能就是自动应用代码更改到最新的App上面去。原理是在发现代码有更改之后,重新启动应用,但是速度比手动停止后再启动还要更快,更快指的不是节省出来的手工操作的时间。
pom.xml:
<parent>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-starter-parent</artifactId>
<version>2.0.5.RELEASE</version>
</parent>
<dependency>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-devtools</artifactId>
<optional>true</optional>
<scope>true</scope>
</dependency>
<plugin>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-maven-plugin</artifactId>
<configuration>
<!--fork : 如果没有该项配置,devtools不会起作用,即应用不会restart -->
<fork>true</fork>
</configuration>
</plugin>
当我们修改了java类后,IDEA默认是不自动编译的,而spring-boot-devtools又是监测classpath下的文件发生变化才会重启应用,所以需要设置IDEA的自动编译:
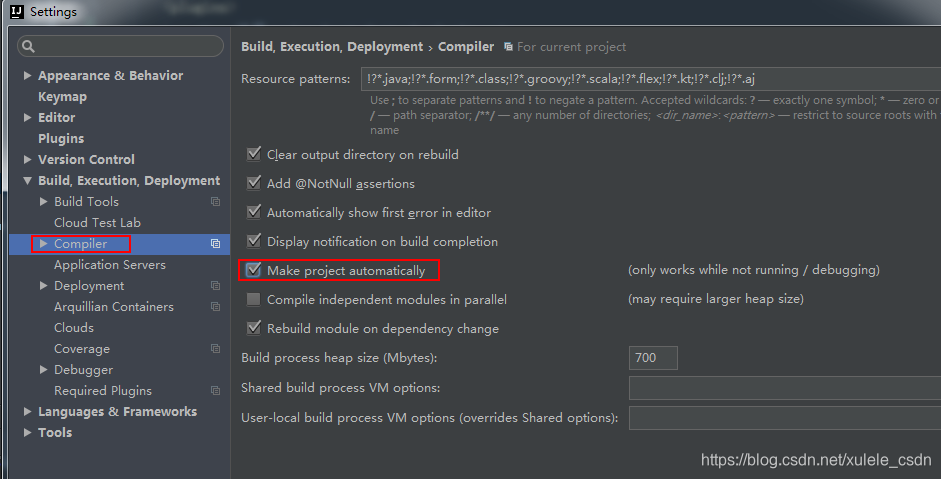
1.File — setting — Compile — Make project automatically — 打钩
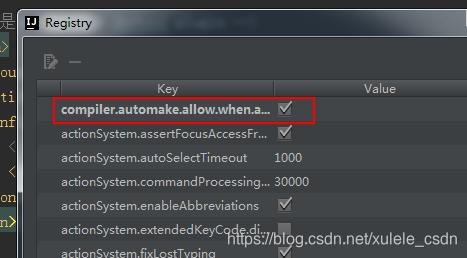
2.ctrl+alt+shift+/ — 选择Registry — compiler.automake.allow.when.app.running — 打钩
配置完成即可完成热部属。

















 8743
8743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









