




你好呀!
我是小易同学,一名普通的不能再普通的学习者。
写文章是为了记录自己的学习过程,同时也希望能帮助到需要的人。
如果我的文章对您有帮助,请不要忘记关注我哦🥰
一、目标
RPA的底层其实是Python语言,所以这次要解决的问题是如何用Python去获取配置文件中的参数。
二、介绍
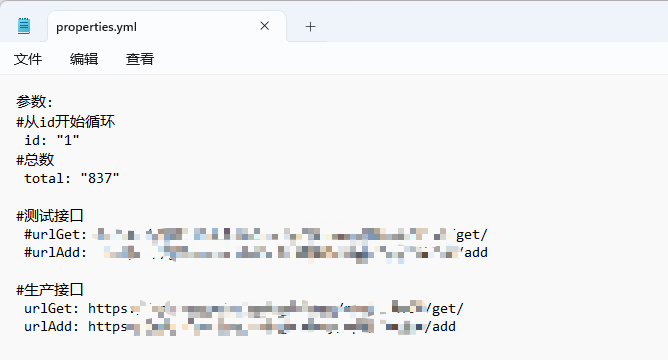
1.此次操作的配置文件是yal文件
![]()
2.RPA编辑器有两种方式,一种是编码,另一种是可视化组件
(本质都是用代码编写的方式,只是可视化组件的方式中组件是被开发者写好了的,可以直接根据功能用)
三、结合编码和可视化来获取
1.yal配置文件
编写时的基本注意点:
a.k: v:表示一对键值对(空格必须有)。
b.以空格的缩进来控制层级关系;只要是左对齐的一列数据,都是同一个层级的。
c.字符串默认不用加上单引号或者双引号;
d. 在下一行来写对象的属性和值的关系时,注意缩进。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 394
394

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











