




一、硬件
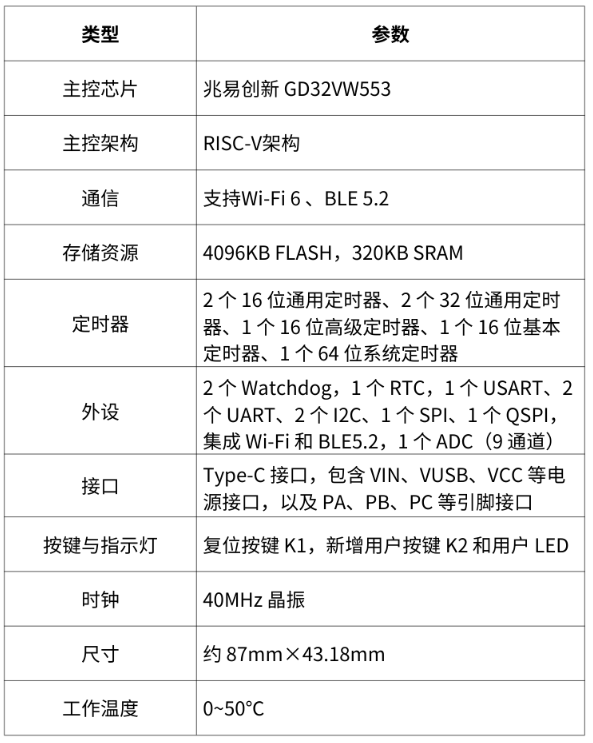
在快速发展的物联网与智能设备时代,RISC-V作为一种先进的开源指令集架构,正逐步成 为业界的焦点。 中电港萤火工场推出基于兆易创新(GigaDevice)GD32VW553——一款RISC-V内核的32 位MCU的开源硬件板GD32VW553-IOT-V2。该板集成了主控芯片卓越的无线连接能力(集成Wi-Fi 6 与BLE5.2)、强大的性能与能效比以及丰富的外设接口,可享受到开源社区带来的丰富资源 和便利,极大地方便了开发者的快速部署和应用创新。
全新的设计针对旧款的开发痛点进行了系统性优化:
Type-C口升级:集成串口功能,简化调试与程序下载流程,提升开发便捷性
新增开关:增设用户可自定义按键及指示灯,拓展交互控制与状态显示功能
板面布局优化:背面增加引脚丝印,正面仅保留关键器件丝印,布局清晰及信息聚焦
FLASH焊接位:移至背面,减少焊接风险,增加开源二次开发的灵活性
BOOT开关优化:升级为拔码式设计,简化操作逻辑,提升切换效率
稳固性增强:板厚增至1mm,提升了整体结构强度与抗变形能力 联合兆易创新打造GD32无线生态专区,整合产品动态、开源分享、方案应用、资料下载 等,https://s.iceasy.com/y1CX4N
二、MLX90614温度传感器
MLX90614 是一款集成红外热电堆传感器和信号处理芯片的非接触式温度计。它采用了先进的红外感应技术,可以对目标物体进行高精度和高分辨率的温度测量,适用于各种工业、汽车和医疗应用。
特性和优点
MLX90614 具有以下主要特性和优点:
- 高精度和高分辨率:由于集成了低噪声放大器、17 位模数转换器和强大的数字信号处理单元,使得温度计具备高精度和高分辨率1。
- 宽温度范围:环境温度范围为 -40℃ 至 125℃,物体温度范围为 -70℃ 至 382.2℃1。
- 低功耗:功耗仅为 1mA 左右,适合于电池供电的场合2。
- 多种输出模式:支持数字 PWM 和 SMBus 输出模式,方便与各种系统集成1。
- 快速响应:响应时间通常在 100ms 以内,可以快速测量温度变化2。
- 非接触式测量:无需接触被测物体,避免了传统温度测量方式中可能引起的污染和磨损问题
工作原理
MLX90614 由红外热电堆传感器 MLX81101 和信号处理芯片 MLX90302 组成。红外热电堆传感器输出的温度信号经过内部低噪声放大器放大后,经过 A/D 转换器转换为 17 位数字信号,通过数字信号处理单元处理后输出
通讯协议:
SMBus (System Management Bus)是 1995 年由 intel 公司提出的一种高效同步串行总线,SMBus 只有两根信号线:双向数据线和时钟信号线,容许 CPU 与各种外围接口器件以串行方式进行通信、交换信息,即可以提高传输速度也可以减小器件的资源占用,另外即使在没有SMBus 接口的单片机上也可利用软件进行模拟。
三、代码
mlx90614.c
/**********************************************************************************
*IIC
* SDA ----> PA6
* SCL ----> PA5
**********************************************************************************/
#include "mlx90614.h"
#define I2C_SDA_RCC RCU_GPIOA
#define I2C_SDA_PORT GPIOA
#define I2C_SDA_PIN GPIO_PIN_6
#define I2C_SCL_RCC RCU_GPIOA
#define I2C_SCL_PORT GPIOA
#define I2C_SCL_PIN GPIO_PIN_5
void I2C_SCL_1(void)
{
gpio_bit_set(I2C_SCL_PORT, I2C_SCL_PIN);
i2c_delay();
}
void I2C_SCL_0(void)
{
gpio_bit_reset(I2C_SCL_PORT, I2C_SCL_PIN);
i2c_delay();
}
void I2C_SDA_1(void)
{
gpio_bit_set(I2C_SDA_PORT, I2C_SDA_PIN);
i2c_delay();
}
void I2C_SDA_0(void)
{
gpio_bit_reset(I2C_SDA_PORT, I2C_SDA_PIN);
i2c_delay();
}
FlagStatus I2C_READ_SDA(void)
{
return gpio_input_bit_get(I2C_SDA_PORT, I2C_SDA_PIN);
}
uint8_t crc_table[] = {
0x00, 0x07, 0x0e, 0x09, 0x1c, 0x1b, 0x12, 0x15, 0x38, 0x3f, 0x36, 0x31,
0x24, 0x23, 0x2a, 0x2d, 0x70, 0x77, 0x7e, 0x79, 0x6c, 0x6b, 0x62, 0x65,
0x48, 0x4f, 0x46, 0x41, 0x54, 0x53, 0x5a, 0x5d, 0xe0, 0xe7, 0xee, 0xe9,
0xfc, 0xfb, 0xf2, 0xf5, 0xd8, 0xdf, 0xd6, 0xd1, 0xc4, 0xc3, 0xca, 0xcd,
0x90, 0x97, 0x9e, 0x99, 0x8c, 0x8b, 0x82, 0x85, 0xa8, 0xaf, 0xa6, 0xa1,
0xb4, 0xb3, 0xba, 0xbd, 0xc7, 0xc0, 0xc9, 0xce, 0xdb, 0xdc, 0xd5, 0xd2,
0xff, 0xf8, 0xf1, 0xf6, 0xe3, 0xe4, 0xed, 0xea, 0xb7, 0xb0, 0xb9, 0xbe,
0xab, 0xac, 0xa5, 0xa2, 0x8f, 0x88, 0x81, 0x86, 0x93, 0x94, 0x9d, 0x9a,
0x27, 0x20, 0x29, 0x2e, 0x3b, 0x3c, 0x35, 0x32, 0x1f, 0x18, 0x11, 0x16,
0x03, 0x04, 0x0d, 0x0a, 0x57, 0x50, 0x59, 0x5e, 0x4b, 0x4c, 0x45, 0x42,
0x6f, 0x68, 0x61, 0x66, 0x73, 0x74, 0x7d, 0x7a, 0x89, 0x8e, 0x87, 0x80,
0x95, 0x92, 0x9b, 0x9c, 0xb1, 0xb6, 0xbf, 0xb8, 0xad, 0xaa, 0xa3, 0xa4,
0xf9, 0xfe, 0xf7, 0xf0, 0xe5, 0xe2, 0xeb, 0xec, 0xc1, 0xc6, 0xcf, 0xc8,
0xdd, 0xda, 0xd3, 0xd4, 0x69, 0x6e, 0x67, 0x60, 0x75, 0x72, 0x7b, 0x7c,
0x51, 0x56, 0x5f, 0x58, 0x4d, 0x4a, 0x43, 0x44, 0x19, 0x1e, 0x17, 0x10,
0x05, 0x02, 0x0b, 0x0c, 0x21, 0x26, 0x2f, 0x28, 0x3d, 0x3a, 0x33, 0x34,
0x4e, 0x49, 0x40, 0x47, 0x52, 0x55, 0x5c, 0x5b, 0x76, 0x71, 0x78, 0x7f,
0x6a, 0x6d, 0x64, 0x63, 0x3e, 0x39, 0x30, 0x37, 0x22, 0x25, 0x2c, 0x2b,
0x06, 0x01, 0x08, 0x0f, 0x1a, 0x1d, 0x14, 0x13, 0xae, 0xa9, 0xa0, 0xa7,
0xb2, 0xb5, 0xbc, 0xbb, 0x96, 0x91, 0x98, 0x9f, 0x8a, 0x8d, 0x84, 0x83,
0xde, 0xd9, 0xd0, 0xd7, 0xc2, 0xc5, 0xcc, 0xcb, 0xe6, 0xe1, 0xe8, 0xef,
0xfa, 0xfd, 0xf4, 0xf3
};
uint8_t CRC8_Calc (uint8_t *p, uint8_t len)
{
uint16_t i;
uint16_t crc = 0x0;
while (len--) {
i = (crc ^ *p++) & 0xFF;
crc = (crc_table[i] ^ (crc << 8)) & 0xFF;
}
return (crc & 0xFF);
}
void i2c_delay(void)
{
uint8_t i = 0;
for(i = 0; i<50;i++);
}
void i2c_start(void)
{
I2C_SDA_1();
i2c_delay();
I2C_SCL_1();
i2c_delay();
I2C_SDA_0();
i2c_delay();
I2C_SCL_0();
}
void i2c_stop(void)
{
I2C_SCL_0();
i2c_delay();
I2C_SDA_0();
i2c_delay();
I2C_SCL_1();
i2c_delay();
I2C_SDA_1();
}
void i2c_init(void)
{
rcu_periph_clock_enable(RCU_GPIOA);
gpio_mode_set(GPIOA, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE,GPIO_PIN_5|GPIO_PIN_6);
gpio_output_options_set(GPIOA, GPIO_OTYPE_OD, GPIO_OSPEED_MAX,GPIO_PIN_5|GPIO_PIN_6);
i2c_stop();
}
uint8_t i2c_wati_ack(void)
{
uint8_t re;
uint8_t time_out = 20;
I2C_SDA_1();
i2c_delay();
I2C_SCL_1();
i2c_delay();
while(time_out--)
{
if(I2C_READ_SDA())
{
re = 1;
}
else
{
re = 0;
}
}
I2C_SCL_0();
i2c_delay();
return re;
}
void i2c_ack(void)
{
I2C_SDA_0();
i2c_delay();
I2C_SCL_1();
i2c_delay();
I2C_SCL_0();
i2c_delay();
I2C_SDA_1();
}
void i2c_nack(void)
{
I2C_SDA_1();
i2c_delay();
I2C_SCL_1();
i2c_delay();
I2C_SCL_0();
i2c_delay();
}
void i2c_send_byte(uint8_t byte)
{
uint8_t i;
for(i = 0;i<8;i++)
{
I2C_SCL_0();
i2c_delay();
if(byte&0x80)
{
I2C_SDA_1();
}
else
{
I2C_SDA_0();
}
byte <<= 1;
i2c_delay();
I2C_SCL_1();
i2c_delay();
}
I2C_SCL_0();
i2c_delay();
}
uint8_t i2c_read_data(void)
{
uint8_t i;
uint8_t value;
value = 0;
for(i =0; i<8;i++)
{
value <<= 1;
I2C_SCL_0();
i2c_delay();
I2C_SCL_1();
i2c_delay();
if(I2C_READ_SDA())
{
value++;
}
}
I2C_SCL_0();
i2c_delay();
return value;
}
int8_t i2c_read_reg(uint8_t dev_addr, uint8_t reg_addr, uint16_t *p_data)
{
uint8_t ucAck = 0;
uint8_t ValBuf[6] = {0};
uint8_t prcRegVal = 0;
ValBuf[0] = dev_addr << 1;
ValBuf[1] = reg_addr;
ValBuf[2] = (dev_addr << 1) | 0x01;
i2c_start();
i2c_send_byte(ValBuf[0]);
ucAck = i2c_wati_ack();
if(ucAck)
{
goto cmd_fail;
}
i2c_send_byte(ValBuf[1]);
ucAck = i2c_wati_ack();
if(ucAck)
{
goto cmd_fail;
}
i2c_start();
i2c_send_byte(ValBuf[2]);
ucAck = i2c_wati_ack();
if(ucAck)
{
goto cmd_fail;
}
ValBuf[3] = i2c_read_data();
i2c_ack();
ValBuf[4] = i2c_read_data();
i2c_ack();
ValBuf[5] = i2c_read_data();
i2c_ack();
i2c_stop();
prcRegVal = CRC8_Calc(ValBuf,5);
if(prcRegVal == ValBuf[5])
{
*p_data = (ValBuf[4] << 8) + ValBuf[3];
return 0;
}
else
{
return -2;
}
cmd_fail:
i2c_stop();
return -1;
}
float mlx90614_read_temp(uint8_t devAddr)
{
float temp;
uint16_t data;
if( 0 == i2c_read_reg(devAddr,0x07,&data))
{
temp = data*0.02 - 273.15;
}
else
{
temp = MLX90614_TEMP_ERR;
}
return temp;
}
使用软件模拟IIC要注意下这个I2C_SCL_0()、I2C_SCL_1()、I2C_SDA_0()、I2C_SDA_1() 这四个函数里面的延时一定要有不能删,删除的效果大家可以自己试下。
mlx90614.h
#ifndef __MLX90614_H
#define __MLX90614_H
#include "gd32vw55x.h"
#define MLX90614_TEMP_ERR -99
#define MLX90614_TOBJ1 0x07
#define MLX90614_ADDR 0x5a
void i2c_delay(void);
void i2c_start(void);
void i2c_stop(void);
uint8_t i2c_wati_ack(void);
void i2c_ack(void);
void i2c_nack(void);
void i2c_send_byte(uint8_t byte);
uint8_t i2c_read_data(void);
uint8_t CRC8_Calc (uint8_t *p, uint8_t len);
int8_t i2c_read_reg(uint8_t dev_addr, uint8_t reg_addr, uint16_t *p_data);
float mlx90614_read_temp(uint8_t devAddr) ;
void i2c_init(void);
#endif




















 到【灌水乐园】发言
到【灌水乐园】发言








