



 文章介绍了动态规划算法的核心思想,包括最优子结构和无后效性,以及与暴力递归的区别。通过实例展示了如何用动态规划解决小白兔拔萝卜问题,找到获取最大萝卜数的路径。动态规划的步骤包括定义状态、初始化、状态转移方程和计算结果,并强调了其在解决实际问题中的高效性。
文章介绍了动态规划算法的核心思想,包括最优子结构和无后效性,以及与暴力递归的区别。通过实例展示了如何用动态规划解决小白兔拔萝卜问题,找到获取最大萝卜数的路径。动态规划的步骤包括定义状态、初始化、状态转移方程和计算结果,并强调了其在解决实际问题中的高效性。
动态规划是一种解决多阶段决策过程最优化问题的算法。它将大问题分解为小问题,通过维护中间状态的方式,避免了暴力求解的重复计算,来提高求解的效率。
动态规划与暴力递归的区别在于,动态规划会将中间状态记录下来,避免重复计算,而暴力递归则没有这个优化。
动态规划通常分为以下几个步骤:
- 定义状态:定义问题的状态,通常使用一维或二维数组来表示。
- 初始化状态:将问题的初始状态赋值到数组中。
- 状态转移方程:定义状态之间的转移方式,通常使用递推公式表示。
- 计算结果:根据状态转移方程计算问题的最终结果。
动态规划算法具有以下性质:
- 最优子结构:问题的最优解可以由子问题的最优解推导得出。
- 无后效性:某阶段状态一旦确定,就不受这个状态以后决策的影响。
- 重复子问题:问题可以被分解成许多子问题,这些子问题具有重叠的部分。
动态规划算法可以用来解决很多实际问题,下面以一个游戏:使用动态规划实现小白兔拔萝卜问题
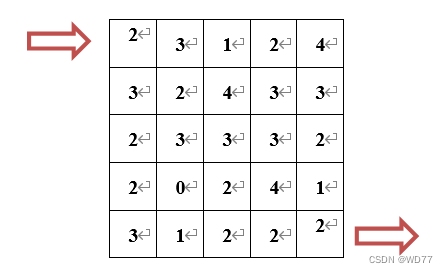
表格中显示的是一片萝卜田,小白兔从田地的左上角进入,在右下角离开,每次必须选择向下或者向右走一格,并拿走格子里的萝卜。求小白兔获得的最大萝卜数量和走过的路径。
#include<stdlib.h>
#include<stdio.h>
#include<time.h>
const int M=5; //萝卜地行数
const int N=5; //萝卜地列数
int v[M][N]; //萝卜地中的萝卜数
int c[M][N]; //每块地从(0,0)出发的最优萝卜数
int dituiluobo(int m,int n)
{
int i,j;
c[0][0]=v[0][0];
for(i=1;i<=m;i++)
c[i][0]=c[i-1][0]+v[i][0];
for(j=1;j<=n;j++)
c[0][j]=c[0][j-1]+v[0][j];
for(i=1;i<=m;i++)
for(j=1;j<=n;j++)
{
if(c[i-1][j]>=c[1][j-1])
c[i][j]=c[i-1][j]+v[i][j];
else
c[i][j]=c[i][j-1]+v[i][j];
}
return c[m][n];
}
void TrackSolution(int m,int n)
{
printf("%d,%d\n",m,n);
while(m!=0||n!=0)
{
if(m==0)
{
n--;
printf("%d,%d\n",m,n);
}
else if(n==0)
{
m--;
printf("%d,%d\n",m,n);
}
else if(c[m-1][n]>=c[m][n-1])
{
m--;
printf("%d,%d\n",m,n);
}
else
{
n--;
printf("%d,%d\n",m,n);
}
}
}
int main()
{
int i,j,start,end,t,count;
printf("随机生成萝卜地如下:\n");
for(i=0;i<M;i++)
{
for(j=0;j<N;j++)
{
v[i][j]=rand()%10;
c[i][j]=0;
printf("%d\t",v[i][j]);
}
printf("\n");
}
count=dituiluobo(M-1,N-1);
printf("萝卜矩阵如下:\n");
for(i=0;i<M;i++)
{
for(j=0;j<N;j++)
{
printf("%d\t",c[i][j]);
}
printf("\n");
}
printf("TrackSolution(追踪解)如下:\n");
TrackSolution(M-1,N-1);
return 1;
}
动态规划算法非常强大,可用来解决很多实际问题。在应用动态规划算法时,需要注意定义状态、初始化状态、状态转移方程和计算结果等步骤,同时可以通过优化策略来提高算法的效率。

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









