 享界S9:豪华尊贵感的极致体验
享界S9:豪华尊贵感的极致体验




文 | AUTO芯球
作者 | 响铃
这哪是40-50万的车,哪怕是200万的车,都不一定能给这样的豪华尊贵感啊
享界S9我已经提前坐进来了啊

憋不住,香
你看这后排零重力座椅,这个腿托可以自由调节,这很可能是全球首款有零重力座椅的桥车啊,左侧老板位虽然没有零重力,但也可以自由调前后和躺仰的幅度,
你想想,这样,把整个窗帘一按,就可以躺下休息了,平时你熬夜多,常出差,现在呢,司机在前面开,你就可以真正安安稳稳睡一觉

你看,电动遮阳帘也被安排上了啊
我们的问界M9是手动的啊,这对比,我有点不开心了啊
这玻璃隐私性做得好,从外面看完全看不到车里面,但里面从外面看,特清晰啊
这个细节我必须说下,老板位头部是隐藏在最后这块小窗这里,跟迈巴赫一样

这个投影仪更宽更薄,左右两边华为SOUND音响系统卓越系列,我估计还集合了其他功能
我平时开M9,这两个功能用起来真上瘾啊
中午放倒零重力座椅躺平
打开激光投影看个电影,听着华为SOUND音响
你说你憋不憋得住
中间扶手有一个屏幕,可以自由调节角度,和迈巴赫的很像,我的问界M9就没有啊,伤心

另外呢,这中央扶手还可以收起来,那就是一个5座,家用也完全没问题
还有冷暖箱,半导体制冷的,最低可以调到3°,没有带压缩泵,它就不会占用后备箱的空间,这样后备箱不但是全平的,装的东西也多了。


电吸门也有,这玩意用起来真的回不去了,优雅,仪式感满满,
老余之前说了
享界S9用的也是途灵智能底盘,
这最大的优点,就是可以用激光雷达提前探知路况,
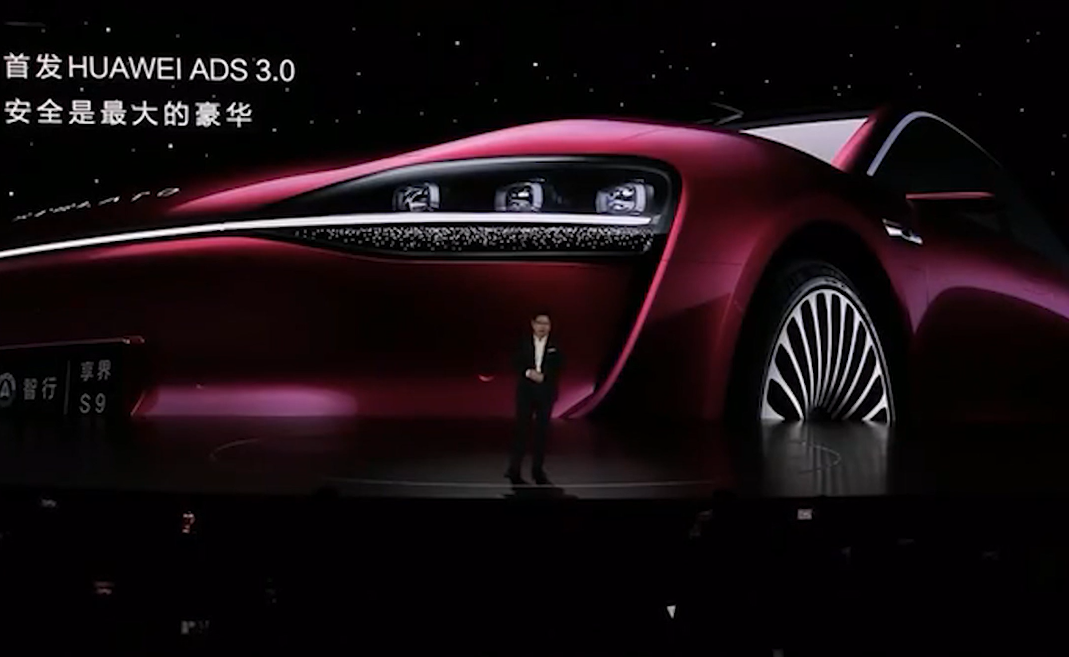
而且会首发华为ADS3.0,再加上192线4D激光雷达,还搭载纯血鸿蒙
开起来坐起来啥感受
微博CEO那句话怎么说的:超豪华舒适
只可惜,今天我们不能试驾
我还特地扒了下,应该是两款电池:
97.6kWh,续航申报是816公里,这就算打7折,也有560公里
还有一个79.9kWh的,续航申报672公里,
感觉这个车真正的竞品不是7系和A8,反而是迈巴赫和帕纳梅拉行政这种
按45-55万的定价,这就是降维打击
哎,只可惜我的钱包不够争气,必须先把宝马X5卖了,现在回家凑钱去

对了对了,内饰看完了,外观也让我憋不住啊
作为问界M9车主的我必须说一句:羡慕
明明都是华为鸿蒙智行的车
这差距,都在细节里啊
你看啊
都是鲲鹏展翅的前脸造型,但很明显,这低趴的姿态,看起来档次更高,
还有这百万像素大灯,ISD的矩阵式大灯,这灯带更细腻了是不是,
人家说,这是人间星河,复刻了星座图,天秤 摩羯、双鱼座的你可以找找你自己的星座,如果这灯也能和M9一样,能对外投影唱K,看电影,我就更羡慕了

还有
你看后视镜都升级了,流媒体的,中间也加了这条黑色拼接线,

我那问界M9上也有,不过这个感觉档次又提升了。这种流媒体后视镜最直接的两个好处,一是下雨天能看得很清楚,我必须承认,长沙6月底不是下大雨吗,我开问界M9出去两侧玻璃是看不太清的,可能是我贴了玻璃膜的原因,另外有了这流媒体后视镜左转右转倒车的时候,头转移的幅度也不要那么大,整体档次提高了也更加安全了。
侧窗呢,没有水切 是纯平的设计,这种旗舰高端轿车要的就是最低风阻
还有啊,这 21寸锻造轮毂,明明和M9是同家的亲兄弟,怎么放在轿车上,就更细腻,更沉稳了呢。

还有还有,这车长5160,轴距就有3050 , 更恐怖的是乘员舱足足3米5,你说这空间,躺着完全没问题啊,而且我找了下数据,转弯直径只有11米多,这D级行程轿车拐弯掉头就跟开个mini一样的轻松了啊
哎呀,我恨不得啊,现在就把宝马X5换掉,把S9的尾款付掉了。
*本文图片均来源于网络
聚焦智能汽车,助力关键决策。

















 2681
2681

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









