




 本教程详细介绍了如何在GitHub上建立个人仓库,本地安装Git,创建并管理本地仓库,以及如何将本地仓库与远程仓库进行同步。涵盖了从初始化仓库、添加文件、提交更改到推送至远程仓库的全过程。
本教程详细介绍了如何在GitHub上建立个人仓库,本地安装Git,创建并管理本地仓库,以及如何将本地仓库与远程仓库进行同步。涵盖了从初始化仓库、添加文件、提交更改到推送至远程仓库的全过程。
git使用教程
1.在github等上面建立自己的仓库,如图:
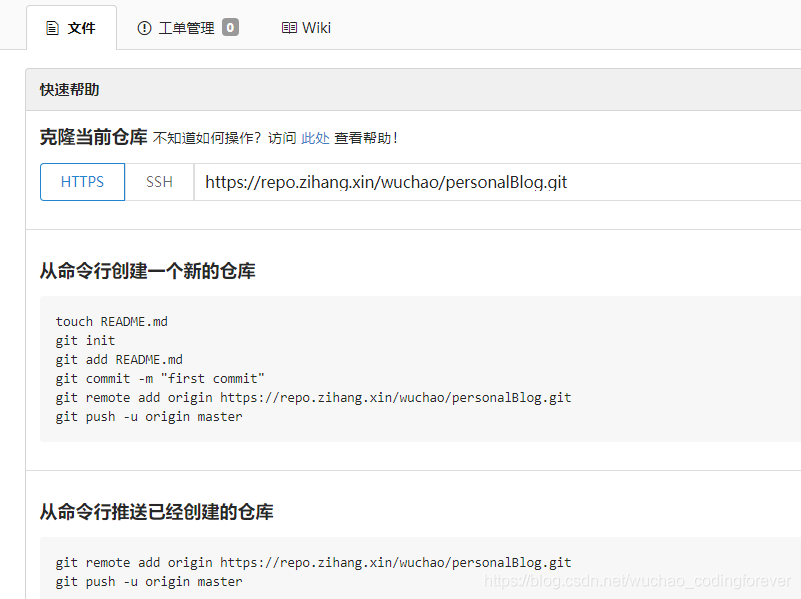
保留下来
https://repo.zihang.xin/wuchao/personalBlog.git
2.在本机上安装git
3.创建本地仓库

4.将本地仓库添加git
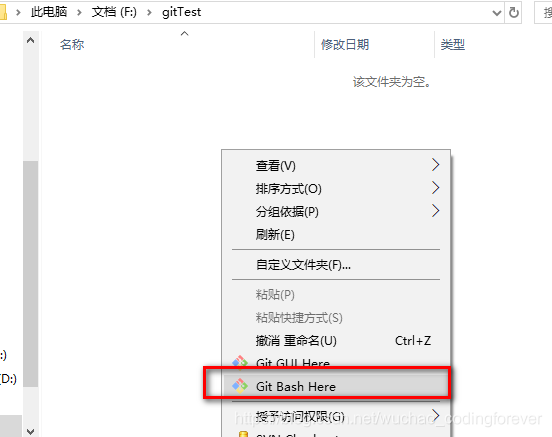
1)进入目录,右键,找到git bash,如图:
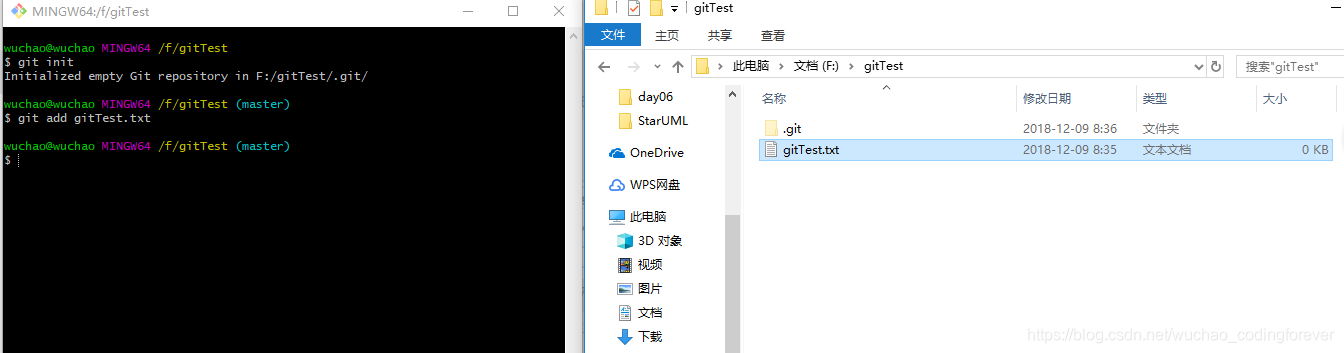
2)打开git bash,将当前目录添加git 功能,在控制台如图输入 git init ,如图:
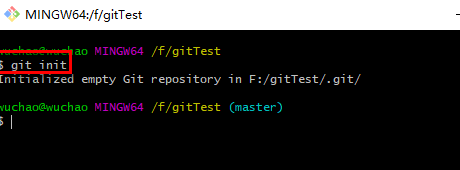
此时,当前目录会自动创建一个文件

3)在本地仓库中新建一个文件,并将文件添加到git中 命令:git add xxx.xx
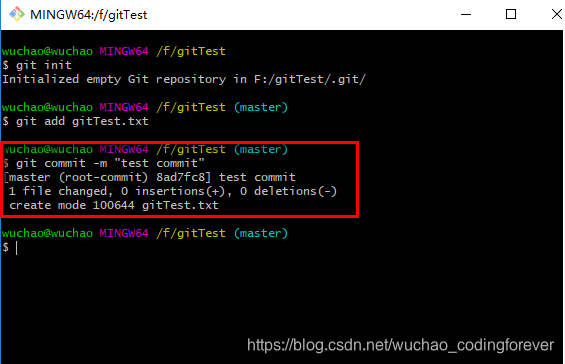
4)给远程仓库中提交 命令 git commmit
5)链接到远程仓库 命令 git remote add xxx yyyy
xxx : 远程仓库的名字
yyy: 远程仓库的链接地址
如图:

6)将本地仓库的数据push 到远程仓库 命令 git push -u xxx master
xxx: 远程仓库的名字
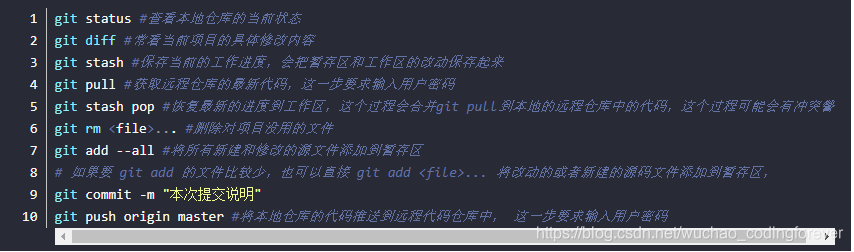
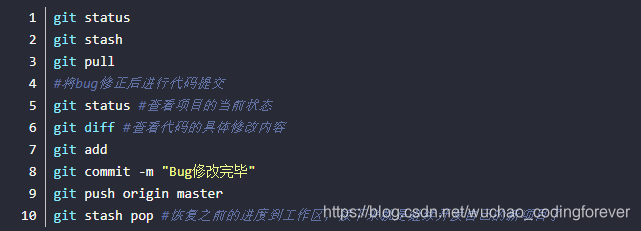
7) 常用命令:
输入用户名: git config --global username xxxx
输入密码: git config --global emal yyy
没有配置用户名 密码 可以使用此条命令:
git config --system --unset credential.helper

















 160
160

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









