



树莓派驱动的流动注射系统用于电化学连续监测平台
摘要
对生物传感平台的兴趣程度使其能力的有效测试需求凸显出来。当在体内应用之前考察传感器对浓度随时间变化趋势进行连续监测的特性时,这一需求尤为关键。此外,在个性化医疗实践中,迫切需要引入一种 robust 的方法来表征和参数化人体代谢的高度可变响应。本文旨在提出一种新型解决方案,用于设计可评估连续监测系统性能的自动流动注射环境。该装置已成功验证可用于在缓冲溶液中重现对乙酰氨基酚浓度趋势。
一、引言
迄今为止,连续监测的概念已在不同的医疗应用中得到广泛应用,用于控制患者体液中的内源性[1],[2]和外源性[3],[4]化合物浓度。药物监测服务的需求十分广泛,特别是在个性化医学背景下,以确保对特定患者用药的有效性和安全性[5]。这一点对于难以处理的药物尤其重要,例如麻醉剂。事实上,麻醉诱导和维持依赖于三种主要化合物(麻醉剂、镇痛剂和肌松剂)在注入患者静脉时达到恰当的平衡[6]。在类似实践中,为了向患者提供最佳药物剂量,必须了解药物给药后的溶出行为[7]。这被称为药物药代动力学(PK)模型,用于模拟药物的吸收、分布、代谢和排泄过程[8]。电化学传感器被认为是一种合适的技术,可用于监控患者体液中药物浓度的变化。由于其在测量过程中无需电极表面更新,并且可通过采用合适的传感材料来评估其选择性,因此适用于多种不同应用[9]。
对于麻醉等依赖人体代谢反应估计的应用而言[10],要找到一种实验方法来测试传感器性能非常困难。为了重现给药后的药物趋势,需要进行药物剂量的溶出试验。这些实验若不实现自动化,则极为耗时,因为需要大量的样品。因此,理想的解决方案是采用自动化溶出系统,以节省时间并提高传感器验证过程中的分析可重复性[7]。已提出多种方法用于评估自动测试程序[11],[12],[13]。然而,这些溶出装置无法在较长时间内重现药物的完整药代动力学(PK)曲线[7]。为此,本文旨在介绍该系统的实现、设计与验证,即一种流动注射系统,能够在给定的分析溶液基础体积中重现药物浓度时间趋势。用于重现药物 PK 趋势的稀释过程由树莓派电子板控制,该板驱动一个装载药物的注射泵。目标浓度水平由在 Matlab 中实现的药代动力学数学模型计算得出。该系统已通过对染料的经验性验证、pH 变化的实验检测以及对乙酰氨基酚趋势的重现进行了经验和实验性验证。我们选择对乙酰氨基酚是为了证明该系统可用于测试麻醉监测系统的可行性。事实上,对乙酰氨基酚是一种镇痛剂,可被视为一种基准麻醉化合物。
II. 材料与方法
化学品与仪器
来自 D`eco Relief™ 的绿色食用染料用于经验性评估溶解系统性能。用于分析验证的盐酸(HCl)0.01 M 和对乙酰氨基酚(APAP)由 Sigma‐Aldrich™ 提供。30 mM 对乙酰氨基酚储备液通过将 15 mg 粉末溶于 3 ml 磷酸盐缓冲液(PBS)(pH:7.4,10 mM)中配制而成。为了构建和测试该系统,我们采用了:(i) Gilson™ Minipuls 3 蠕动泵,(ii) Braintree Scientific Inc.™ NE‐1000 可编程单通道注射泵[14],(iii) VWR 和 Stuart CB161 搅拌器,(iv) VWR pH 1000 L pHenomenal™ pH 计,(v) 运行 Raspbian Jessie 4.4 的树莓派(RPi)3 型号 B,(vi) Metrohm Autolab™ PGSTAT 101。此外我们还使用了:Duran™ 1 mL A 级容量瓶,1 mL 和 0.5 mL 塑料注射器(∅ 4.699 mm 用于染料和 pH),Tygon™ LMT‐55 蠕动泵管路(∅ 0.38 mm)用于对乙酰氨基酚和 pH 测试,PVC 管(∅ 1 mm)用于染料,内径 ∅ 0.41 mm PTFE(AWG)管路连接注射器针头。采用 Dropsens™ DS 110 丝网印刷电极(SPEs)作为对乙酰氨基酚检测的电化学池。该电极表面集成了碳工作电极(∅ 4mm)、银参比电极和碳对电极。
使用的软件包括:(i) 用于树莓派上 TCP/IP 服务器和注射泵串口通信应用的 Qt Creator 3.2 与 Qt 5.3 库,(ii) Matlab™ 用于注射控制和剂量计算,(iii) Microsoft™ Excel 用于数据分析,(iv) Metrohm Autolab™ NOVA 10.1 用于电化学测量。对乙酰氨基酚检测采用循环伏安法(CV)测量,使用 NOVA 程序施加电压范围从 ‐0.1 V 到 1.1 V,扫描速率为 0.1 V/s。
B. 校准程序
在开始任何测试会话之前,需对所采用的特定蠕动管内的流量进行校准。
这使我们能够建立泵转子速度(每分钟转数 ‐ RPM)与管路流量(毫升/分钟)之间的关系。校准过程包括将泵速设置为不同值,并测量填充给定体积(例如 1 mL)所需的时间。已创建专用的 Excel 工作坊簿,用于输入时间记录和泵速,从而自动计算每组数值对应的流量(毫升/分钟)。此外,通过流量的简单线性回归评估校准曲线。实际上,速度与流量的关系是线性的[15]。
III. 系统配置
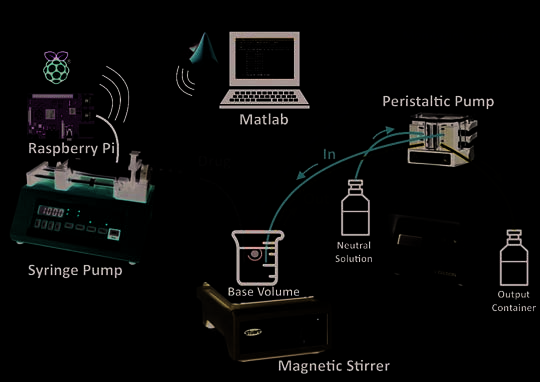
流动注射系统的配置如图1所示。我们可以根据其功能将其结构分为两个主要部分:包括用于增加药物浓度的注射器的部分,以及由蠕动泵组成的用于降低药物浓度的部分。注射泵通过移动板推动装有给药药物的注射器活塞。蠕动泵从基础体积烧杯中抽出溶液,并用中性溶液填充。基础体积烧杯的进出流经过校准,以保持其体积恒定。这两个系统部分以同步方式并行运行,以重现基础体积中的药物浓度趋势。换句话说,在蠕动泵持续用中性溶液稀释基础体积的同时,注射泵注入适量的药物以达到目标浓度水平。在每次测试开始前,蠕动泵已校准并设置为固定恒定流量。树莓派是连接两个部分并使其交互的中央单元。实际上,注射泵通过 USB 端口与树莓派物理连接。树莓派与在个人计算机上运行的 Matlab 通信,Matlab 计算相对于先前浓度和待重现药物趋势的后续注射剂量。最后,树莓派将计算出的注射值发送至注射泵。一旦注射泵接收到命令,便会发送一条确认消息。
A. 树莓派集成
树莓派被用作 Matlab 脚本与注射泵之间的连接。实际上,我们希望利用其主要优势得益于其便携性、低成本以及多种可配置接口(包括 USB 端口和 Wi‐Fi 模块),我们使用 Qt Creator 库开发了一个轻量级控制台应用来处理 TCP/IP 和串行通信。由此,数据可通过无线局域网从 Matlab 发送到树莓派,并转换为泵的串行命令。此外,由于其小巧尺寸,我们还可以在受限空间中使用基于树莓派的系统,并通过远程控制操作。当涉及有毒药物(例如麻醉剂)时,这一点非常有用,因为测试需要在受限且受控的环境中进行。我们项目的最终目标是将系统的驱动智能转移到树莓派上,并消除对个人计算机的需求,以增强和保证系统的便携性。
B. 通信协议
采用两种通信协议:一种用于将数据从个人计算机发送到树莓派,另一种用于将命令从树莓派发送到注射泵。第一种协议基于 TCP/IP,因为树莓派应用程序使用 Wi‐Fi 模块创建无线局域网,个人计算机可作为客户端访问该网络。第二种协议是树莓派 USB 端口与注射泵 RJ‐11 插座之间的 RS‐232。物理连接通过一个自定义适配器实现。
C. 注射泵配置
NE‐1000 注射泵可通过串行通信以手动或编程模式工作。需要配置的主要参数包括:泵送速率、目标体积和注射器直径。根据这些参数,泵会自动计算注射时间,并相应调节活塞速度。该泵可被编程以在不同的泵送阶段进行液体的抽取和注射。每个阶段可以具有不同的泵送速率或目标体积。通过树莓派,我们设置泵每次接收到新的注射命令时执行直接注射。注射过程通过均匀推动注射器活塞来完成,持续注入一定量的药物,以重现药物浓度趋势的线性增加。
D. 注射剂量计算
为了计算重现浓度时间趋势所需的正确注入值,我们需要考虑由恒定速度的蠕动流对基础体积进行的连续稀释。稀释与流量之间的关系由公式(1)表示,该公式确定了初始浓度[Ci]在体积 V 中随着时间(tfi= tf−ti)推移,同时以流量 Q[16]进行稀释时的减少情况。
$$
[Cf] = \frac{[Ci]}{e^{\frac{Q \cdot (tf - ti)}{V}}}
$$
其中[Cf]是最终浓度。
我们可以通过将[Cf]/[Ci] 表示为唯一系数δ(tfi)来简化(1)。如果考虑连续稀释,则 tfi 变为两次连续测量(tn+1 − tn)之间中间时间 tm。因此,在每次注射前,根据(2)计算出所需的后续剂量,以重现药物浓度的目标时间趋势([Ct])。
$$
[Cdose] =
\begin{cases}
[Ct] - ([Cn] \cdot \delta(tm)), & [Ct] \geq [Cn] \cdot \delta(tm) \
0, & [Ct] < [Cn] \cdot \delta(tm)
\end{cases}
$$
其中[Cn]是 t = tn、tm = tn+1 − tn 和[Cdose]处的浓度,[Cdose]为需要注入的浓度。
四、结果与讨论
我们为系统验证安排了三项不同的测试。首先,我们经验地测试了系统的稀释能力。其次,我们通过快速上升的浓度随后下降至稳态阶段来挑战系统。最后,我们使用该系统重现了实际药物给药——镇痛剂 APAP 的升降趋势。
A. 测试结果
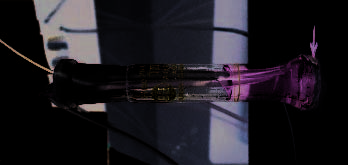
1) 染料测试 :在第一次测试中,我们将绿色食用染料注入水中作为中性溶液。我们设定了一系列在 1 mL 基础体积中的染料注射,蠕动流速为 1 mL/min。剂量按计划随时间线性增加基础体积中的浓度,然后在稀释过程中呈指数下降。测试在搅拌条件下进行(CB161 搅拌器的 9 级搅拌)。测试的视觉结果如图3所示。通过该测试,我们能够从颜色深浅变化中观察到系统如何重现浓度的线性增加和指数下降。
2) pH 水平测试 :在第二次测试中,我们观察到给定溶液中 pH 值(即氢离子浓度 [H⁺])的变化。本测试的主要目的是定量评估系统增加或减少某种化合物或离子浓度的能力。为此,我们使用蒸馏水作为中性溶液,并使用 0.01 M HCl。采用商用 pH 计来检测 pH 变化。因此,通过注入 HCl 实现 pH 降低,对应于 [H⁺] 的增加。我们重现了一个初步阶段,其特征是离子浓度快速增加,随后 [H⁺] 呈指数下降趋势,如图4所示。测试在搅拌条件下进行(CB161 搅拌器的 4 级)。由于我们将 [H⁺] 与本身含有 [H⁺](约 10⁻⁷ M)的蒸馏水混合,因此无法通过此测试评估稀释效率及其准确性。
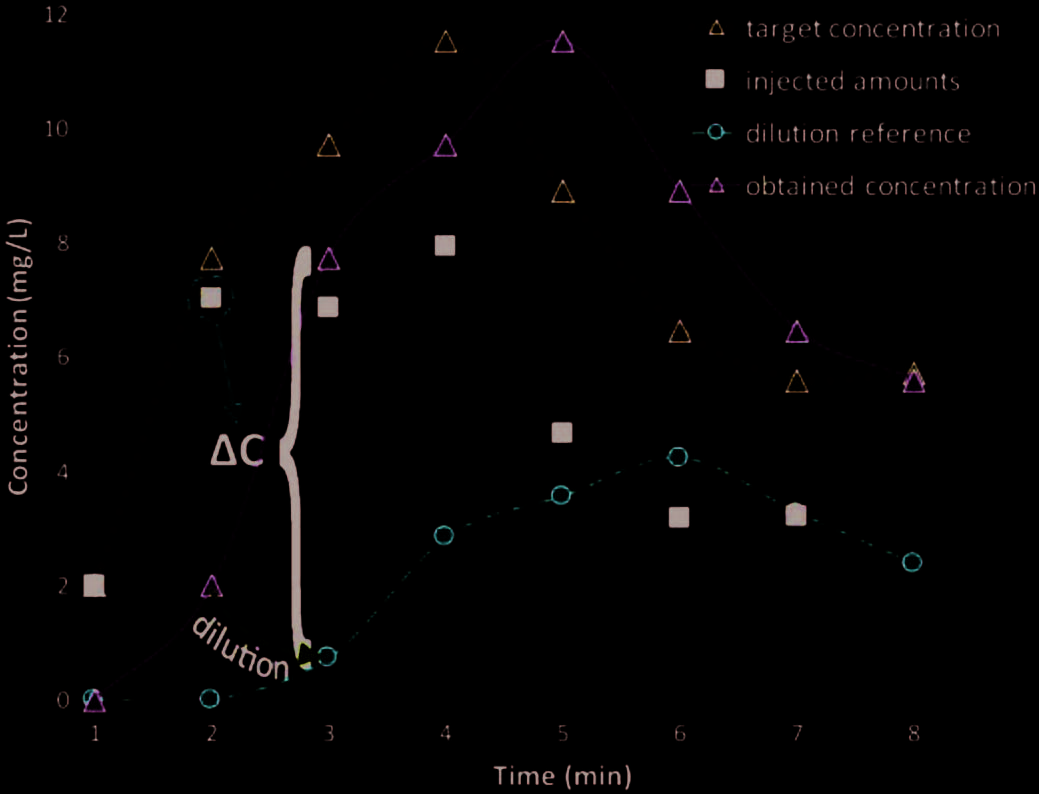
3) 对乙酰氨基酚浓度测试 :最后,我们希望重现类似于实际药物给药的趋势。为此,我们采用对乙酰氨基酚作为基准化合物。该趋势通过将对乙酰氨基酚溶液注射六次(每 75 秒一次剂量),并在接下来的 15 分钟内监测稀释过程获得,如图5所示。基础体积为 6 mL,蠕动流设置为 0.86 mL/min。使用 PBS 溶液作为缓冲溶液。每次测量之间用 200 转/分 VWE 搅拌器搅拌基础体积溶液,以确保药物注射后充分混合。为了量化基础体积溶液中对乙酰氨基酚的浓度,进行 CV 测量。
通过循环伏安技术可直接测量,能够识别出所实现系统的主要权衡因素。这些因素包括:(i) 基础体积相对于注射器注入速度的尺寸(根据注射器尺寸评估),(ii) 蠕动流的恒定速度,(iii) 获得均匀混合溶液所需的搅拌条件。
V. 结论
本文报道了一种流动注射系统的实现与验证。我们系统的主要目标是用于促进和自动化针对医疗应用的连续监测系统的体外测试。实际上,只有通过能够持续监控患者体内药物浓度水平的连续监测系统,才能评估有效药物剂量的给药效果。这些监测设备的表征始于体外实验,而这类实验极为耗时且劳动强度大。在此背景下,我们的系统旨在为传感平台(例如电化学传感器)提供一种更快、更可重复的测试方法。
系统的性能已通过执行不同的测试得到验证。通过这种方式,可以确定系统的主要权衡因素为:(i)基础体积的尺寸与注射器注入速度之间的关系(由注射器尺寸评估得出),(ii)蠕动流的恒定速度,以及(iii)搅拌作用在获得用于检测的均匀混合溶液中的重要性。在我们设定的参数下,成功再现了药物的升降趋势。所获得的趋势类似于药物给药时的人体代谢反应,例如麻醉诱导期间的反应。总体而言,该系统在其固有局限范围内(如管路尺寸、基础体积和注射器体积),根据所选参数,具备再现任意浓度变化趋势的潜力。此外,该系统不仅可以应用于烧杯中容纳的基础体积,还可适用于包含传感器平台的任何流体单元。系统的进一步改进可能通过将可编程蠕动泵连接到系统,可以获得所需效果。这样,在需要静态条件进行测量时,可以中断稀释流。
未来的工作将是将该流动注射系统完全集成到用于麻醉监测的反馈回路系统中[17]。

















 3257
3257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









