



记录我第一次使用docker安装ros环境
`
前言
ros有严格的Ubuntu版本对应的的要求,比如我这20.04系统不能安装ros的humble版本,但是foxy又存在一些问题,这样就不能使用humble对应的ros2了
一、docker是什么?
Docker 是一个开源的容器化平台,用于开发、部署和运行应用程序。它通过将应用程序及其依赖项打包到轻量级、可移植的容器中,实现跨环境的一致性运行。

二、安装步骤
1.引入库
使用鱼香ROS老师的一键安装省时省力:
wget http://fishros.com/install -O fishros && bash fishros
有如下提示,就是在安装过程中。
这一步用于docker的安装验证,检查是否安装成果。

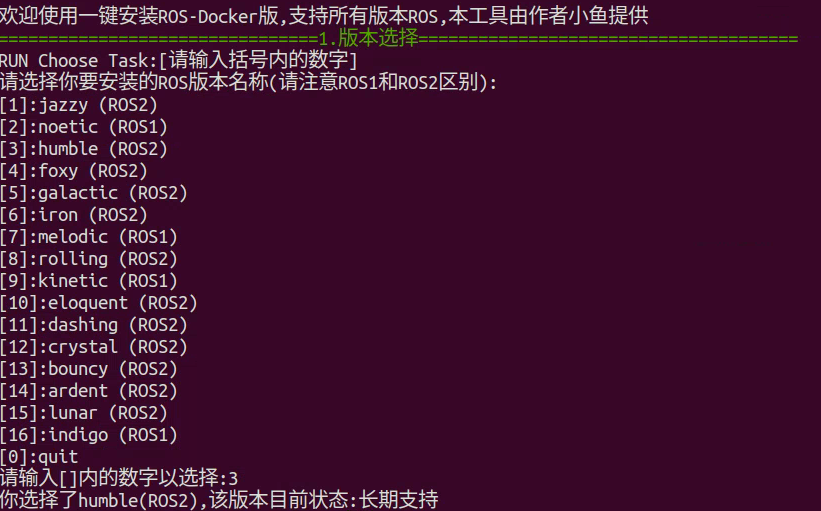
2.安装ros 的docker镜像
选择需要的ros版本,这里我需要的是humble
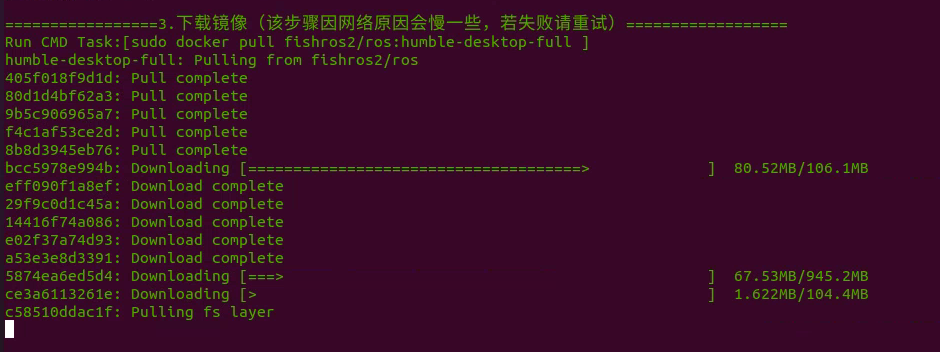
出现如图的绿色下载进度,说明在下载镜像了,如果失败就重新来过
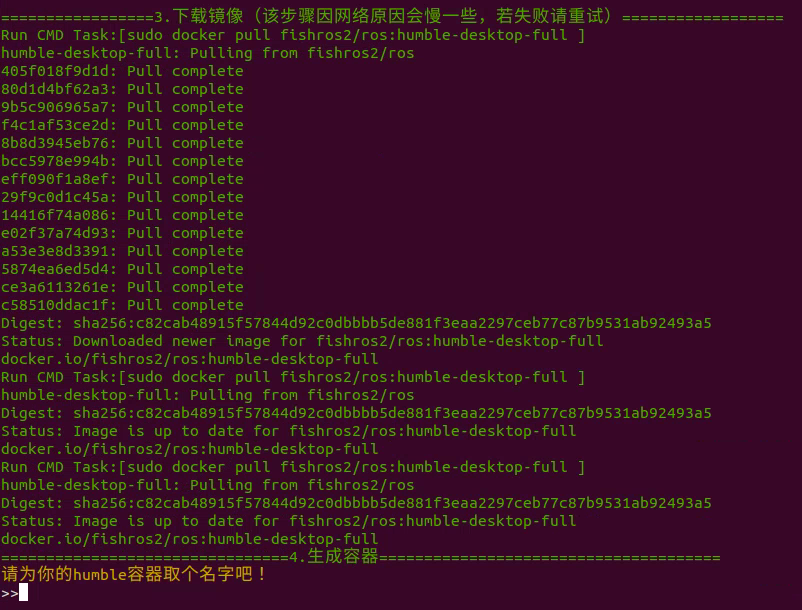
下载完成后会提示给容器起个名字,我这里起的是“humble”
我这里因为是本地工作站,选择的是host

同样的这里选择套餐1,本地运行

如下内容提示,应该是完成安装了,接下来就可以尝试登录了
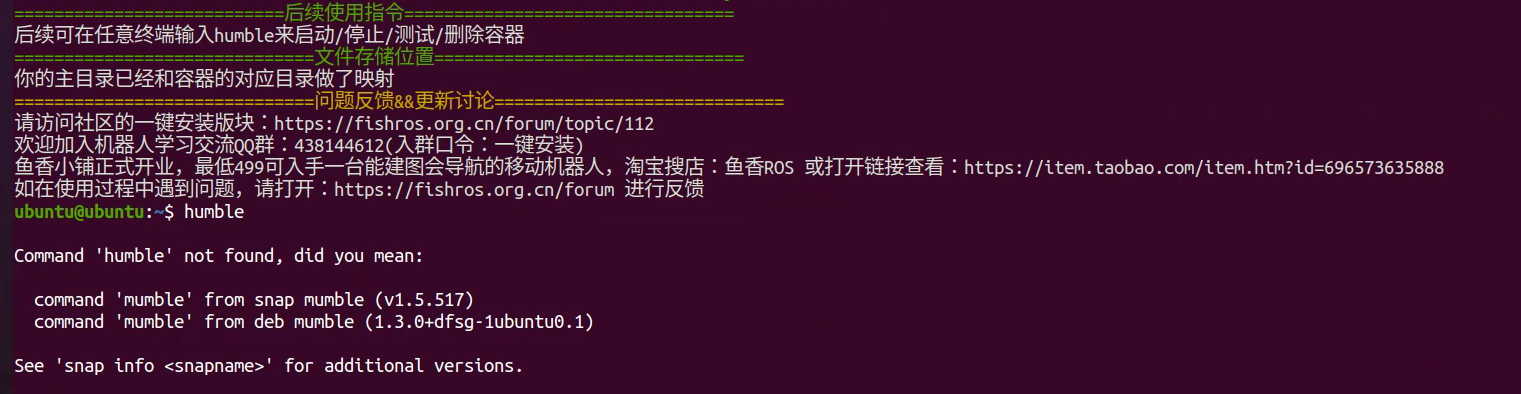
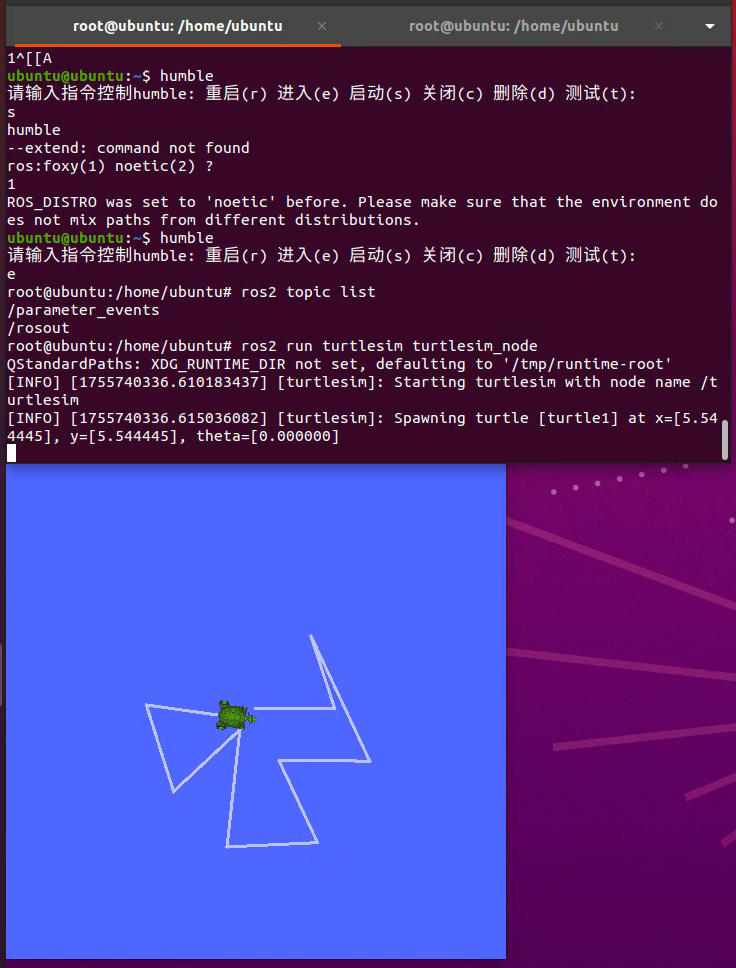
启动命令行(Ctrl+alt+T),输出你命名的容器名称,按“e”进入,(这里有一个小问题,每次重启电脑的时候可能发生无法进入容器的问题,这时候可以先选择“r“或者“s”启动容器,下面小乌龟演示的命令框中有这个过程)


下面就是完成了docker的进入

如下的的提示,就是拉取镜像的过程,等全部下载完成,就会能看得到镜像文件
同样的使用小乌龟示例完成humble的验证。
总结
提示:不积跬步无以至千里,不积小流无以成江河:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了使用快捷安装docker的使用,而自己安装和远程服务器的安装还有很多小问题,特别是Isaac sim在docker的安装,目前我孩在进行,等我完成并记录,再与大家分享。

















 5150
5150

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









