




 本文详细介绍使用STM32F103RCT6最小系统板与HC-SR04超声波模块、MPU6050陀螺仪模块进行硬件连接及软件编程的方法。重点讲解了超声波测距原理及实现过程,包括IO触发、信号发送接收及距离计算。同时,文章提及了由于STM32供电电压限制,需额外使用锂电池降压为传感器供电的问题。
本文详细介绍使用STM32F103RCT6最小系统板与HC-SR04超声波模块、MPU6050陀螺仪模块进行硬件连接及软件编程的方法。重点讲解了超声波测距原理及实现过程,包括IO触发、信号发送接收及距离计算。同时,文章提及了由于STM32供电电压限制,需额外使用锂电池降压为传感器供电的问题。
主要元器件
HC-SR04
MPU6050
1.44寸TFT彩屏
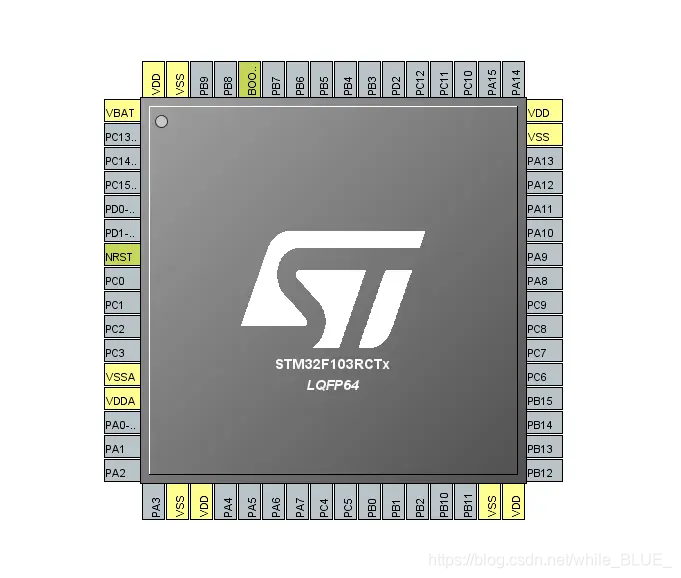
STM32F103RCT6最小系统板(下图)
主要引脚
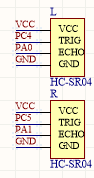
HC-SR04超声波
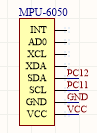
MPU-6050陀螺仪
工作原理
(1)采用IO触发测距,给至少10us的高电平信号;
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间
测试距离=(高电平时间*声速(340M/S))/2;
注意
相应的功能的.c和.h程序都放在HARDWARE文件夹中。
因为STM32只能提供3.3V,而HC-SR04和MPU6050都需要接5V的VCC,否则无法正常工作(这里的坑困扰了我好久,用了7个超声波模块来回检测),所以我用7.2V锂电池通过降压至5V给模块供电。
附下载链接


















 490
490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









