





 本文详细介绍了如何在Ubuntu 19.04上安装OpenJDK 8,包括从官网下载OpenJDK 8,文件移动与解压,设置环境变量以及验证安装成功的步骤。
本文详细介绍了如何在Ubuntu 19.04上安装OpenJDK 8,包括从官网下载OpenJDK 8,文件移动与解压,设置环境变量以及验证安装成功的步骤。
Ubuntu19.04 安装OpenJDK 8
环境信息:
OS:Ubuntu19.04
OpenJDK:8
Ubuntu18.04 安装Jdk1.8 见–> 链接?
1.去OpenJDK官网下载
官网 --> 选择 java SE 8 --> 选择 Oracle Linux 6.1 x64 Java Development Kit (md5) 164 MB 下载连接

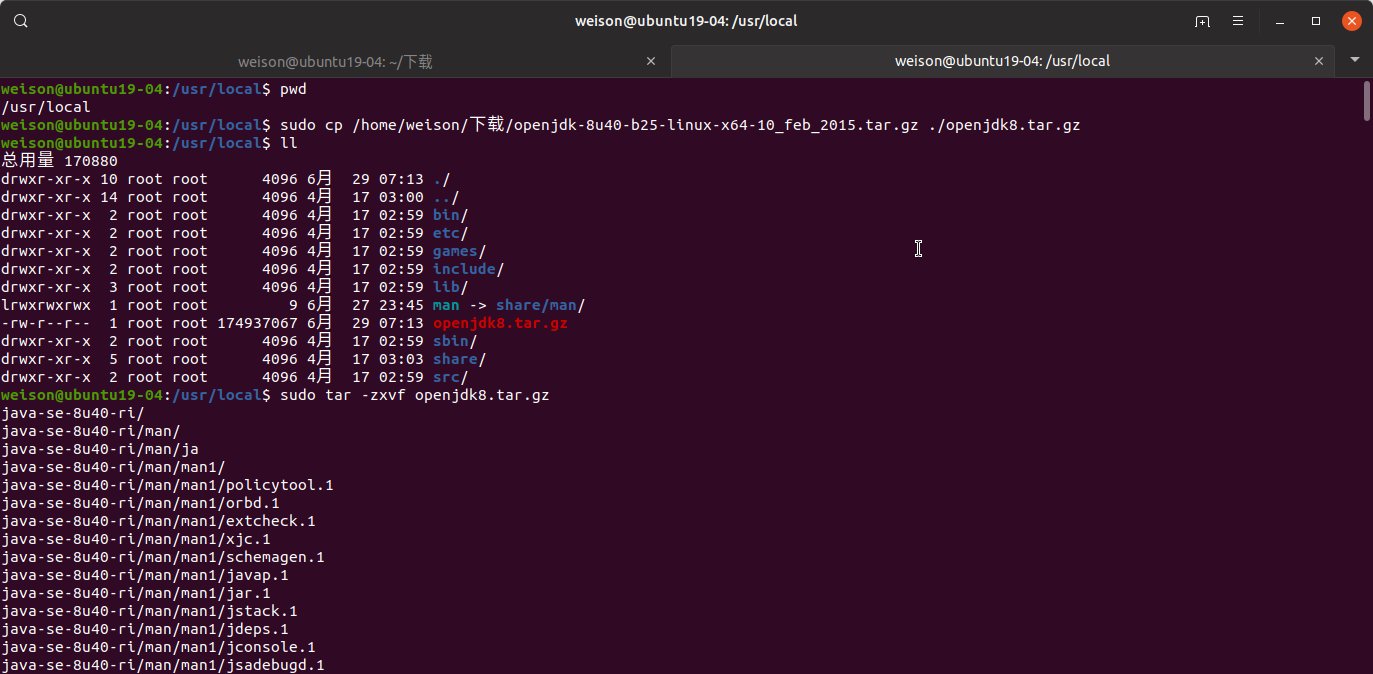
2.移动解压
## 1 将文件从下载目录 挪到/usr/local下
sudo cp /home/weison/下载/openjdk-8u40-b25-linux-x64-10_feb_2015.tar.gz ./openjdk8.tar.gz
## 2 解压
sudo tar -zxvf openjdk8.tar.gz
移动解压:
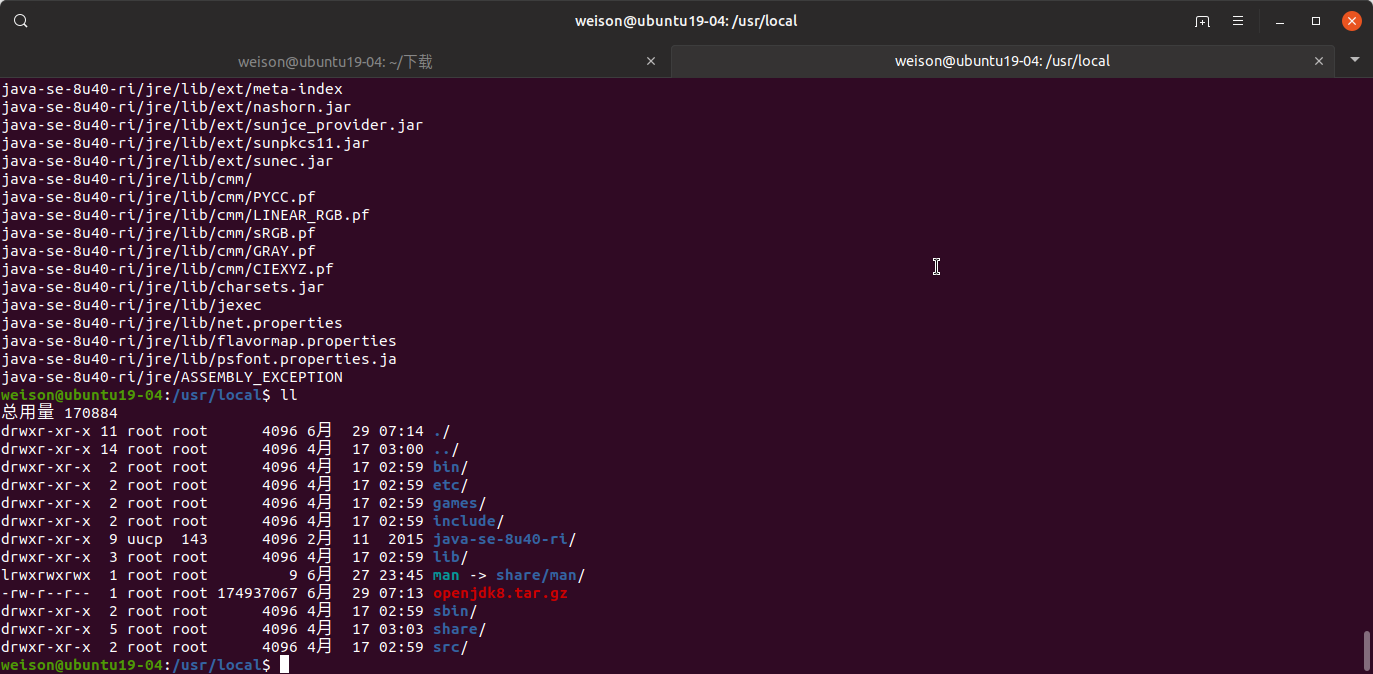
解压后:
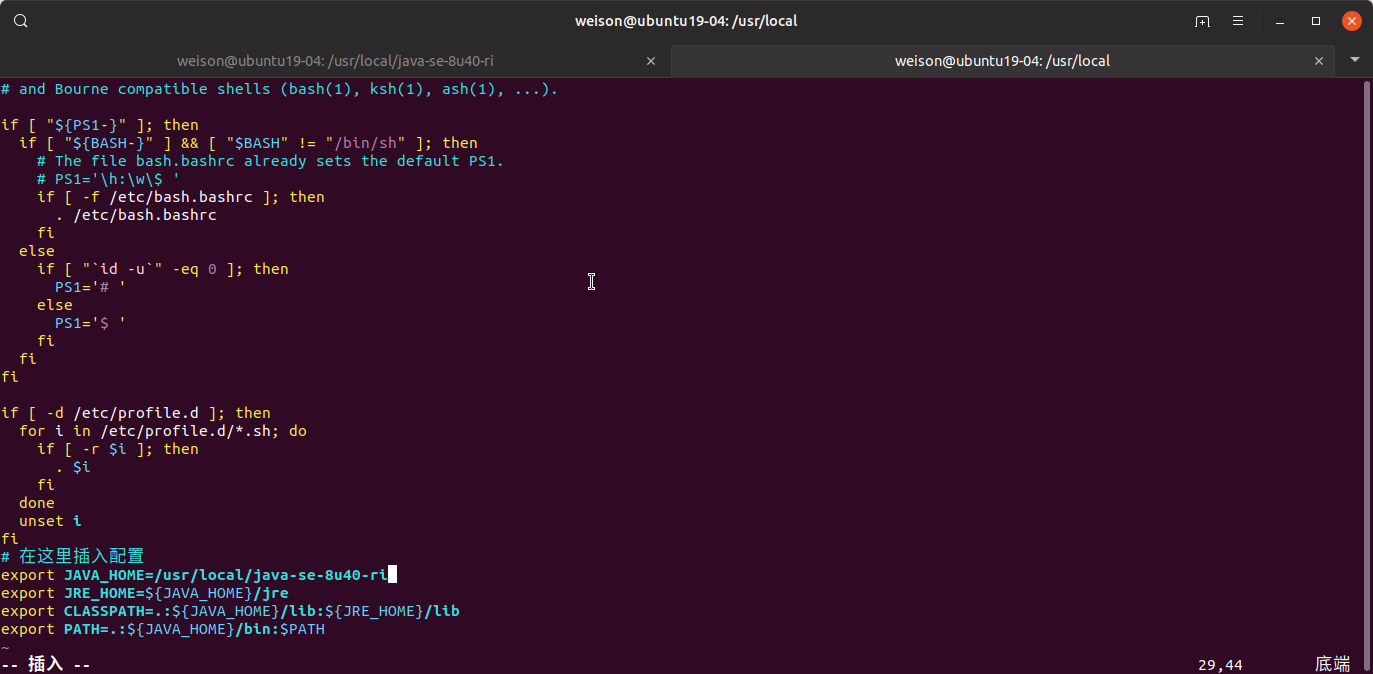
3.设置环境变量
- 3.1 方案一:修改全局配置文件,作用于所有用户:
sudo vim /etc/profile
export JAVA_HOME=/usr/local/java-se-8u40-ri
export JRE_HOME=${JAVA_HOME}/jre
export CLASSPATH=.:${JAVA_HOME}/lib:${JRE_HOME}/lib
export PATH=.:${JAVA_HOME}/bin:$PATH
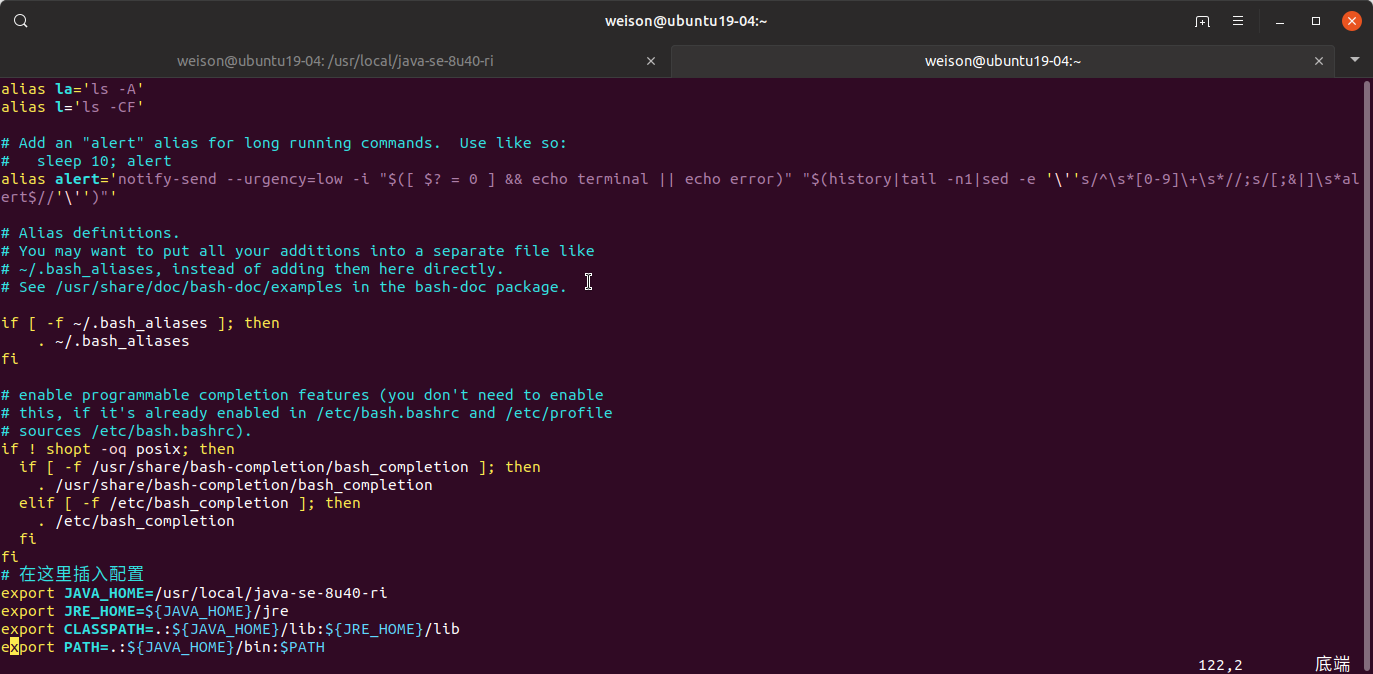
- 3.2 方案二:修改当前用户配置文件,只作用于当前用户:
sudo vim ~/.bashrc设置与上一样
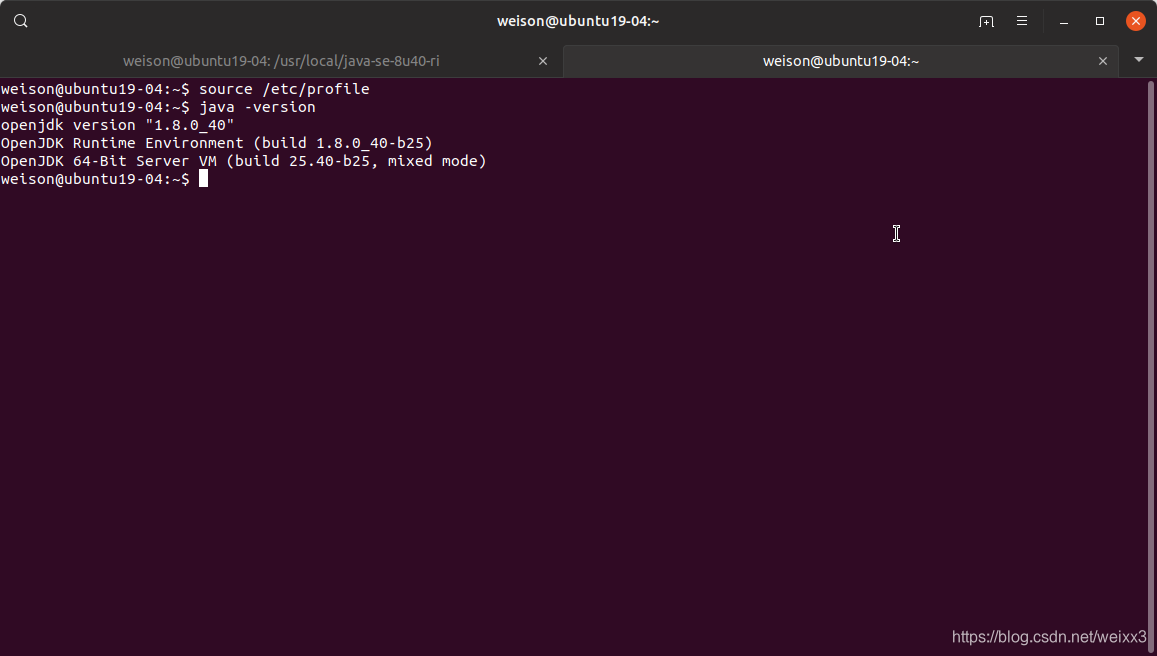
4.使修改的配置立刻生效
##对应方法一:
source /etc/profile
##对应方法二:
source ~/.bashrc
5.检查是否安装成功
java -version

















 1491
1491




 到【灌水乐园】发言
到【灌水乐园】发言







