




entity和primitive的相同代码
模型运动离不了两个点,时间和当前时间对应的位置,也就是要设置一个差值集合
const position = new Cesium.SampledPositionProperty()
这个api 是用于存储类似可以这样理解存储时间对应位置的集合
[ { time:2025.15.02.04,position:{xyz}},
{ time:2025.15.02.05,position:{xyz}}
]
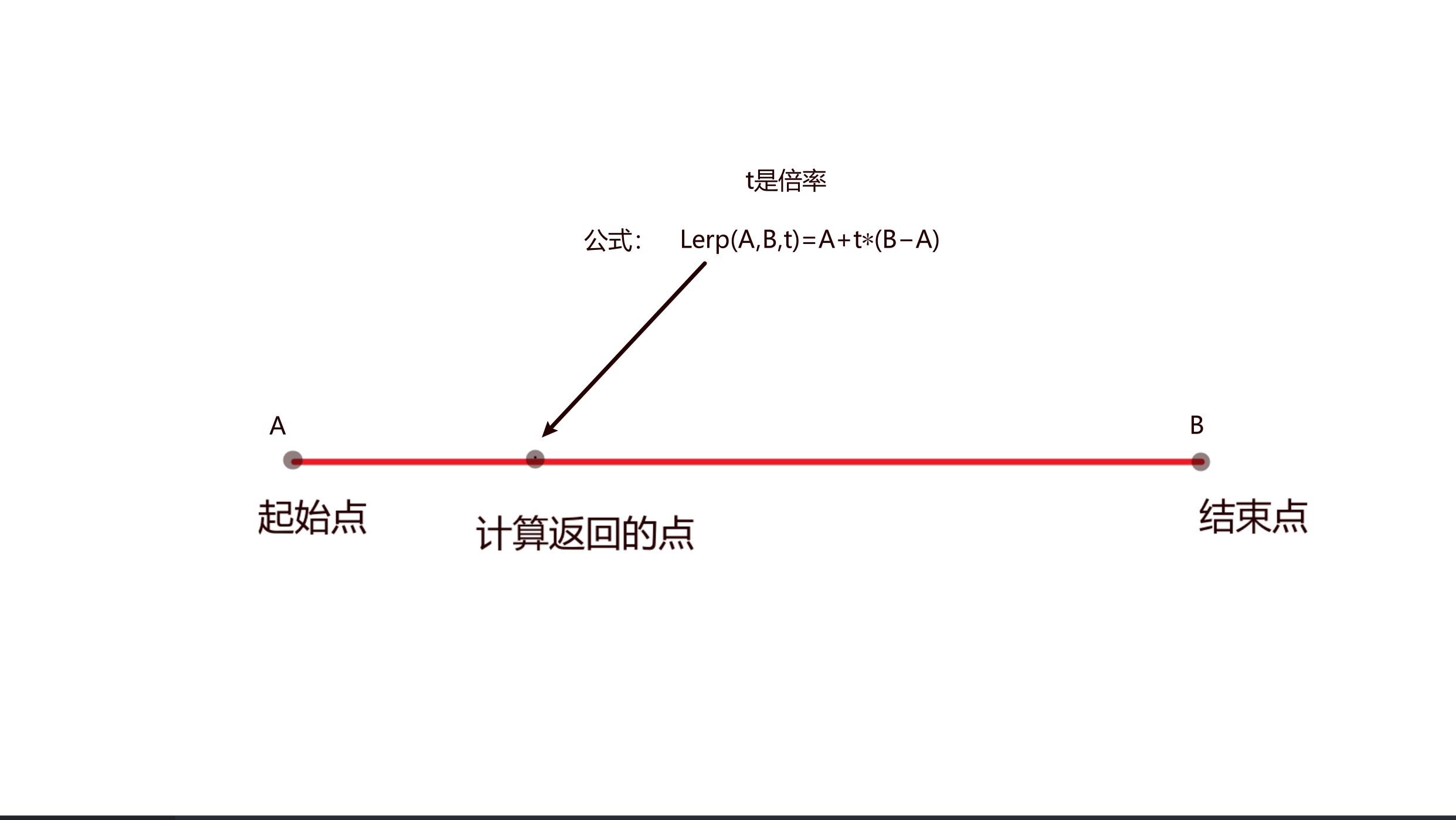
Cesium.Cartesian3.lerp(startPosition,endPosition, locationFactor, new Cesium.Cartesian3())
1,起始位置2,结束位置3,计算差值比率,4,返回的格式
这个api是计算两点中间的一个差值点,类似这样的
设置飞行的开始的、结束的,以及需要的总时间
const start = Cesium.JulianDate.fromDate(new Date())
const totalSeconds = 10
const stop = Cesium.JulianDate.addSeconds(
start,
totalSeconds,
new Cesium.JulianDate()
) //这个api类似一个求加 起始时间一直是最新的间隔一直是10s 结束时间一直是当下时间的后10s
//关于cesium的cesium的一些配置 类似绑定时间
viewer.clock.startTime = start.clone() // 开始时间
viewer.clock.stopTime = stop.clone()
viewer.clock.currentTime = start.clone() //将当前时间设置为开始时间
viewer.clock.clockRange = Cesium.ClockRange.LOOP_STOP
viewer.clock.shouldAnimate = true // 开始动画 为false时,根据设定的时间
viewer.timeline.zoomTo(start, stop)
viewer.timeline.container.style.display = 'none' //隐藏时间线
定义起始位置和结束位置
const startPosition = new Cesium.Cartesian3(
-2379556.799372864,
-4665528.205030263,
3628013.106599678
)
const endPosition = new Cesium.Cartesian3(
-2379603.7074103747,
-4665623.48990283,
3627860.82704567
)
效果优化
这里要有个计算方法,这个计算是为了效果,位移一开始的速度为0实现一个加速度的过程
100等分的目的是为了求0-1直接的数
const numberOfSamples = 100
for (let i = 0; i <= numberOfSamples; ++i) {
const factor = i / numberOfSamples
const time = Cesium.JulianDate.addSeconds(
start,
factor * totalSeconds,
new Cesium.JulianDate()
)
//这里也是一个累加的函数,输入一个时间,加上一个factor * totalSeconds,计算时间,返回一个新时间
// time=0.1时
const locationFactor = Math.pow(factor, 2)
//0.0001
const location = Cesium.Cartesian3.lerp(
startPosition,
endPosition,
locationFactor, //t
new Cesium.Cartesian3()
) //计算差值,返回介于两个点之间的位置。第三个是差值的倍率
// Lerp(S,E,t)=S+t∗(E−S)
// 计算结果
//location = new Cesium.Cartesian3(
// -2379556.804063668, // x
// -4665528.21455875, // y
// 3628013.091371722 // z
// );
position.addSample(time, location) //添加样本
}
entity加载
const vehicleEntity = await viewer.entities.add({
position: position,
orientation: new Cesium.VelocityOrientationProperty(position),
model: {
uri: '/knowledge/model/modelNew.gltf',
runAnimations: false, //是否开启模型的自带动画。
scale: 0.1,
maximumScale: 20,
},
})
console.log(vehicleEntity, 'vehicleEntity')
viewer.trackedEntity = vehicleEntity
vehicleEntity.viewFrom = new Cesium.Cartesian3(-10.0, 7.0, 4.0)
补充下,这里官网加载gltf的方式是Cesium.Model.fromGltfAsync()是用primitives添加的,这里用entity的话用的model添加,Cesium.Model.fromGltfAsync()用在entity上不报错也不显示模型。
这个方式加载的无法获取模型节点,但是容易获取模型动画。模型的动画会在''出厂''的时候设置,你要是找不到就找建模师添加,存在一个集合里调api获取,model.activeAnimations 获取集合。
稍微多说两嘴 orientation: new Cesium.VelocityOrientationProperty(position),
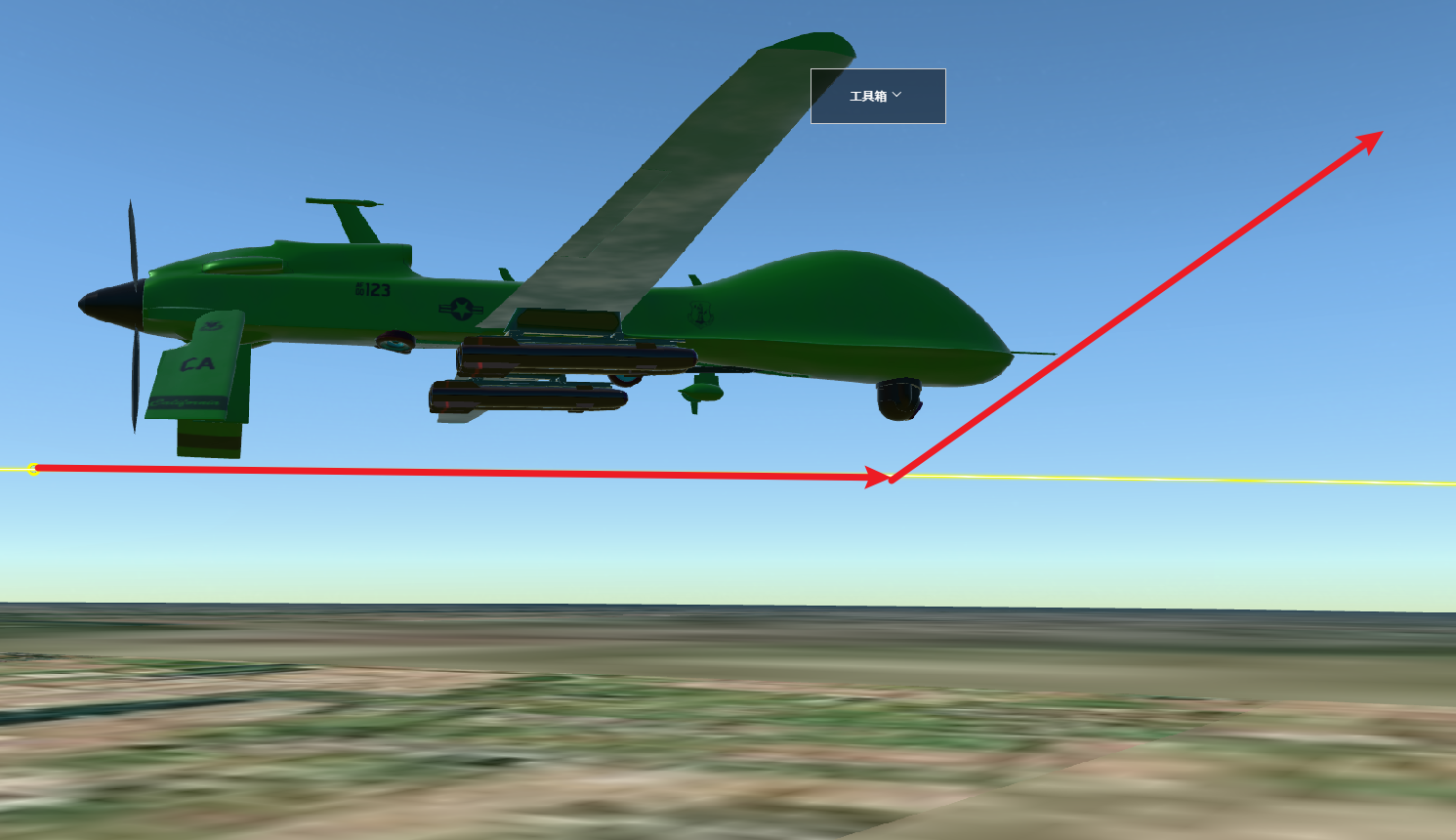
这里是会自己计算位置朝向

这是我定义的行进路线,如果是空间的路线不设置自动计算朝向的话,会机身水平但是整体斜向上飞。
entity的完整代码
export async function flyModel() {
const start = Cesium.JulianDate.fromDate(new Date())
const totalSeconds = 10
const stop = Cesium.JulianDate.addSeconds(
start,
totalSeconds,
new Cesium.JulianDate()
)
viewer.clock.startTime = start.clone() // 开始时间
viewer.clock.stopTime = stop.clone()
viewer.clock.currentTime = start.clone() //将当前时间设置为开始时间
viewer.clock.clockRange = Cesium.ClockRange.LOOP_STOP
viewer.clock.shouldAnimate = true // 开始动画 为false时,根据设定的时间
viewer.timeline.zoomTo(start, stop)
viewer.timeline.container.style.display = 'none'
const position = new Cesium.SampledPositionProperty() //差值集合
const startPosition = new Cesium.Cartesian3(
-2379556.799372864,
-4665528.205030263,
3628013.106599678
)
const endPosition = new Cesium.Cartesian3(
-2379603.7074103747,
-4665623.48990283,
3627860.82704567
)
const numberOfSamples = 100
for (let i = 0; i <= numberOfSamples; ++i) {
const factor = i / numberOfSamples
const time = Cesium.JulianDate.addSeconds(
start,
factor * totalSeconds,
new Cesium.JulianDate()
)
// time=0.1时
const locationFactor = Math.pow(factor, 2)
//0.0001
const location = Cesium.Cartesian3.lerp(
startPosition,
endPosition,
locationFactor,
new Cesium.Cartesian3()
) //计算差值,返回介于两个点之间的位置。
// Lerp(A,B,t)=A+t∗(B−A)
// 计算结果
//location = new Cesium.Cartesian3(
// -2379556.804063668, // x
// -4665528.21455875, // y
// 3628013.091371722 // z
// );
position.addSample(time, location) //添加样本
}
const vehicleEntity = await viewer.entities.add({
position: position,
orientation: new Cesium.VelocityOrientationProperty(position),
model: {
uri: '/knowledge/model/modelNew.gltf',
runAnimations: false, //是否开启模型的自带动画。
scale: 0.1,
maximumScale: 20,
},
})
console.log(vehicleEntity, 'vehicleEntity')
viewer.trackedEntity = vehicleEntity
vehicleEntity.viewFrom = new Cesium.Cartesian3(-10.0, 7.0, 4.0)
}
primitive,添加方式设置时间都是一样的只不过在加载的时候设置不一样
const model = await Cesium.Model.fromGltfAsync({
url: '/knowledge/model/modelNew.gltf',
scale: 0.1,
})
viewer.scene.primitives.add(model)
关键设置
viewer.scene.preRender.addEventListener(function (scene, time) {
debugger
// 获取当前位置和方向
const currentPosition = position.getValue(time)
// 获取四元数
const quat = orientation.getValue(time) // 获取四元数(wxyz)
// 直接使用四元数创建模型矩阵
const modelMatrix = Cesium.Matrix4.fromTranslationQuaternionRotationScale(
currentPosition,
quat,
new Cesium.Cartesian3(1.0, 1.0, 1.0)
)
// 更新模型的矩阵
model.modelMatrix = modelMatrix
})
补充; const orientation = new Cesium.VelocityOrientationProperty(position)这里和上面一样也创建一个方向样本,也是防止飞机屁股当头飞
完整代码
export async function flyModel() {
const start = Cesium.JulianDate.fromDate(new Date())
const totalSeconds = 10
const stop = Cesium.JulianDate.addSeconds(
start,
totalSeconds,
new Cesium.JulianDate()
)
viewer.clock.startTime = start.clone() // 开始时间
viewer.clock.stopTime = stop.clone()
viewer.clock.currentTime = start.clone() //将当前时间设置为开始时间
viewer.clock.clockRange = Cesium.ClockRange.LOOP_STOP
viewer.clock.shouldAnimate = true // 开始动画 为false时,根据设定的时间
viewer.timeline.zoomTo(start, stop)
viewer.timeline.container.style.display = 'none'
const position = new Cesium.SampledPositionProperty() //差值集合
const startPosition = new Cesium.Cartesian3(
-2379556.799372864,
-4665528.205030263,
3628013.106599678
)
const endPosition = new Cesium.Cartesian3(
-2379603.7074103747,
-4665623.48990283,
3627860.82704567
)
const numberOfSamples = 100
for (let i = 0; i <= numberOfSamples; ++i) {
const factor = i / numberOfSamples
const time = Cesium.JulianDate.addSeconds(
start,
factor * totalSeconds,
new Cesium.JulianDate()
)
const locationFactor = Math.pow(factor, 2)
const location = Cesium.Cartesian3.lerp(
startPosition,
endPosition,
locationFactor,
new Cesium.Cartesian3()
)
position.addSample(time, location) //添加样本
}
// 创建方向样本
const orientation = new Cesium.VelocityOrientationProperty(position)
const model = await Cesium.Model.fromGltfAsync({
url: '/knowledge/model/modelNew.gltf',
scale: 0.1, // 可选:缩放模型
})
viewer.scene.primitives.add(model)
viewer.camera.setView({
destination: new Cesium.Cartesian3(
-2379556.799372864,
-4665528.205030263,
3628013.106599678
),
})
viewer.scene.preRender.addEventListener(function (scene, time) {
debugger
// 获取当前位置和方向
const currentPosition = position.getValue(time)
// 获取四元数
const quat = orientation.getValue(time) // 获取四元数(wxyz)
// 直接使用四元数创建模型矩阵
const modelMatrix = Cesium.Matrix4.fromTranslationQuaternionRotationScale(
currentPosition,
quat,
new Cesium.Cartesian3(1.0, 1.0, 1.0) // 缩放因子
)
// 更新模型的矩阵
model.modelMatrix = modelMatrix
})
}
补充下模型获取节点getNode()entity加载方式获取不到,有大神能获取可以在评论补充说明
gltfModel.readyEvent.addEventListener(() => {
// 获取关键节点
node1 = gltfModel.getNode('Bomb01_MQ1CDroneMissilesGlassShader_0') // 导弹舱门控制节点
node = gltfModel.getNode('Bomb02') // 导弹发射控制节点
node2 = gltfModel.getNode('Undercarriage_MQ1CDroneShader_0') // 起落架控制节点
node3 = gltfModel.getNode('Propeller_MQ1CDroneShader_0') // 螺旋桨控制节点
})


















 638
638

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









