



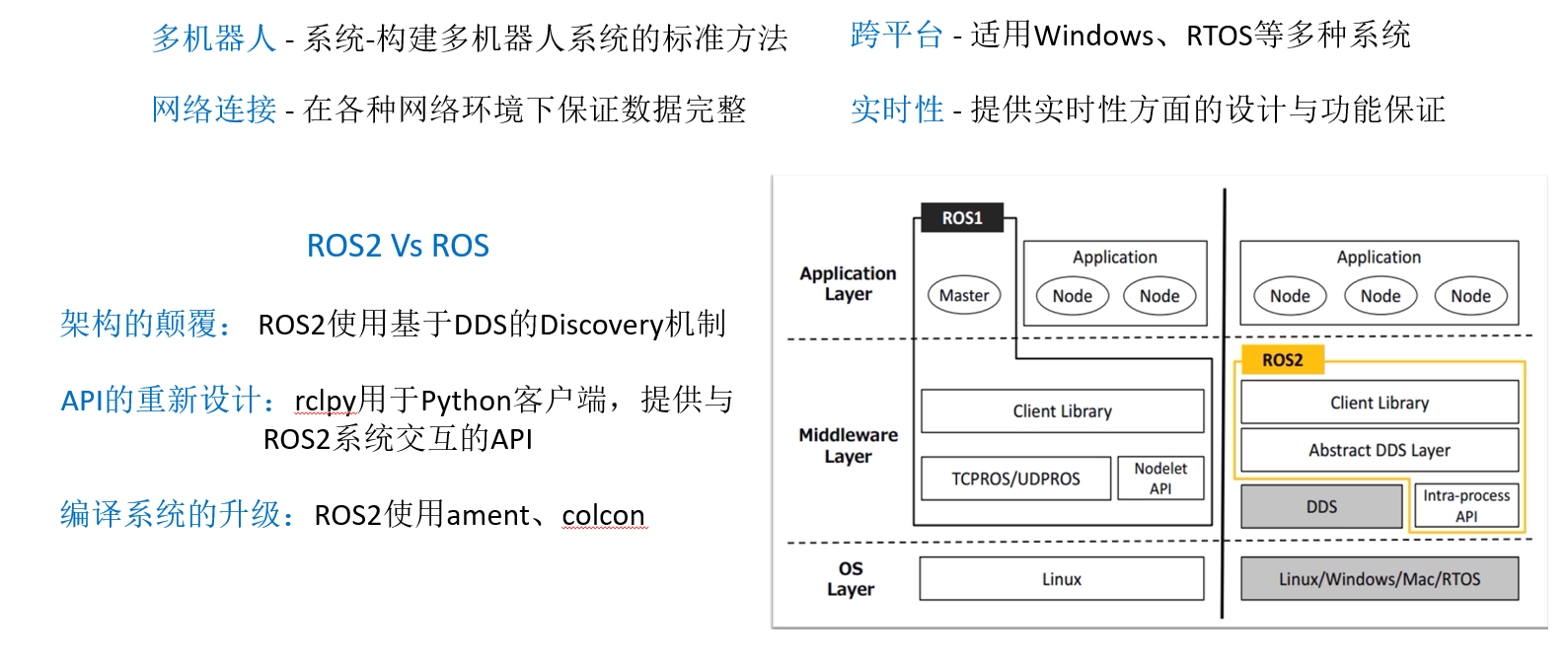
一、概述
二、安装
一键安装命令:wget http://fishros.com/install -O fishros && . fishros
版本:Unbuntu 22.04 :ros-humble
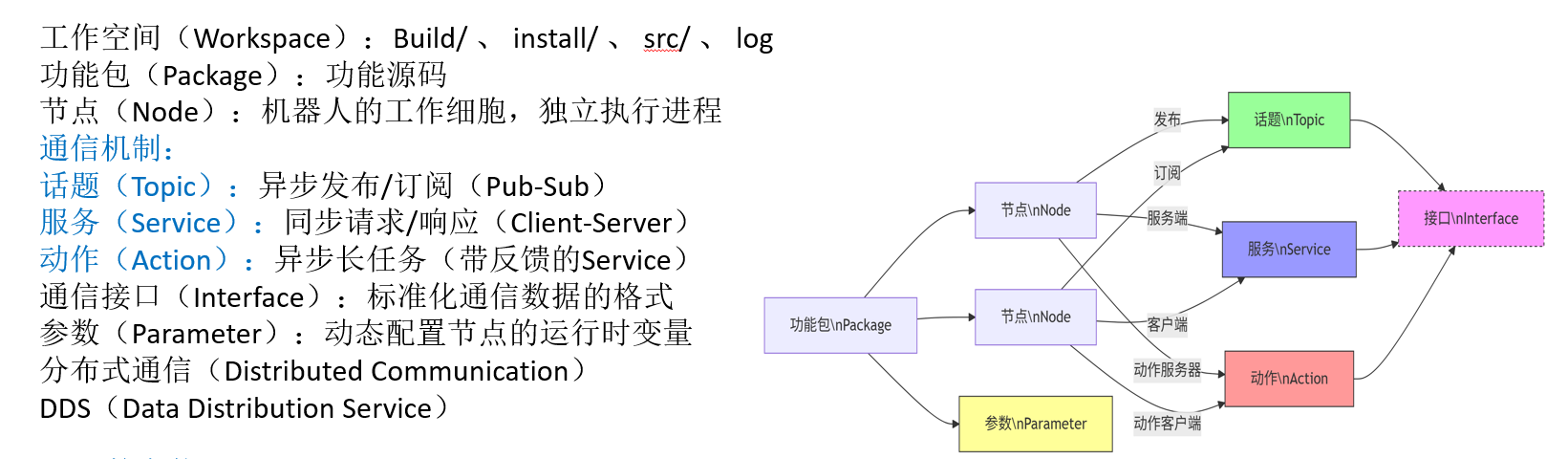
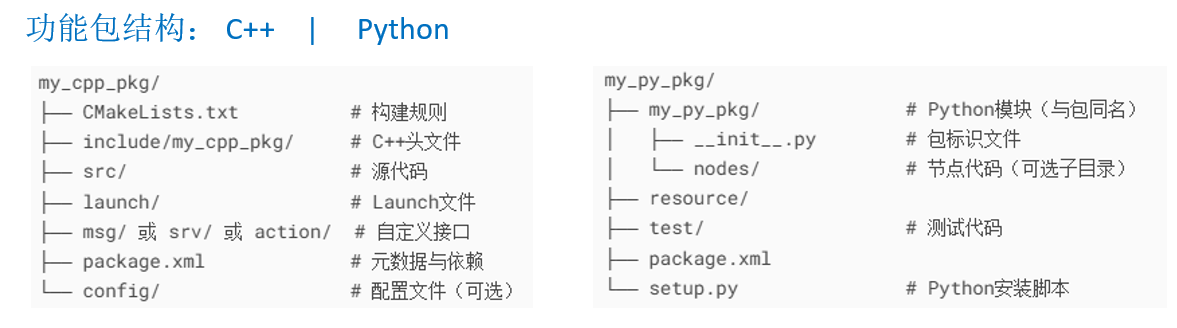
三、功能包
创建功能包: C++/Python
ros2 pkg create name_of_pack --build-type ament_cmake --dependencies rclcpp #C++功能包
ros2 pkg create my_py_pkg --build-type ament_python --dependencies rclpy #Python功能包创建
功能包编译:
colcon build --packages-select my_pkg # 编译单个包
colcon build # 编译所有包
source install/setup.bash #加载环境
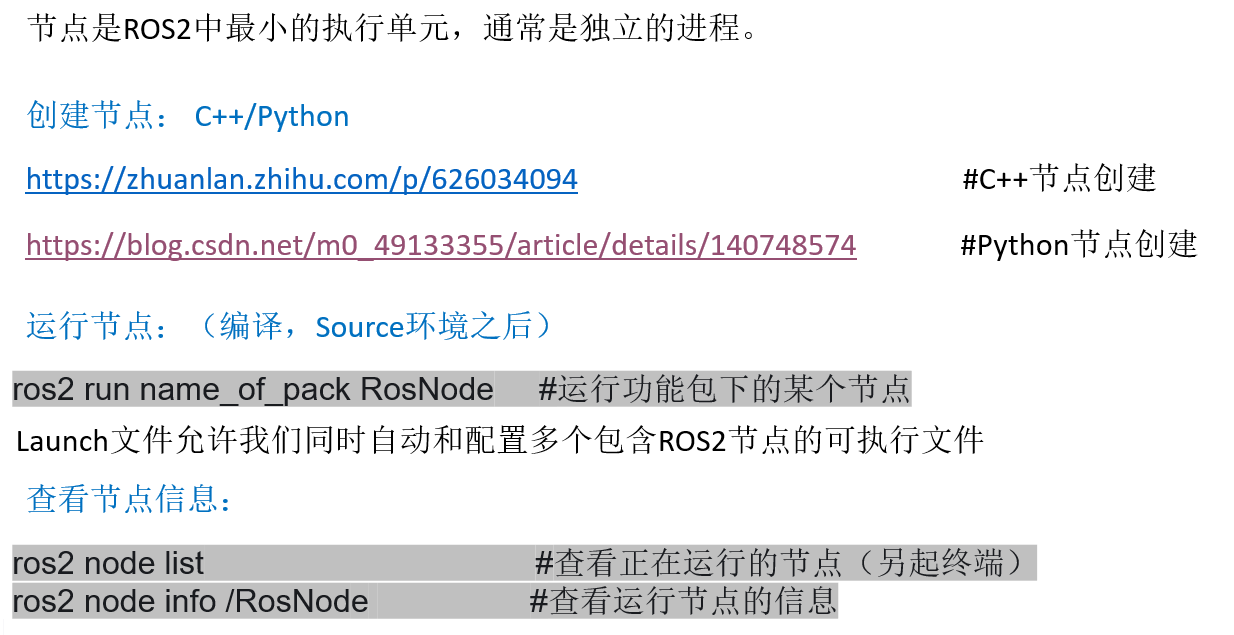
四、节点
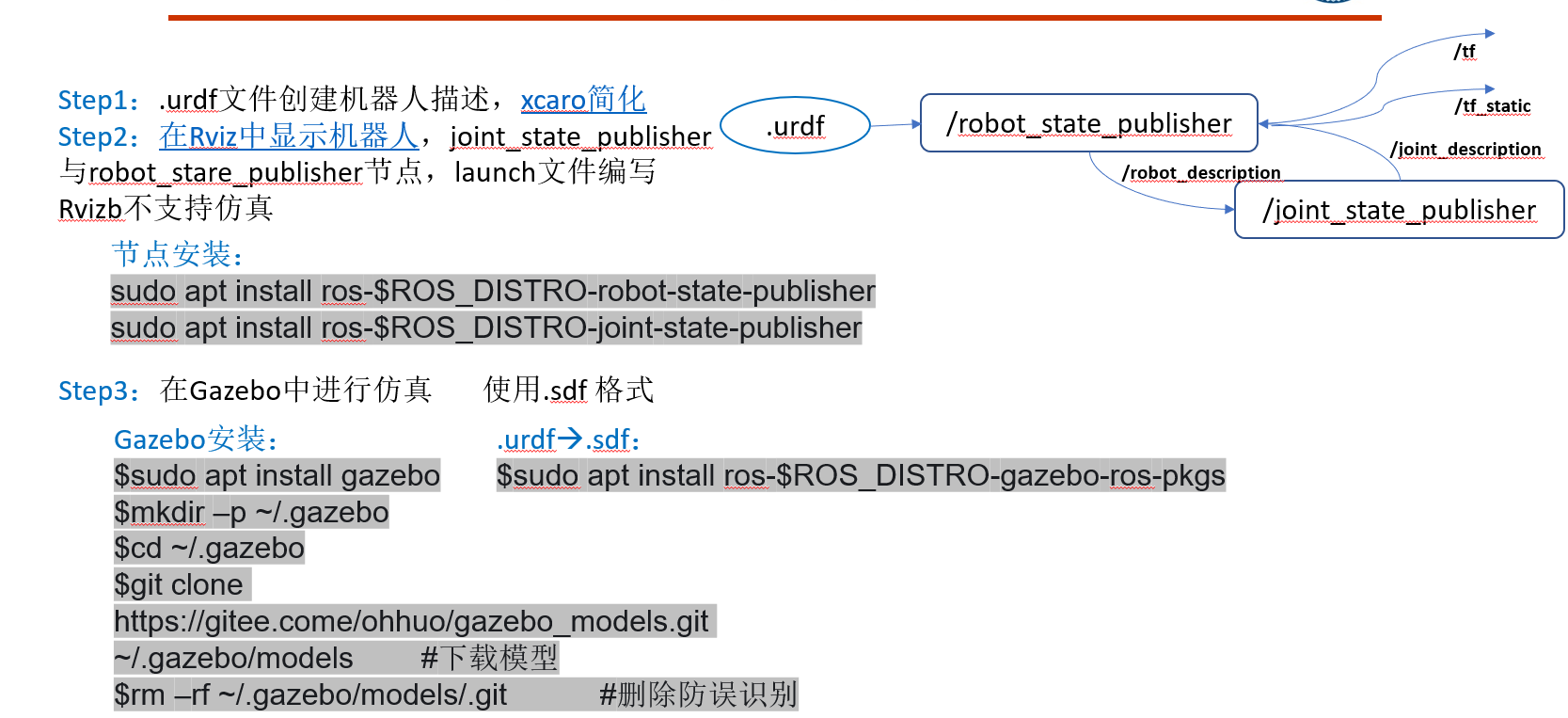
五、机器人仿真

















 1664
1664

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









