




嗨,大家好,我是心海,这是我的算法篇,第四篇文章!
目录
一、算法介绍
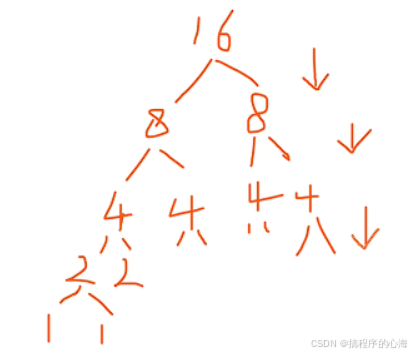
快速排序算法的核心思想是“分而治之”,它通过不断地将待排序序列划分成较小的子序列,然后分别对这些子序列进行排序,最终将整个序列有序化。它是由 C.A.R.Hoare 在 1962 年提出的,以其高效性而闻名,尤其在处理大规模数据时表现优异,是很多实际应用场景中的首选排序算法。
二、算法原理与实现
快速排序相对于前面基础排序算法(冒泡排序、插入排序、选择排序)会稍微复杂一点点
可以分为三个步骤
-
选基准 :挑一个元素作为基准值(pivot),一般是第一个元素,也可以最后一个元素、中间的元素或者随机选一个。
-
分区 :把序列中小于基准值的元素放在基准值左边,大于基准值的元素放在右边,这一步骤完成后,基准值就处于它在有序序列中的最终正确位置。
-
递归排序 :对基准值左边和右边的子序列分别重复上述步骤,直到子序列长度为 1(也就是整个序列已经有序)。
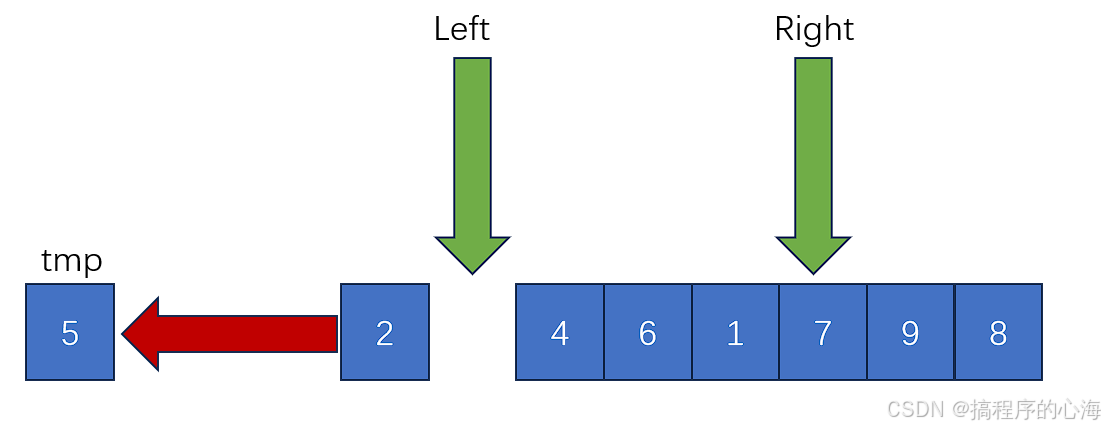
在实际操作过程中,我们会定义两个“指针”变量,首先用一个变量 tmp 取出我们的基准值,然后用left 和 right 两个变量分别指向数组两端,如下图
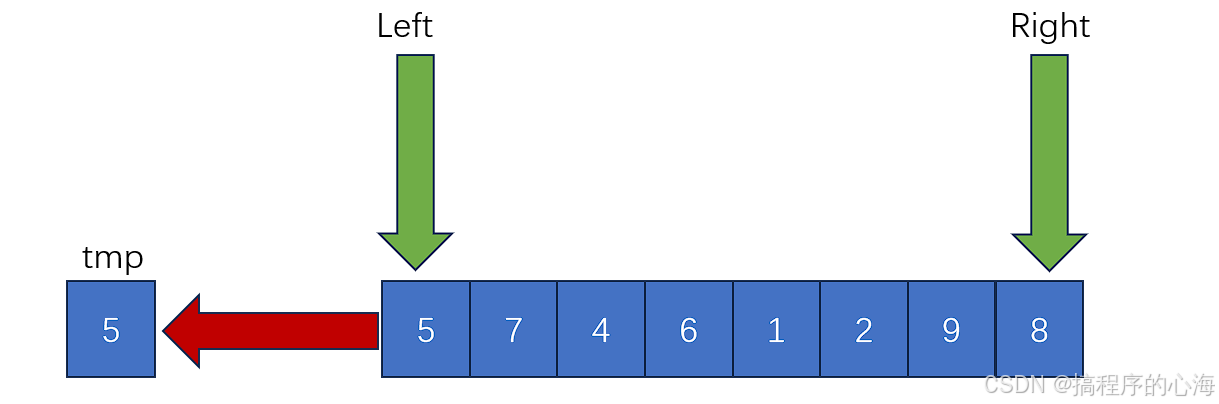
为了方便理解,我们可以把基准值的位置想象成空位
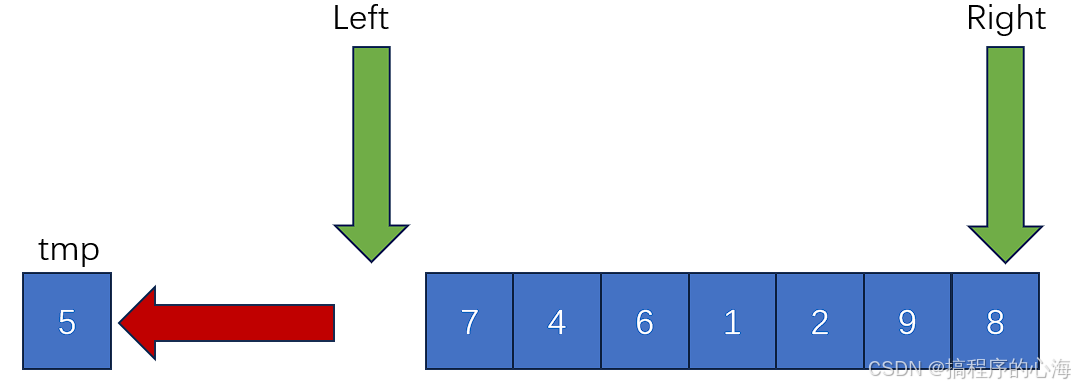
然后,接下来就很简单了,我们就是不断地移动元素去补充空位,同时把 left 和 right 分别向中间移动,直到二者重合
那么,怎么选择补充空位的值呢?
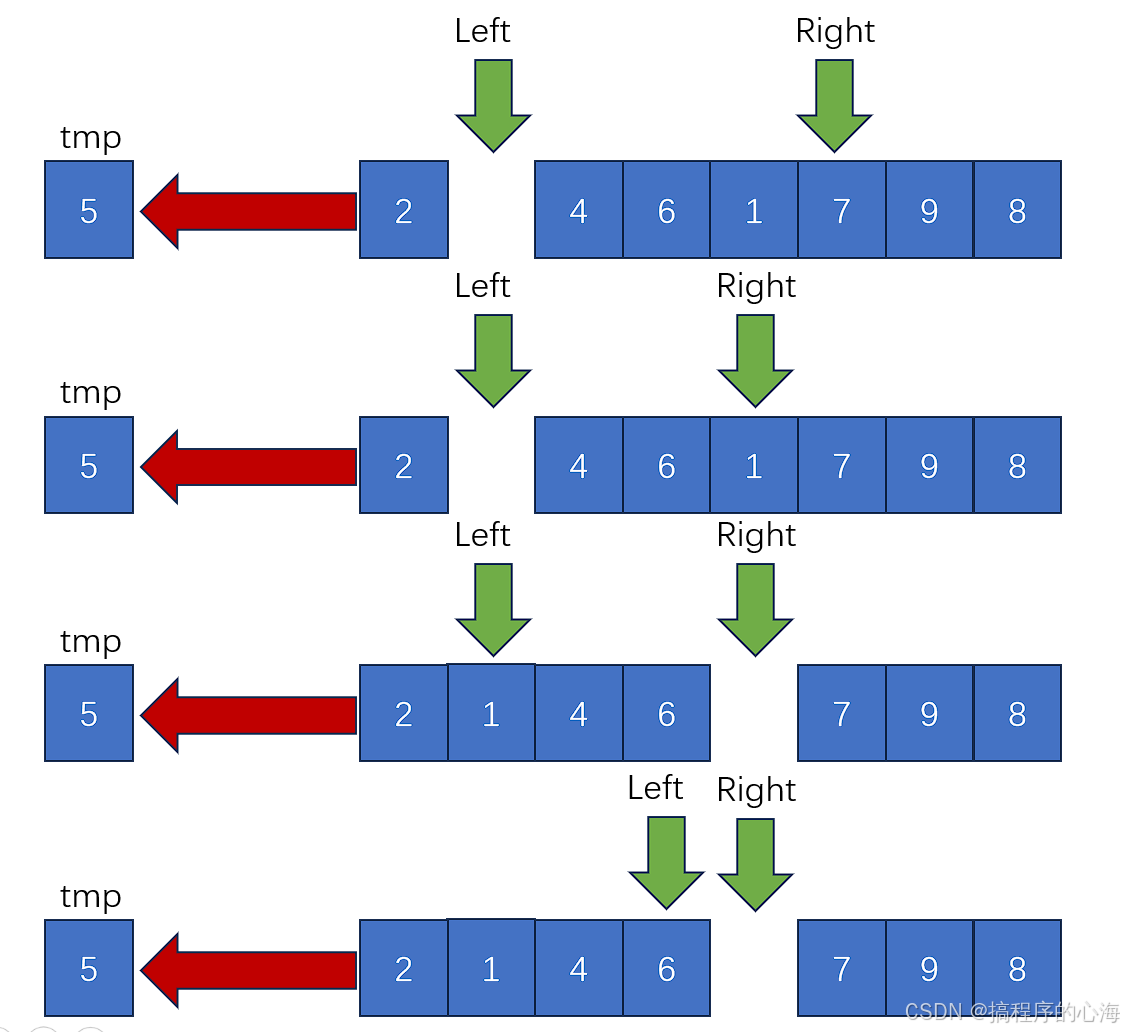
首先,此时 left 指向空,那么我们就看另一个指针变量 right ,看看其指向的数字是放在 tmp 右边还是左边,如果 right 指向的值大于 tmp ,则不用移动该值,而是将 right 这个指针向左移动一位,直到这个值比 tmp 小
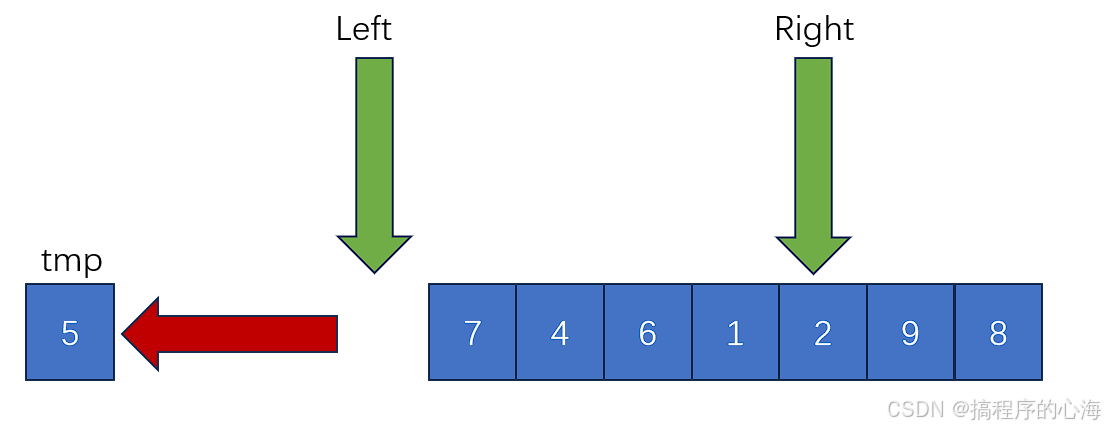
那么,我们就把 right 指向的值,移动到此时的空位,也就是 left 指向的位置
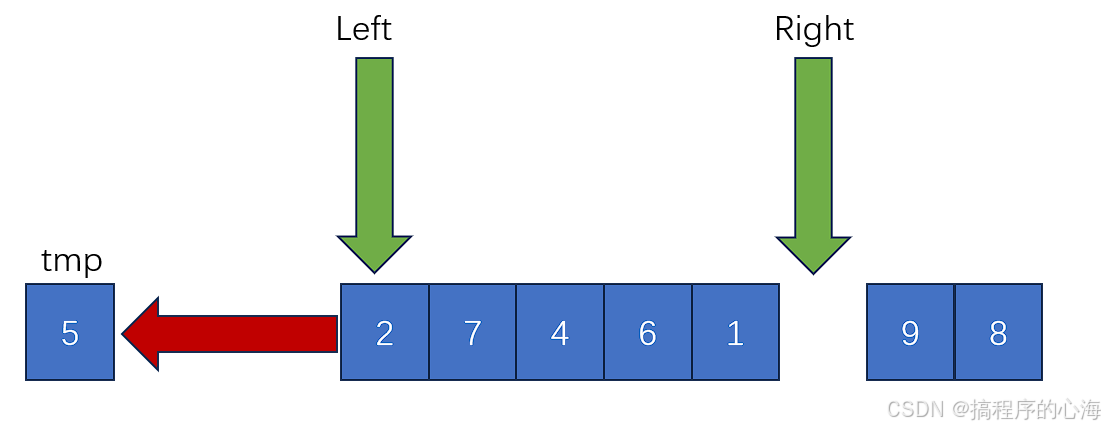
那么此时,right 指向空值了,那我们就移动 left ,而 left 碰到如果比 tmp 小,则执行交换
以此类推,直到最后,left 和 right 最后重合,
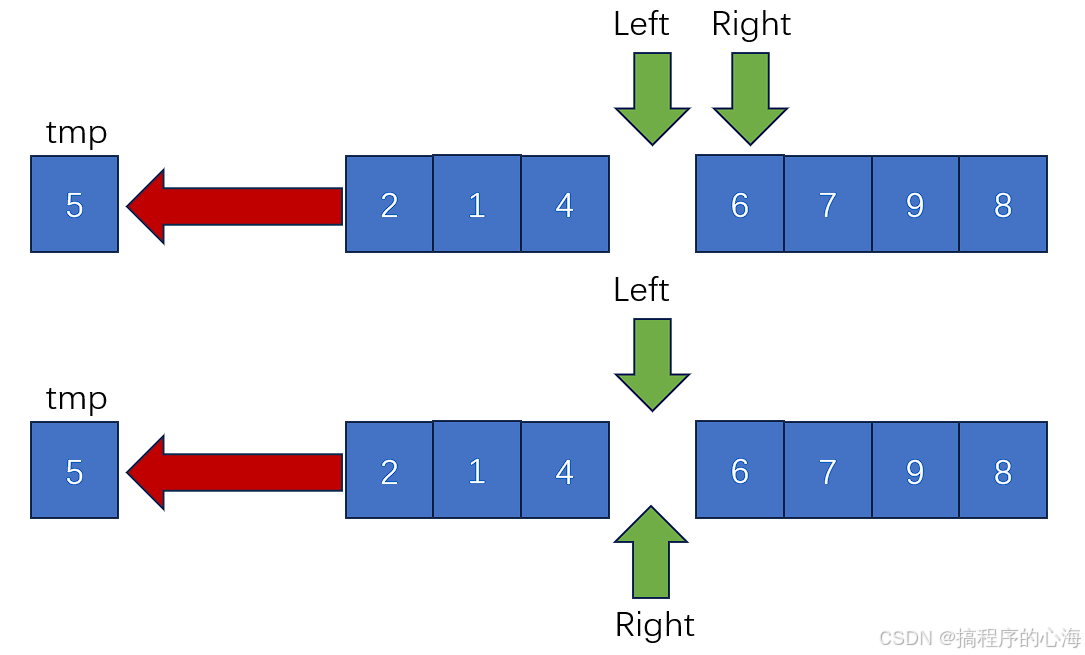
最后,剩下的这个空位,就是留给我们 tmp 的
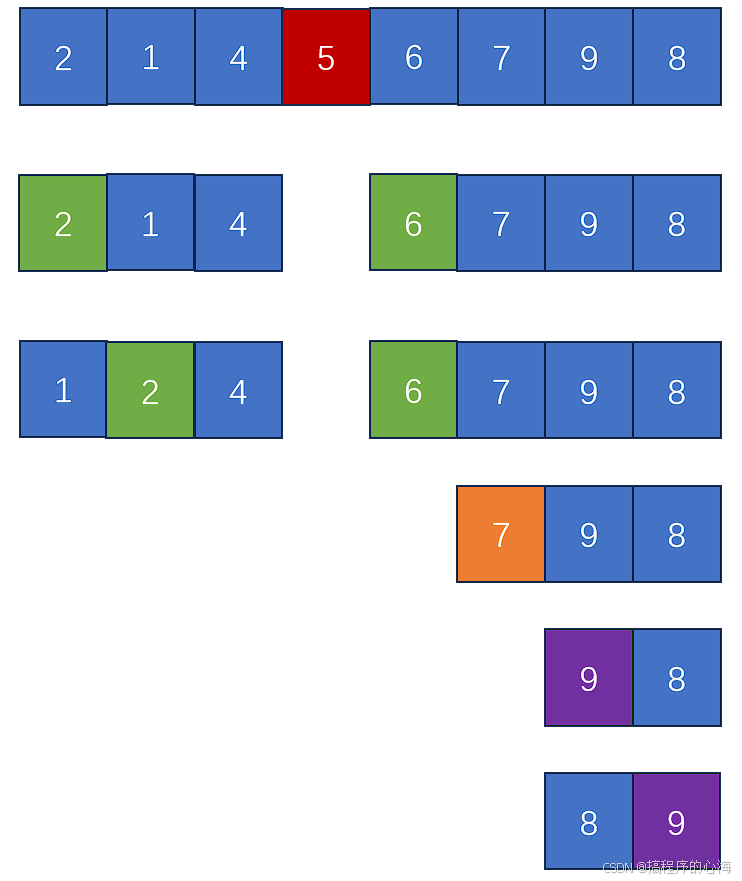
这个基准值,会把数组分为左右两部分,接下来,就是在左右的小区域不断重复递归,直到最后完成整个排序
来看代码,假设我们已经有一个函数帮我们完成前面讲解的一轮排序,那么我们就只需要递归调用
def quick_sort(li,left,right):#li是待排序数组
if left<right:
#至少有两个元素
mid=partition(li,left,right)
quick_sort(li,left,mid-1)
quick_sort(li,mid+1,right)上面的代码,首先当数组至少有两个元素,我们才需要排序,然后假设 partition 函数会帮我们完成一轮分区,并且返回基准值下标,也就是前面示例 tmp 的下标,然后后面分别将 tmp 左右两边的子数组传递到快速排序,也就是递归,直到完成排序即可。
那么剩下的,我们就是要完成分区工作,也就是找到基准值插入的位置、以及左右分区的工作
def partition(li,left,right):
tmp=li[left]
while left<right:
while left<right and li[right]>=tmp:#从右边开始,若大于初始值则继续向前
right-=1
li[left]=li[right]#将右边的值补到左边空位
while left<right and li[left]<=tmp:#接着左边开始向后检查,若小于目标值则继续
left+=1
li[right]=li[left]#将左边值给右边
li[left]=tmp#最后重合,左边指针即空位
return left相信看完一开始的图文分析,对照这个代码应该是比较清晰了
这里解释一下,为什么两层while里面都有 left < right 这个条件?
外层的比较简单,就是意味着两个指针还没有相遇,分区未完成;
而内层如果没有这个条件,那么可能 right 会移动到索引越界,造成错误,
三、时空复杂度分析
时间复杂度
最优情况 :每次选择的基准值都能将序列均分成两部分,此时递归树的深度为 log₂n,每一层的比较操作总共需要 O(n) 时间(每一层本质一个partition只有一个循环),所以总时间复杂度为 O(nlog₂n),也可以简记为 O(nlogn) 。
这里补充一下,出现循环减半(问题规模折半)才会出现 O(logn) 这种时间复杂度
最坏情况 :每次选择的基准值都是序列中的最小或最大元素,导致每次划分都只能得到一个空子序列和一个长度为 n - 1 的子序列,此时递归树的深度为 n,总时间复杂度为 O(n²)。
平均情况 :时间复杂度为 O(nlogn)。因为快速排序在实际中对于各种类型的序列都能表现良好,且平均情况更接近最优情况。
空间复杂度
快速排序的空间主要消耗在递归调用的栈空间上。在最优情况下,递归栈的深度为 log₂n,所以空间复杂度为 O(log₂n)。在最坏情况下,递归栈的深度为 n,空间复杂度为 O(n)。
四、测试对比
为了更直观地看出快速排序的速度,我们可以简单做一下测试

随机生成一万个数字来测试一下
![]()
根据二者时间复杂度可以得出,当数据量大到一定规模时,快速排序会比冒泡排序快特别多
快速排序具有更优的时间复杂度(O(n log n)),使其在处理大规模数据时比冒泡排序(O(n²))更有效率
五、总结
快速排序算法凭借其优雅的思路和高效的性能,在排序算法领域占据着举足轻重的地位。
它的分治思想和分区操作让人拍案叫绝,通过不断地划分和递归排序,能快速地将无序序列转换为有序序列。
不过,它也有着潜在的不足,比如在最坏情况下可能会退化成 O(n²) 的时间复杂度,以及需要用到额外的栈空间和辅助存储空间。
但在大多数实际应用场景中,快速排序仍然是一个非常优秀的排序算法,广泛应用于各种需要对数据进行快速有序排列的场景。
如果这篇文章对您有所启发,希望您能点赞关注支持一下。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









