




6自由度机械臂运动学分析与轨迹优化
1. 实验目的
1. 掌握 6自由度机械臂 的正向运动学和逆向运动学分析方法。
2. 实现 笛卡尔空间轨迹 的生成与优化,包括五项插值法、三次插值法和匀速优化方法。
3. 通过 MATLAB Robotics Toolbox 验证运动学分析的正确性,并对求解结果进行优化和验证。
2. 实验原理
2.1 正向运动学
正向运动学通过机械臂的 DH 参数 和 关节变量 计算末端执行器的位姿矩阵。
2.2 逆向运动学
逆向运动学通过末端执行器的 位姿矩阵 求解机械臂的 关节变量。使用数值解法(如 `ikunc` 函数)求解。
2.3 轨迹优化
1. 五项插值法:使用五次多项式插值生成平滑轨迹。
2. 三次插值法:使用三次多项式插值生成轨迹。
3. 匀速优化方法:使用匀速插值生成轨迹。
3. 实验步骤
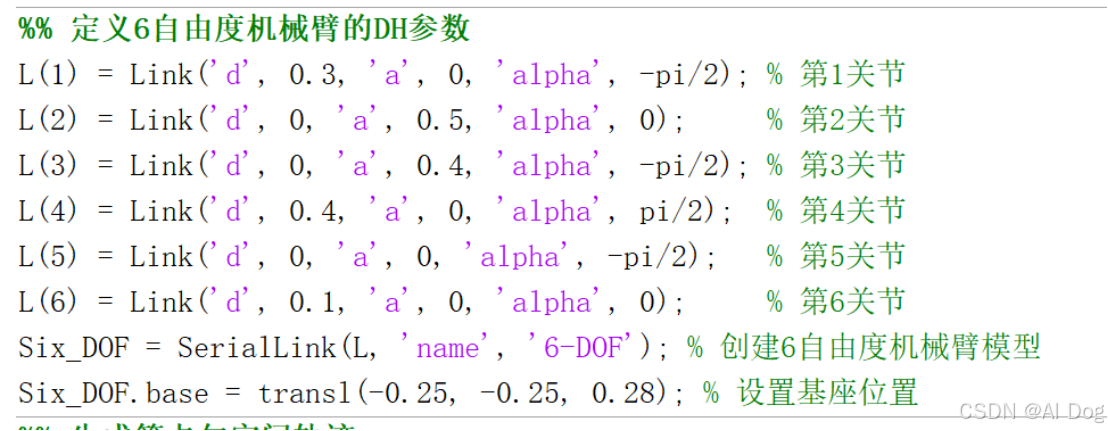
1. 定义机械臂模型:
使用改进的 DH 参数定义 6 自由度机械臂。
2. 生成笛卡尔空间轨迹:
定义起始点和目标点,生成笛卡尔空间轨迹。
3. 轨迹优化:
使用五项插值法、三次插值法和匀速优化方法优化轨迹。
4. 正向运动学验证:
计算给定关节变量的末端执行器位姿矩阵。
5. 逆向运动学验证:
从位姿矩阵求解关节变量,并重新计算位姿矩阵以验证解的准确性。
6. 轨迹分析与可视化:
绘制轨迹曲线、速度曲线和加速度曲线,分析轨迹的平滑性和动态性能。
- 实验结果
4.1 正向运动学验证
给定关节变量,计算末端执行器位姿矩阵:
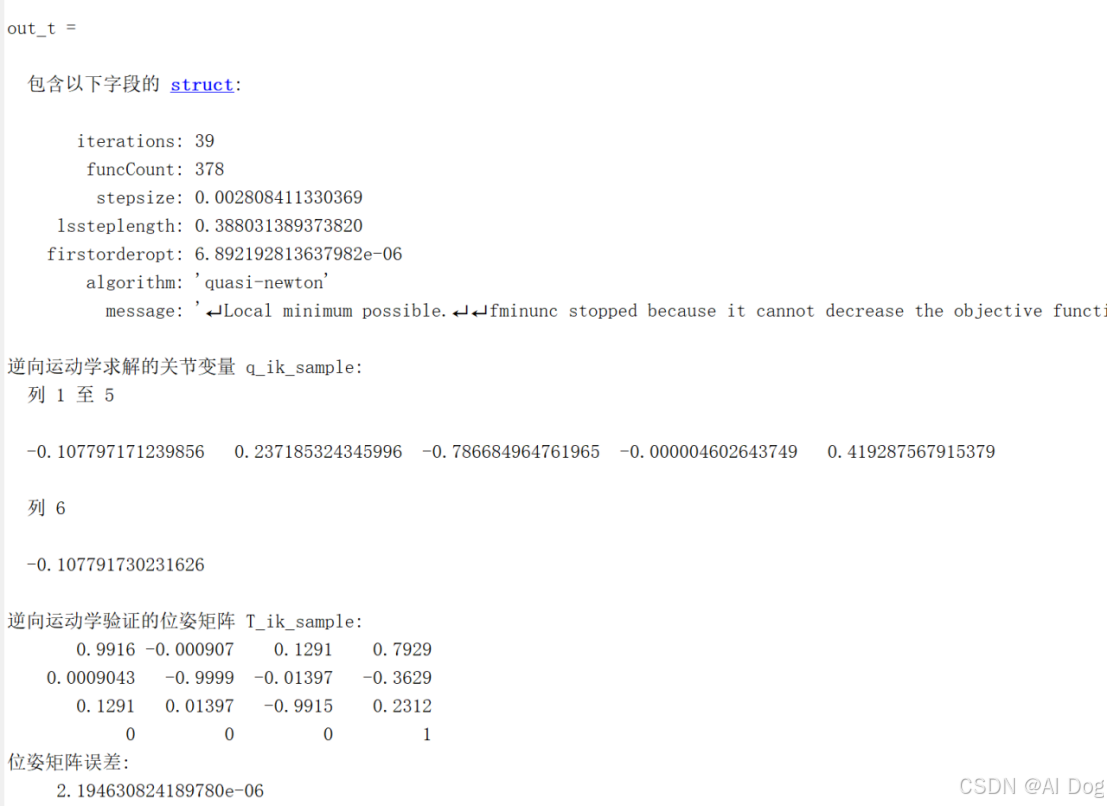
4.2 逆向运动学验证
从位姿矩阵求解关节变量:
4.3 轨迹优化结果
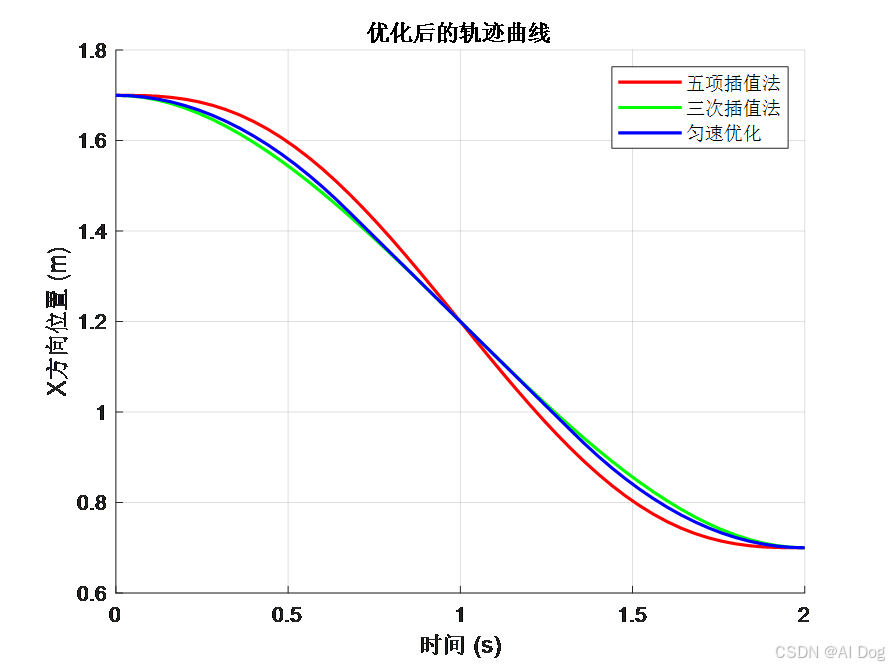
1. 轨迹曲线:
五项插值法、三次插值法和匀速优化方法的轨迹曲线平滑。
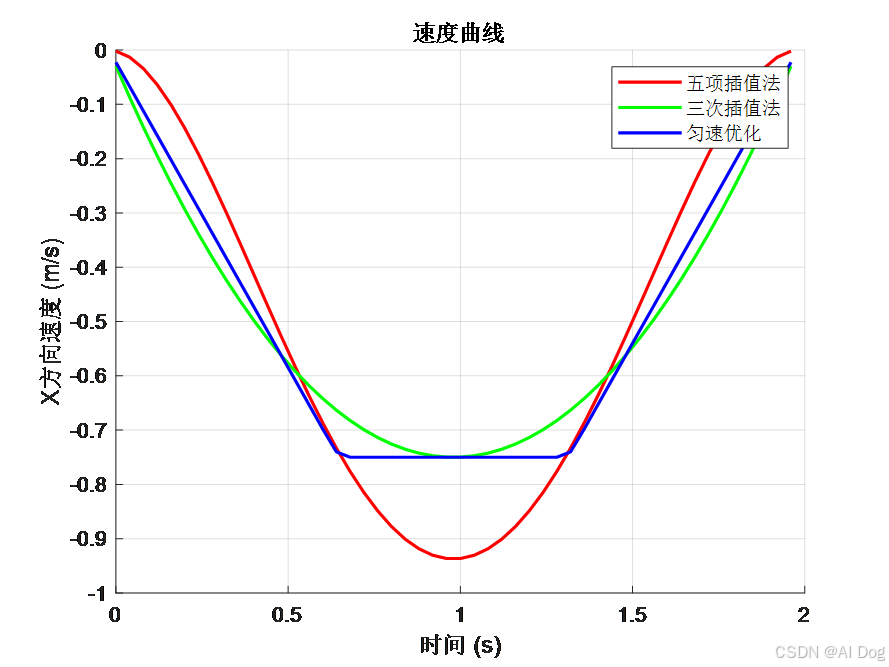
2. 速度曲线:
五项插值法的速度曲线连续,三次插值法的速度曲线存在突变,匀速优化方法的速度恒定。
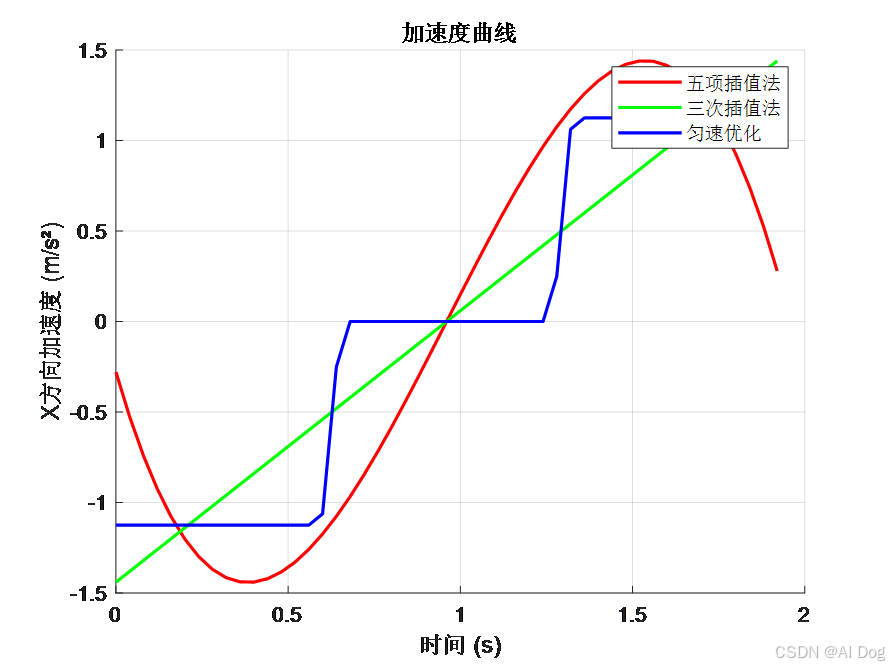
3. 加速度曲线:
五项插值法的加速度曲线连续,三次插值法的加速度曲线存在突变,匀速优化方法的加速度为零。
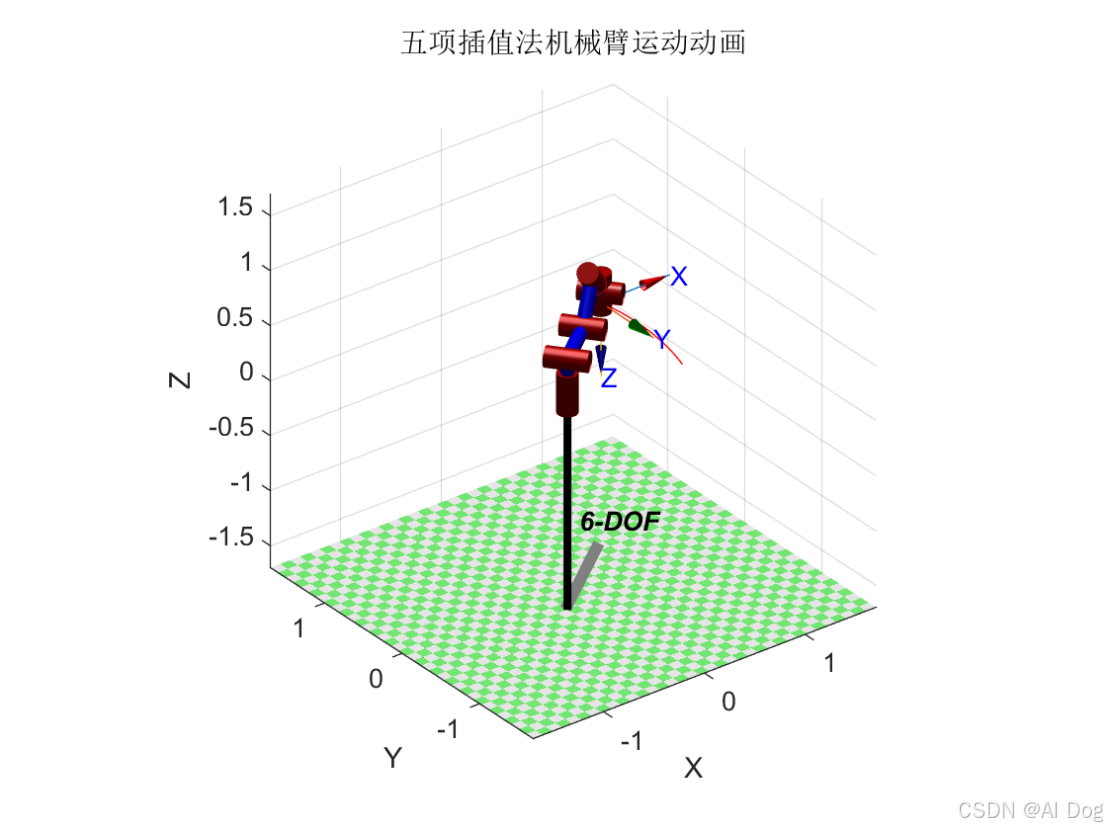
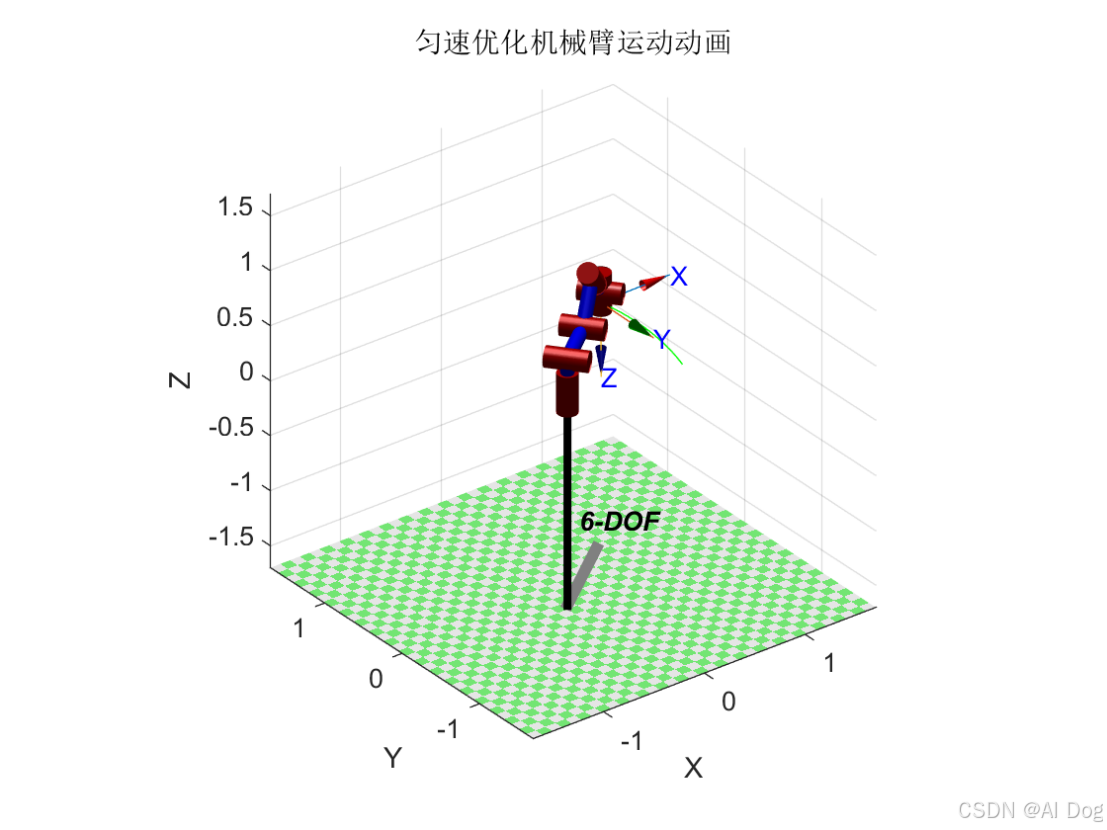
4.4 机械臂运动动画
1. 五项插值法:机械臂运动平滑,轨迹连续。
2. 三次插值法:机械臂运动存在轻微抖动。
3. 匀速优化方法:机械臂运动匀速,轨迹平滑。
5. 实验总结
1. 正向运动学:
通过 DH 参数和关节变量成功计算了末端执行器的位姿矩阵。
2. 逆向运动学:
使用数值解法求解关节变量,验证了解的正确性。
3. 轨迹优化:
五项插值法生成的轨迹平滑,适合高精度运动;三次插值法生成的轨迹存在突变,适合中等精度运动;匀速优化方法生成的轨迹匀速,适合匀速运动场景。
4. 误差分析:
逆向运动学求解的误差接近于零,表明解的准确性。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











