




状态机专题练习
一、状态机原理
(一)有限状态机
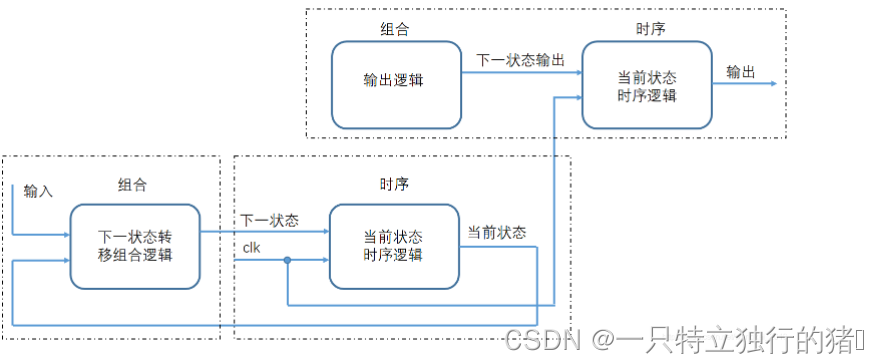
状态机由状态寄存器和组合逻辑电路构成,能够根据控制信号按照预先设定的状态进行状态转移,是协调相关信号动作、完成特定操作的控制中心。有限状态机简写为FSM(Finite State Machine),主要分为2大类:Moore状态机和Mealy状态机
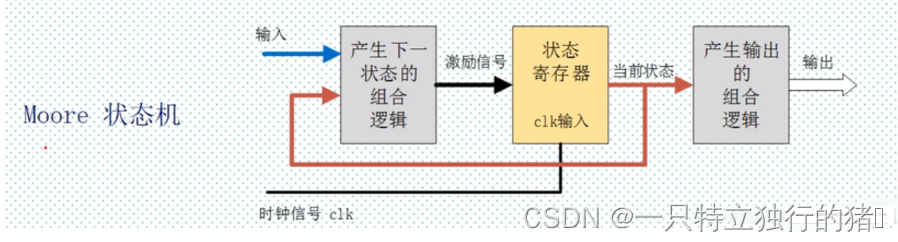
(二)Moore状态机
摩尔状态机:当输出(output)只与当前状态有关时,所描述的状态机称为Moore型状态机。
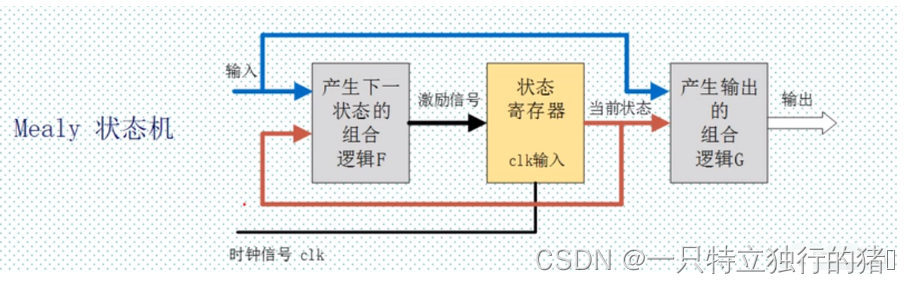
(三)Mealy状态机
米利状态机:当输出(output)不仅与当前状态有关而且与输入(inputs)有关时,所描述的状态机称为Mealy型状态机。
(四)状态机描述方法
1.一段式
只有一个always块,把所有的逻辑(输入、输出、状态)都在一个always块的时序逻辑中实现。这种写法看起来很简洁,但是不利于维护,如果状态复杂一些容易出错。
2.两段式
有两个always 块,把时序逻辑和组合逻辑分隔开来。时序逻辑里进行当前状态和下一状态的切换,组合逻辑实现各个输入、输出以及状态判断。这种写法不仅便于阅读、理解、维护,而且利于综合器优化代码,利于用户添加合适的时序约束条件,利于布局布线器实现设计。在两段式描述中,当前状态的输出用组合逻辑实现,可能存在竞争和冒险,产生毛刺。
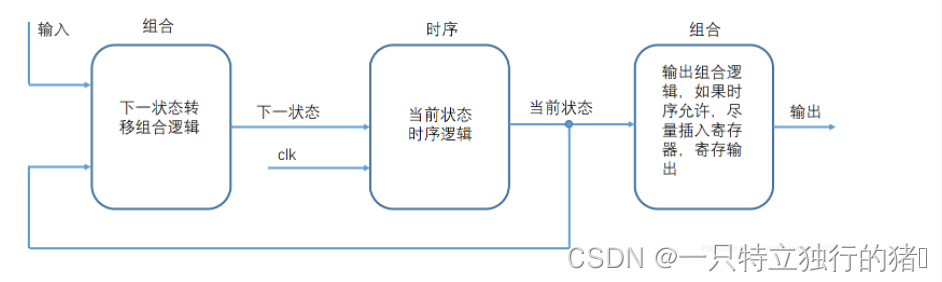
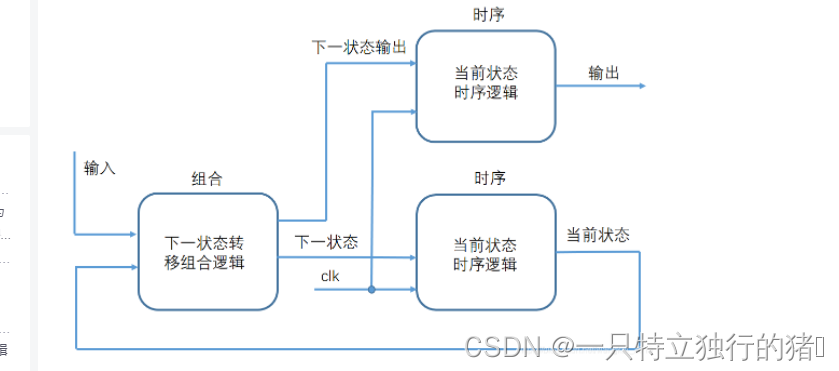
3.三段式
有三个always块,一个采用同步时序的方式描述状态转移,一个采用组合逻辑的方式判断状态转移条件、描述状态转移规律,第三个always使用同步时序的方式描述每个状态的输出。
代码容易维护,时序逻辑的输出解决了两段式组合逻辑的毛刺问题,但是从资源消耗的角度上看,三段式的资源消耗多一些。
(五)状态机标准评判标准
好的状态机的标准很多,最重要的几个方面如下:
第一,状态机要安全,是指FSM不会进入死循环,特别是不会进入非预知的状态,而且由于某些扰动进入非设计状态,也能很快的恢复到正常的状态循环中来。这里面有两层含义:其一要求该FSM的综合实现结果无毛刺等异常扰动;其二要求FSM要完备,即使受到异常扰动进入非设计状态,也能很快恢复到正常状态。
第二,状态机的设计要满足设计的面积和速度的要求。
第三,状态机的设计要清晰易懂、易维护。
二、状态机状态设计
(一)实验要求
根据以下描述功能用verilog编写一段代码,并用状态机来实现该功能。
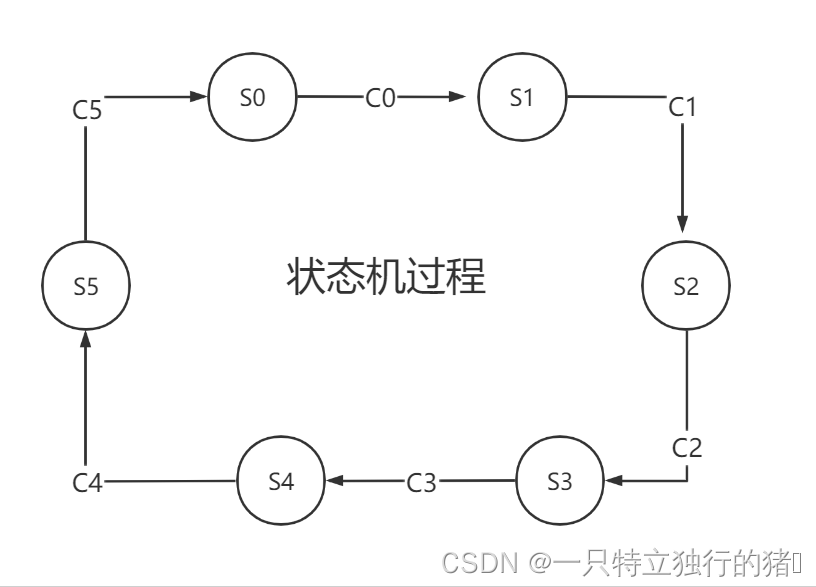
(1)状态机:实现一个测试过程,该过程包括启动准备状态、启动测试、停止测试、查询测试结果、显示测试结果、测试结束返回初始化6个状态;用时间来控制该过程,90秒内完成该过程;
(2)描述状态跳转时间;
(3)编码实现。
(二)设计思路
| 序号 | 状态 | 说明 |
|---|---|---|
| S0 | 初始化状态(initial) | 初始化 |
| S1 | 准备状态(ready) | 准备20秒钟 |
| S2 | 启动状态(start) | 经过18秒测试完成 |
| S3 | 停止状态(stop) | 经过25秒测试结束 |
| S4 | 查询状态(search) | 经过14秒测试结果查询 |
| S5 | 结果状态(display) | 显示8s测试结果 |
| 序号 | 时间 | 说明 |
|---|---|---|
| C0 | 5s | 到S1状态,led0亮 |
| C1 | 20s | 进入S2状态,led0,1亮 |
| C2 | 18s | 进入S3状态,led0,1,2 亮 |
| C3 | 25s | 进入S4状态,led0,1,2,3亮 |
| C4 | 14s | 进入S5结果显示状态 ,led0,1,2,3闪烁 |
| C5 | 8s | 返回S0初始化状态,led都灭 |
(三)实现
1.创建文件夹如下
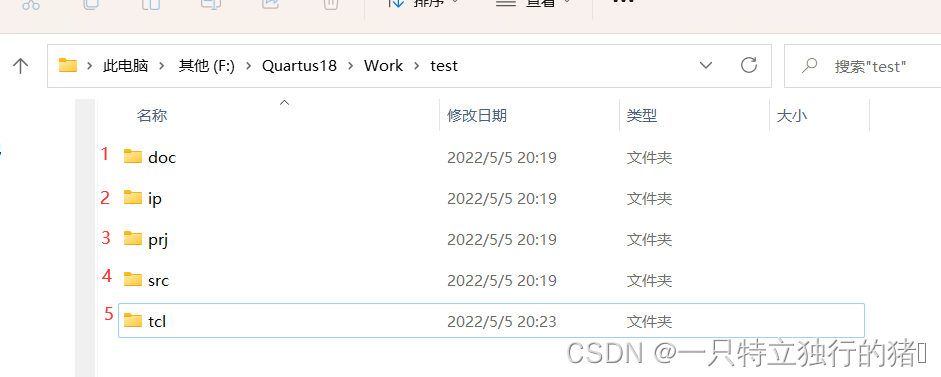
(1).doc用于放置设计说明、系统框图、设计思路等文件
(2).ip用于放置ip核文件
(3).prj/par用于工程创建的路径
(4).rtl/src用于存放源文件,也就是放自己写的Verilog程序
(5).sim/tb用于存放仿真文件
2.创建项目
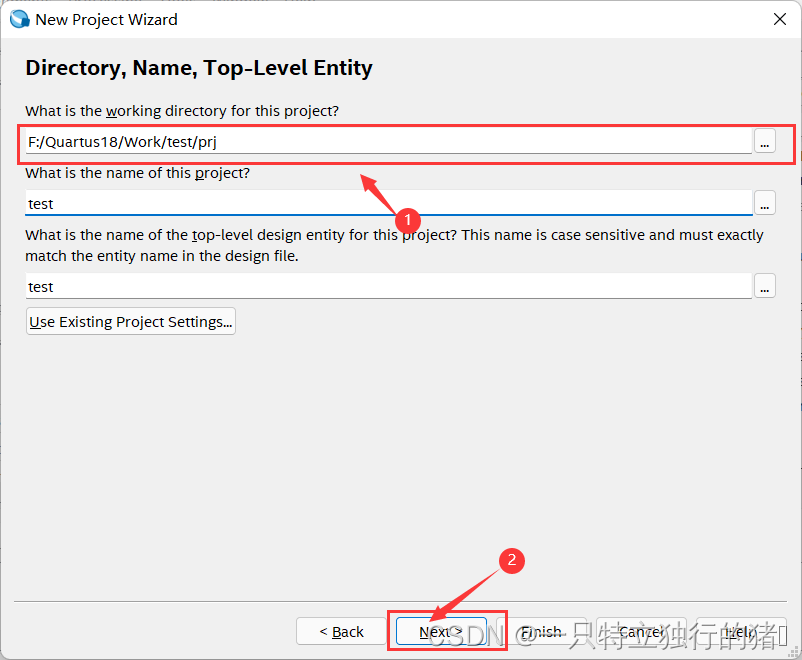
(1)打开Quartus Prime,选择File->New Project Wizard...创建项目
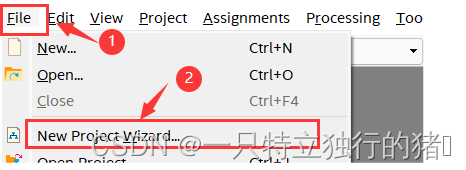
(2)在刚才的prj目录下创建项目
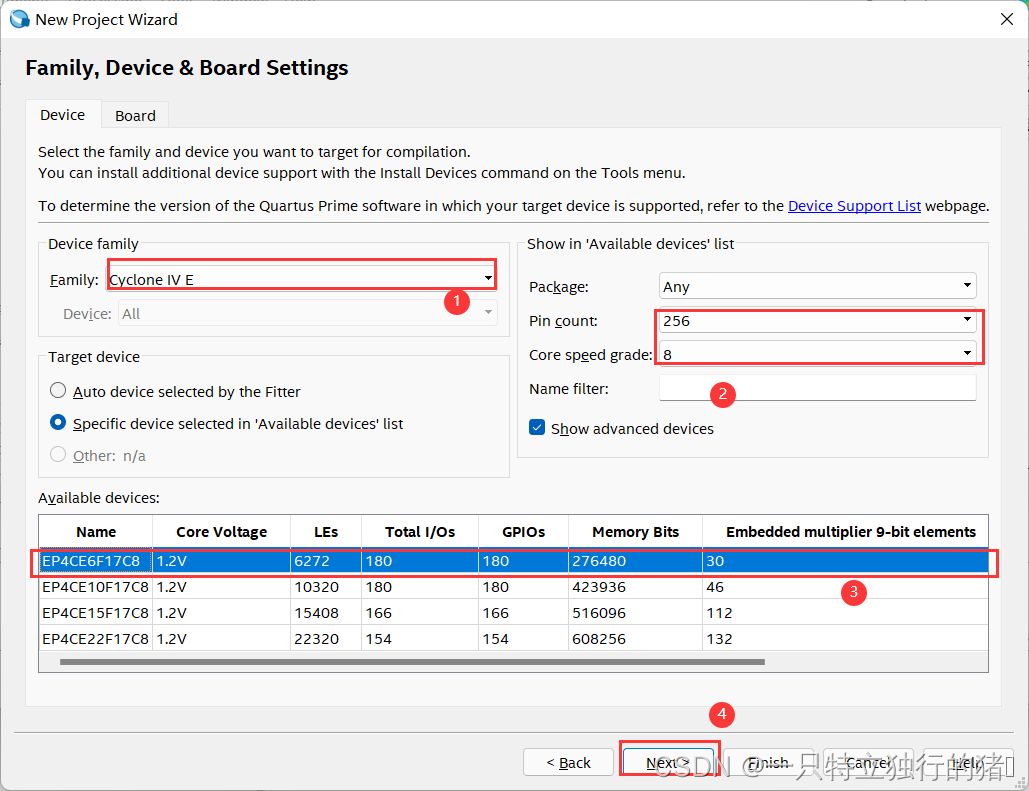
(3)选择Cyclone IV E系列的EPCE6F17C8
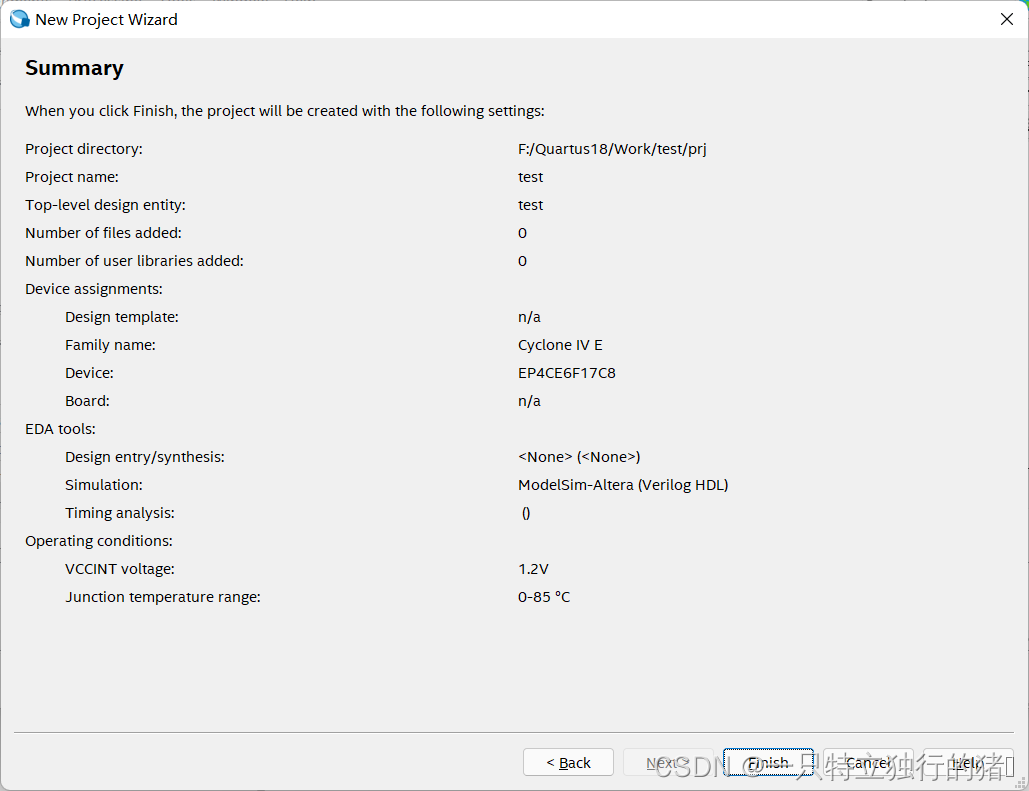
(4)完成
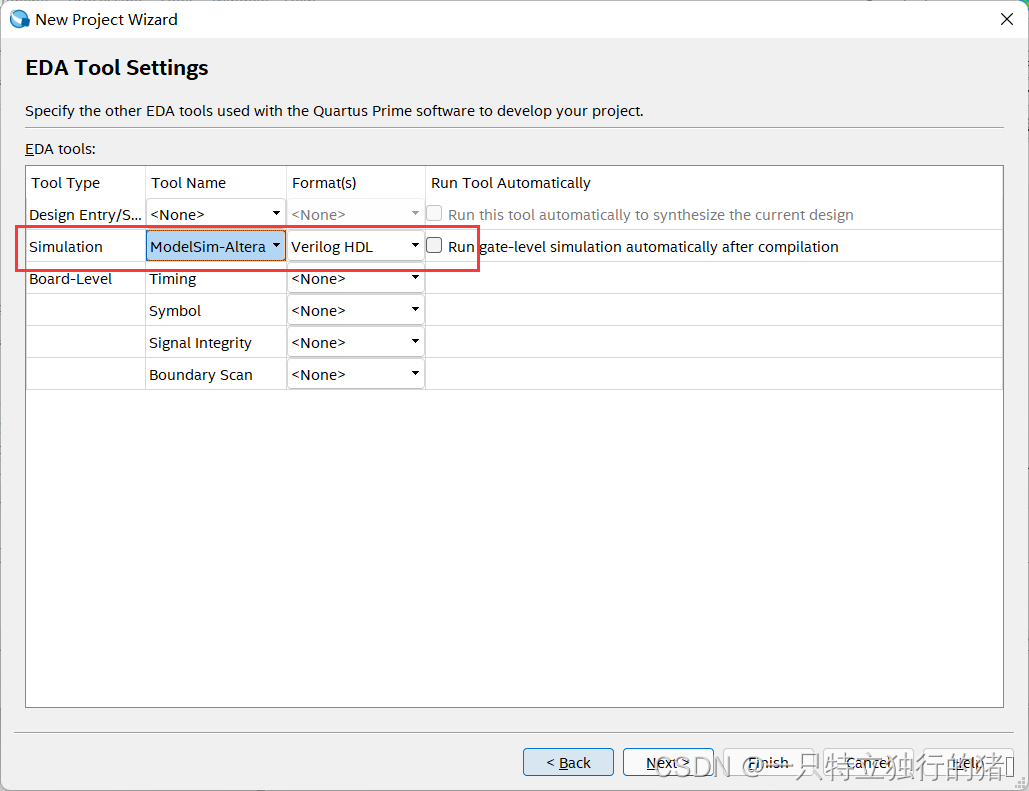
(5)详情如下
3.新建verilog文件,File->New->Verilog HDL File
4.代码设计模块
module test(
input wire clk,
input wire rst_n,
output wire [3:0] led
);
parameter MAX_NUM = 26'd49_999_999;//记最大数,时间1s
parameter C0 = 5'd5;//5s
parameter C1 = 5'd20;//20s
parameter C2 = 5'd18;//18s
parameter C3 = 5'd25;//25s
parameter C4 = 5'd14;//14s
parameter C5 = 5'd8;//8s
//状态空间
parameter S0 = 3'd0;//初始状态
parameter S1 = 3'd1;//准备状态
parameter S2 = 3'd2;//启动状态
parameter S3 = 3'd3;//停止状态
parameter S4 = 3'd4;//查询状态
parameter S5 = 3'd5;//结果状态
reg [4:0] number;//每个模块计数
reg [25:0] cnt;//计数寄存器
reg [4:0] state_time;//每个状态记录时
reg [2:0] flag;//状态标志
reg [2:0] cstate;//现态
reg [3:0] led_r;
//1秒钟计数器
always@(posedge clk or negedge rst_n)begin
if(!rst_n) begin //按下复位键
cnt<=26'd0; //计数器清零
end
else if(cnt == MAX_NUM)begin
cnt <= 26'd0;
end
else begin
cnt <= cnt + 1'd1;
end
end
//各模块计数器
always@(posedge clk or negedge rst_n)begin
if(!rst_n) begin //按下复位键
state_time <= 1'd0;
end
else if(cnt == MAX_NUM)begin
state_time <= state_time + 1'd1;
end
else if(state_time == number)begin
state_time <= 1'd0;
end
else begin
state_time <= state_time;
end
end
//状态切换
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cstate <= S0;
number <= C0;
flag <= 1'd0;
end
else begin
case(cstate)
S0:begin
if(state_time == 3'd5&&(!flag))begin
cstate <= S1;
number <= C1;
flag <= flag + 1'd1;
end
else begin
cstate <= S0;
end
end
S1:begin
if(state_time == 5'd20&&(flag == 1))begin
cstate <= S2;
number <= C2;
flag <= flag + 1'd1;
end
else begin
cstate <= S1;
end
end
S2:begin
if(state_time == 5'd18&&(flag == 2))begin
cstate <=S3;
number <= C3;
flag <= flag + 1'd1;
end
else begin
cstate <= S2;
end
end
S3:begin
if(state_time == 5'd25&&(flag == 3))begin
cstate <=S4;
number <= C4;
flag <= flag + 1'd1;
end
else begin
cstate <= S3;
end
end
S4:begin
if(state_time == 5'd14&&(flag == 4))begin
cstate <=S5;
number <= C5;
flag <= flag + 1'd1;
end
else begin
cstate <= S4;
end
end
S5:begin
if(state_time == 5'd8 &&(flag == 5))begin
cstate <=S0;
number <= C0;
flag <= 1'd0;
end
else begin
cstate <= S5;
end
end
default:begin
cstate <=S0;
number <= C0;
flag <= 1'd0;
end
endcase
end
end
//led灯状态
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
led_r <= 4'b0000;
end
else begin
case(cstate)
S0: led_r <= 4'b0001;
S1: led_r <= 4'b0011;
S2: led_r <= 4'b0111;
S3: led_r <= 4'b1111;
S4: begin
if(cnt == MAX_NUM)begin
led_r <= ~led_r;
end
else begin
led_r <= led_r ;
end
end
S5: led_r <=4'b0000;
default:led_r <= 4'b0000;
endcase
end
end
assign led = led_r;
endmodule
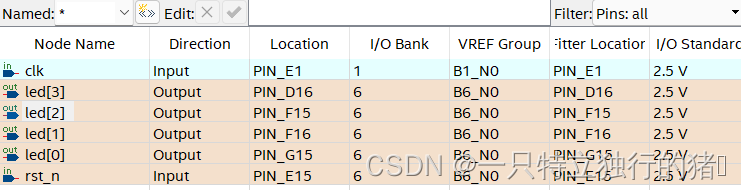
5.引脚绑定
6.实验结果
由于实验的时间太长,为方便演示,本次实验用缩短的时间显示分别表示几个状态,
三、检测10010串的状态
(一)实验要求
画出可以检测10010串的状态图, 并用verilog编程实现之。
(二)设计思路

| 状态 | 识别 | 效果 |
|---|---|---|
| S0 | - | 初始状态,不亮灯 |
| S1 | 1 | led0亮,否则退回初始状态 |
| S2 | 10 | led0,led1亮;否则退回S1上一状态 |
| S3 | 100 | led0,led1,led2亮;否则退回S2上一状态 |
| S4 | 1001 | led0.led1,led2,led3亮;否则退回S3上一状态 |
| S5 | 10010 | 四个灯闪烁两秒后熄灭;否则退回S4上一状态 |
用按键KEY表示0,KEY2表示1,作为输入
(三)实现
相同的创建项目和文件夹同上**三、(三)1.2**
1.代码实现部分
(1)状态处理模块deal.v
//状态识别:10010
module deal(
input wire clk,
input wire rst_n,
input wire [1:0] key,
output wire [3:0] led
);
parameter MAX_NUM =26'd49_999_999;
parameter CNT_02 =24'd9_999_999;
//状态空间
parameter S0 = 3'd0;
parameter S1 = 3'd1;
parameter S2 = 3'd2;
parameter S3 = 3'd3;
parameter S4 = 3'd4;
parameter S5 = 3'd5;
reg [2:0] cstate;
reg [25:0] cnt_1s;
reg [23:0] cnt_200ms;
reg [3:0] led_r;
//计数器1s
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_1s <= 26'd0;
end
else if(cnt_1s == MAX_NUM)begin
cnt_1s <= 26'd0;
end
else begin
cnt_1s <= cnt_1s + 1'd1;
end
end
//计数器0.2s
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_200ms <= 24'd0;
end
else if(cnt_200ms == CNT_02)begin
cnt_200ms <= 24'd0;
end
else begin
cnt_200ms <= cnt_200ms + 1'd1;
end
end
//密码切换
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cstate <= S0;
end
else begin
case(cstate)
S0:begin
if(key[1])begin
cstate <=S1;
end
else if (key[0])begin
cstate <= S0;
end
else begin
cstate <= S0;
end
end
S1:begin
if(key[0])begin
cstate <=S2;
end
else if (key[1])begin
cstate <= S0;
end
else begin
cstate <= S1;
end
end
S2:begin
if(key[0])begin
cstate <=S3;
end
else if (key[1])begin
cstate <= S1;
end
else begin
cstate <= S2;
end
end
S3:begin
if(key[1])begin
cstate <=S4;
end
else if (key[0])begin
cstate <= S2;
end
else begin
cstate <= S3;
end
end
S4:begin
if(key[0])begin
cstate <=S5;
end
else if (key[1])begin
cstate <= S3;
end
else begin
cstate <= S4;
end
end
S5:begin
if(cnt_1s == MAX_NUM)begin
cstate <= S0;
end
else begin
cstate <= S5;
end
end
default:cstate <= S0;
endcase
end
end
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
led_r <= 4'b0000;
end
else begin
case(cstate)
S0: led_r <= 4'b0000;
S1: led_r <= 4'b0001;
S2: led_r <= 4'b0011;
S3: led_r <= 4'b0111;
S4: led_r <= 4'b1111;
S5: begin
if(cnt_200ms == CNT_02)begin
led_r <= ~led_r;
end
else begin
led_r <= led_r ;
end
end
default:led_r <= 4'b0000;
endcase
end
end
assign led = led_r;
endmodule
(2)按键消抖模块key_debouce.v
module key_debouce(
input wire clk,//1s震荡50_000_000次
input wire rst_n,
input wire key,//当前的按键取值
output wire flag,//幻断抖动是否消除的标志信号,0为抖动,1为抖动结束
output wire key_value//肖抖后稳定的按键值,给到蜂鸣器模块
);
parameter MAX_NUM =20'd1_000_000;
//定义20ms延迟计数器,0.02s秒,1_000_000c次
reg [19:0] cnt_delay;
//寄存一次key的值,用来判断按键是否消抖成功
reg key_reg;
reg flag_r;
reg key_value_r;
//20ms延时计数器
always@(posedge clk or negedge rst_n)begin
if(!rst_n) begin //按下复位键
key_reg <= 1'b1; //key变为高电平
cnt_delay <= 20'd0; //计数器清零
end
else begin
key_reg <= key;
if(key_reg == 1'b1 && key == 1'b0 )begin//当这一次的key值和上一次的key值不相等时,证明按键状态在抖动
cnt_delay <= MAX_NUM;//延迟计数器设置为20ms
end
else if(cnt_delay <= 20'd0)begin
cnt_delay<= 20'd0;
end
else begin
cnt_delay <= cnt_delay - 1'd1;//抖动结束开始递减
end
end
end
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)begin
flag_r <= 1'b0; //按键初始值为低电平
end
else if(cnt_delay == 20'd1) begin//初始赋值为0,,避免为0,倒计时20到1是20个数,倒计时结束
flag_r <= 1'b1;
end
else begin
flag_r <= 1'b0;
end
end
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)begin
key_value_r <= 1'b1; //按键初始值为低电平
end
else if(cnt_delay == 20'd1) begin//初始赋值为0,,避免为0,倒计时20到1是20个数,倒计时结束
key_value_r <= ~key;
end
else begin
key_value_r <= key_value;
end
end
assign flag = flag_r;
assign key_value = key_value_r;
endmodule
(3)顶层模块check.v
module check(
input wire clk,//1s震荡50_000_000次
input wire rst_n,
input wire [1:0] key,//当前的按键取值
output wire [3:0] led//肖抖后稳定的按键值,给到蜂鸣器模块
);
wire [1:0] key_value;
wire [1:0] flag;
key_debouce inst_key_debouce(
.clk (clk),//1s震荡50_000_000次
.rst_n (rst_n),
.key (key[1]),//当前的按键取值
.flag (flag[1]),//幻断抖动是否消除的标志信号,0为抖动,1为抖动结束
.key_value (key_value[1])//肖抖后稳定的按键值,给到蜂鸣器模块
);
key_debouce inst_key_debouce1(
.clk (clk),//1s震荡50_000_000次
.rst_n (rst_n),
.key (key[0]),//当前的按键取值
.flag (flag[0]),//幻断抖动是否消除的标志信号,0为抖动,1为抖动结束
.key_value (key_value[0])//肖抖后稳定的按键值,给到蜂鸣器模块
);
deal inst_deal(
.clk (clk),
.rst_n (rst_n),
.key ({(flag[1]&&key_value[1]),(flag[0]&&key_value[0])}),
.led (led)
);
endmodule
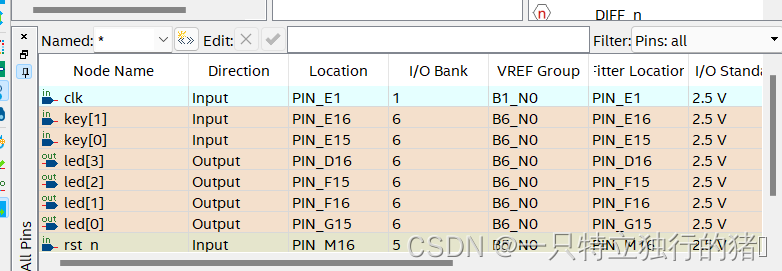
2.引脚绑定
3.结果
四、总结
经过一段时间对的学习,掌握了FPGA设计的基本思路和方法。本次实验用到状态机,实现不同状态的切换,可以让程序结构分明、易读易懂易排错,逻辑清晰。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









