







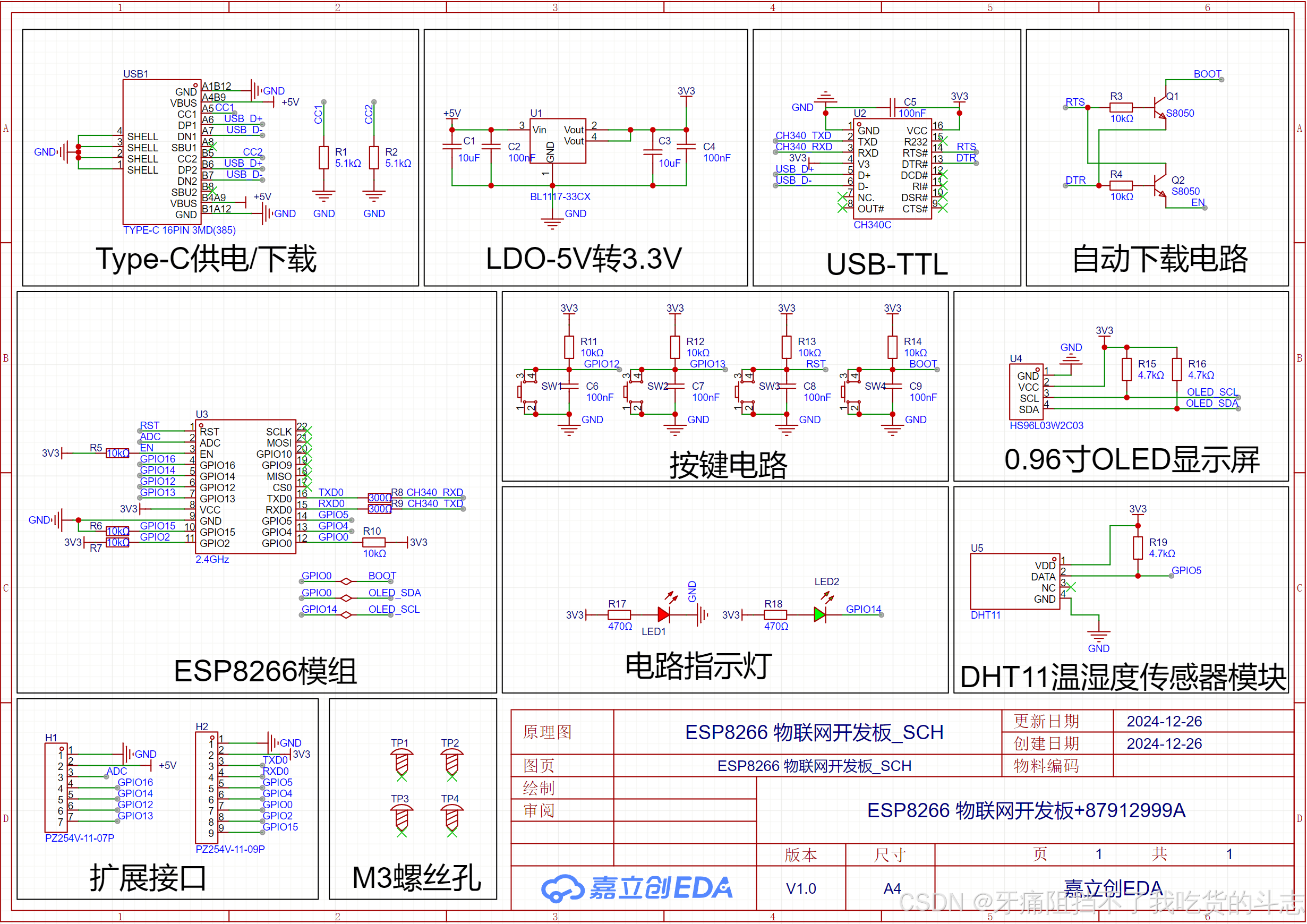
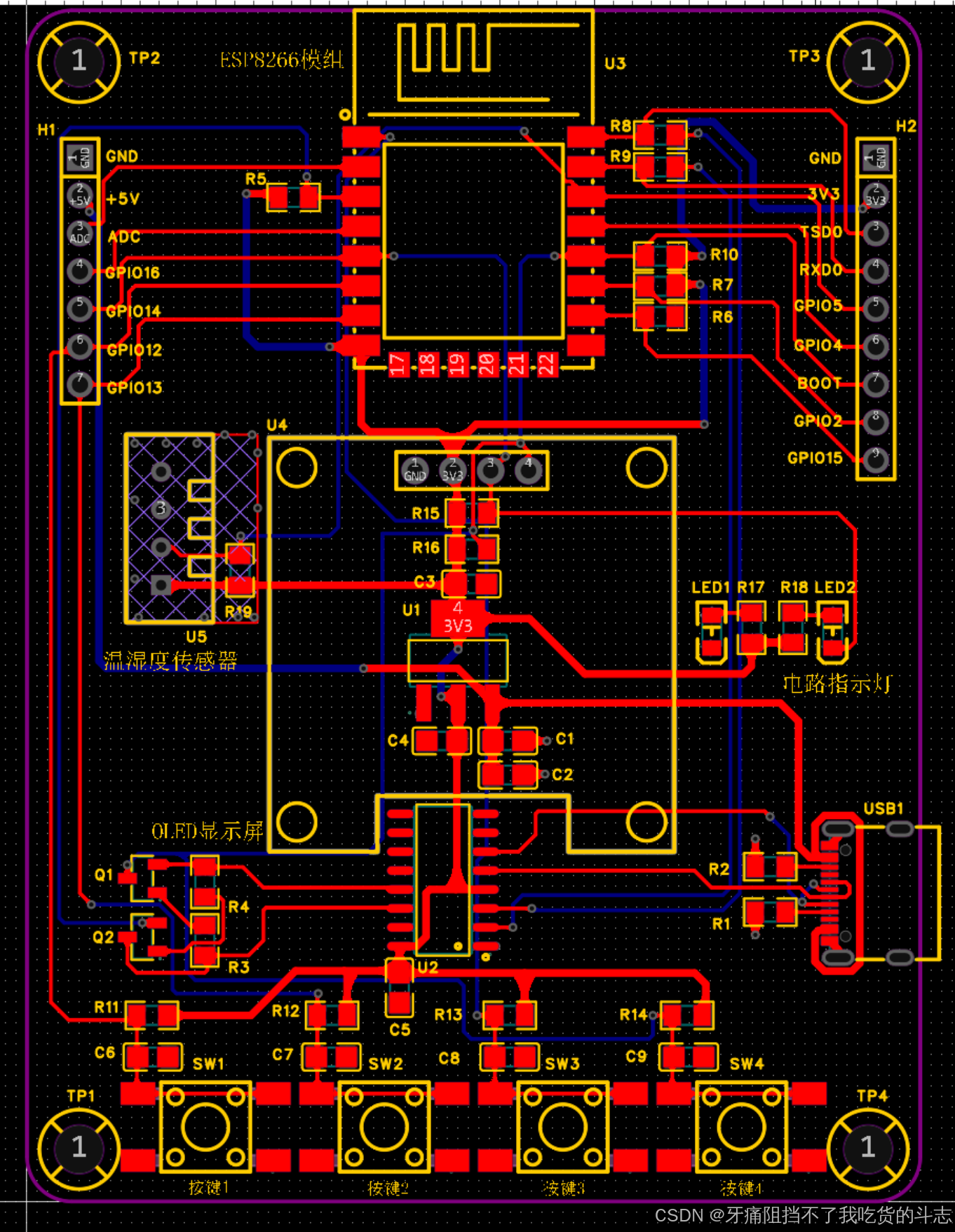
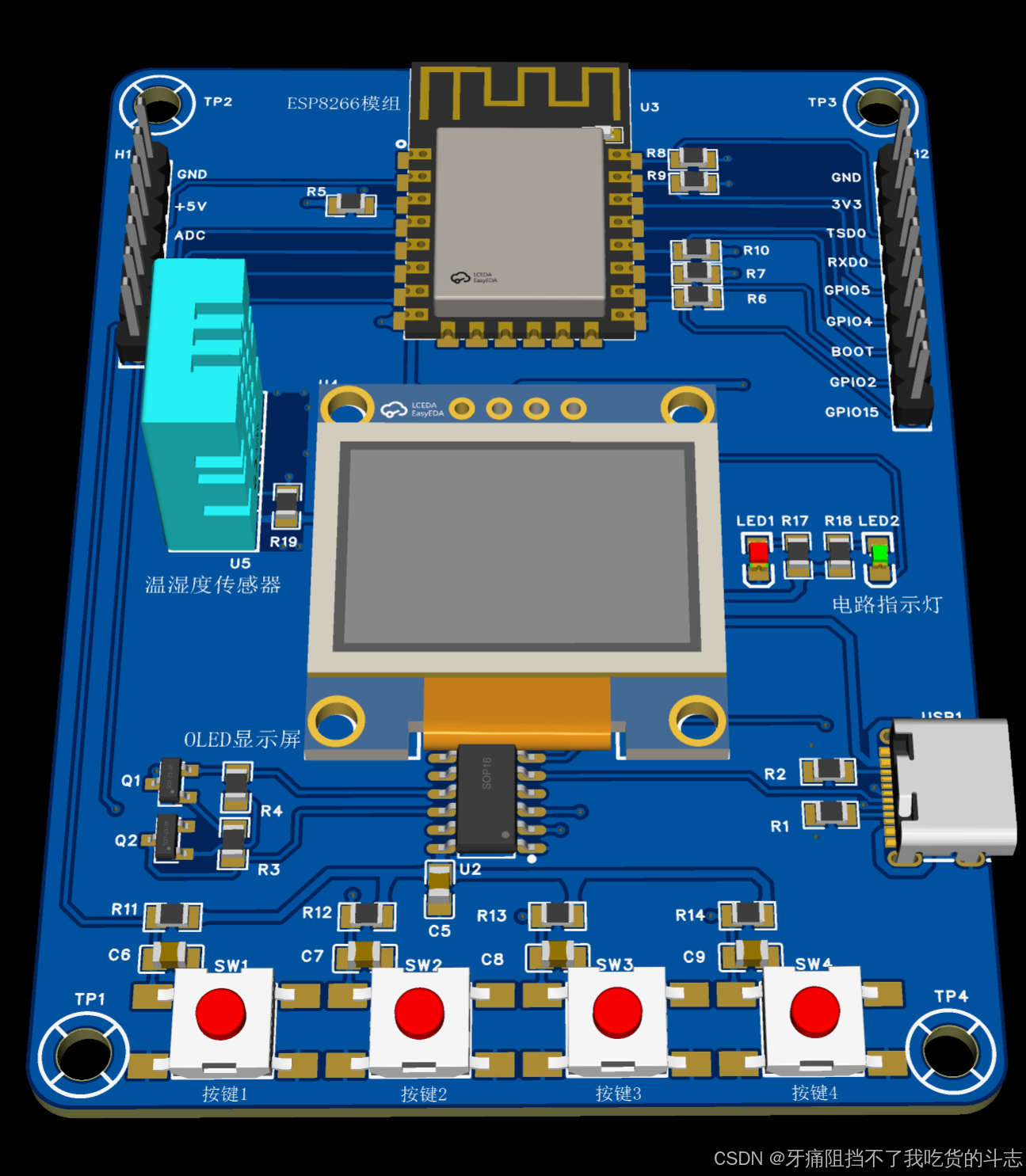
ESP8266_物联网开发板
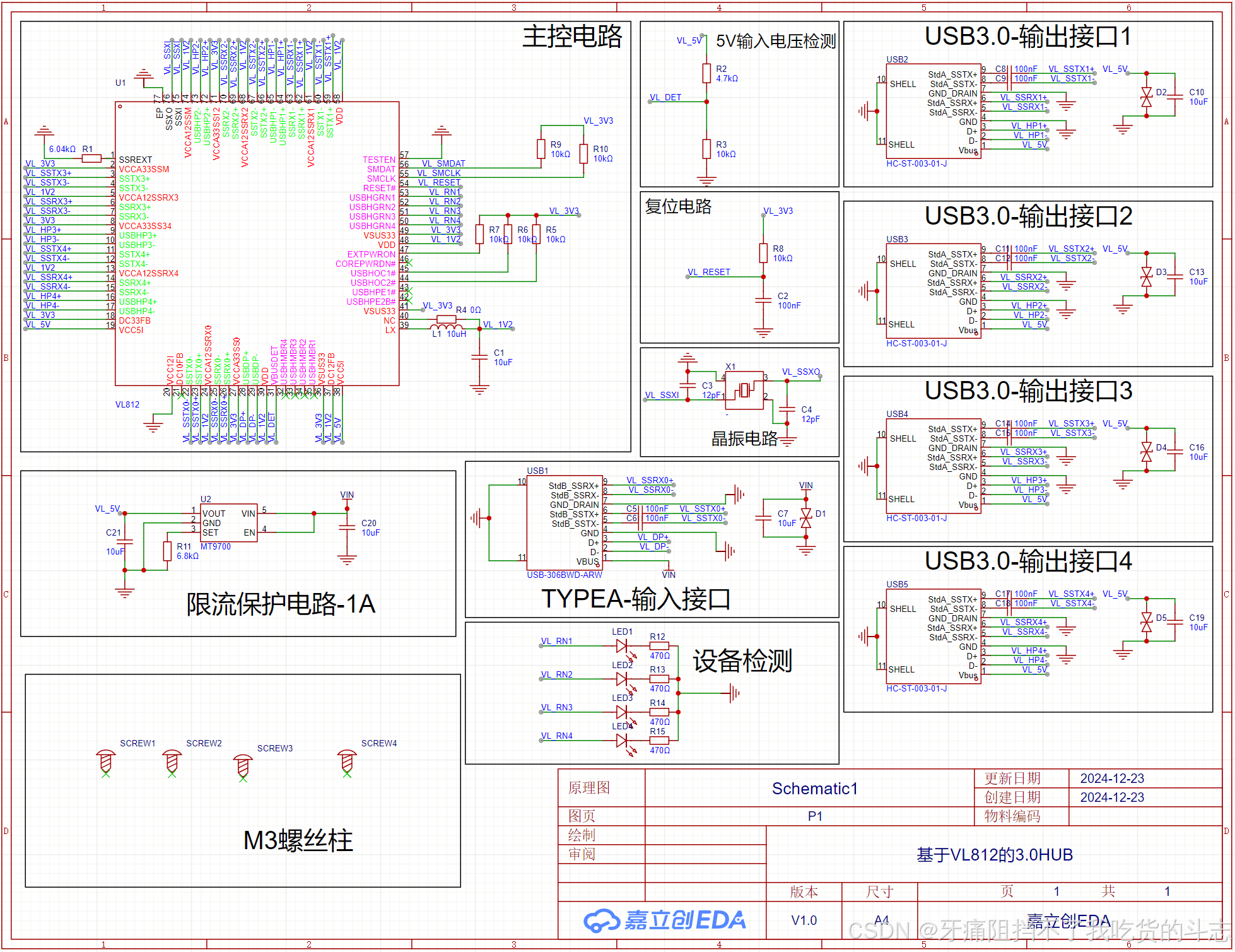
基于VL812的3.0HUB
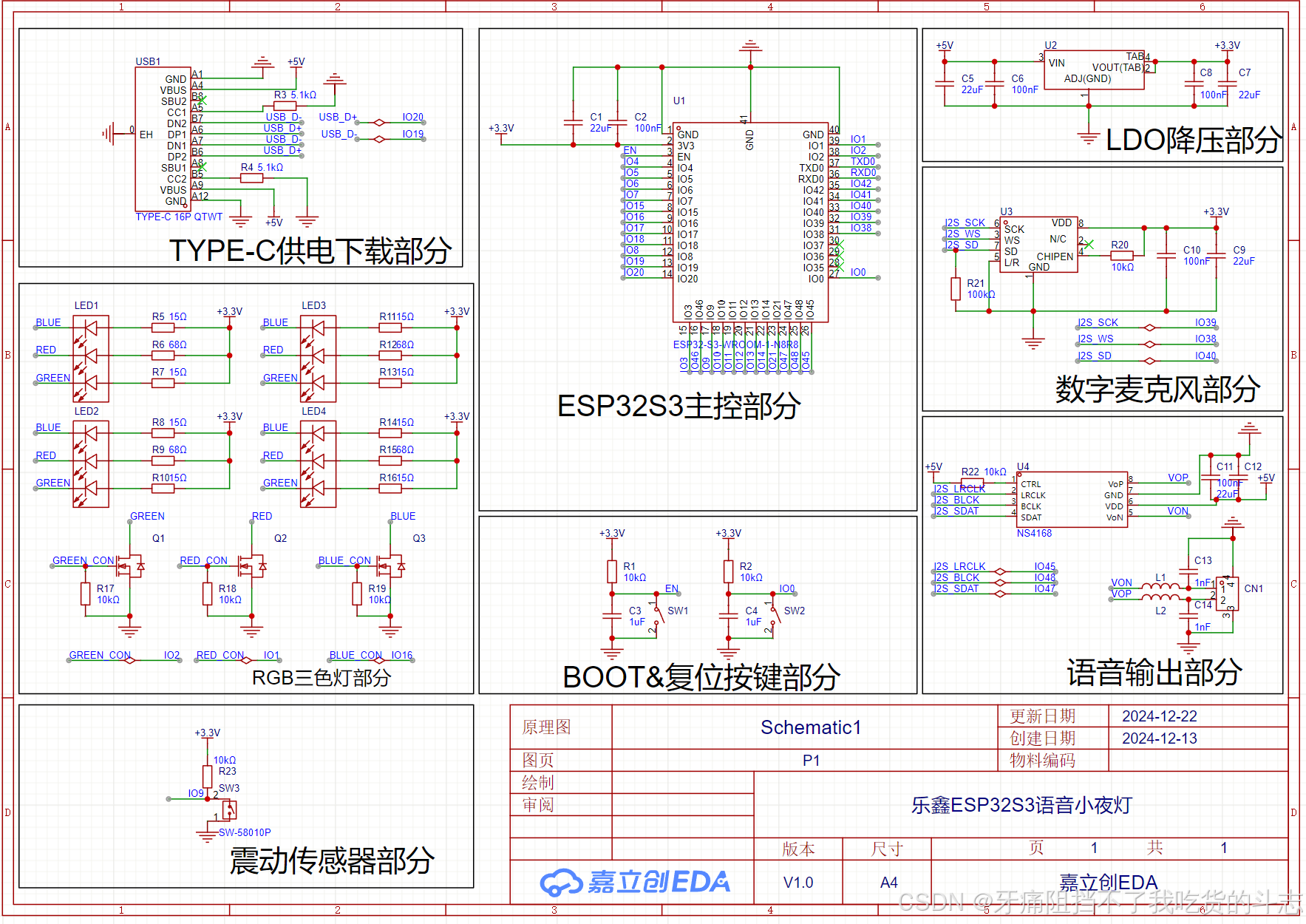
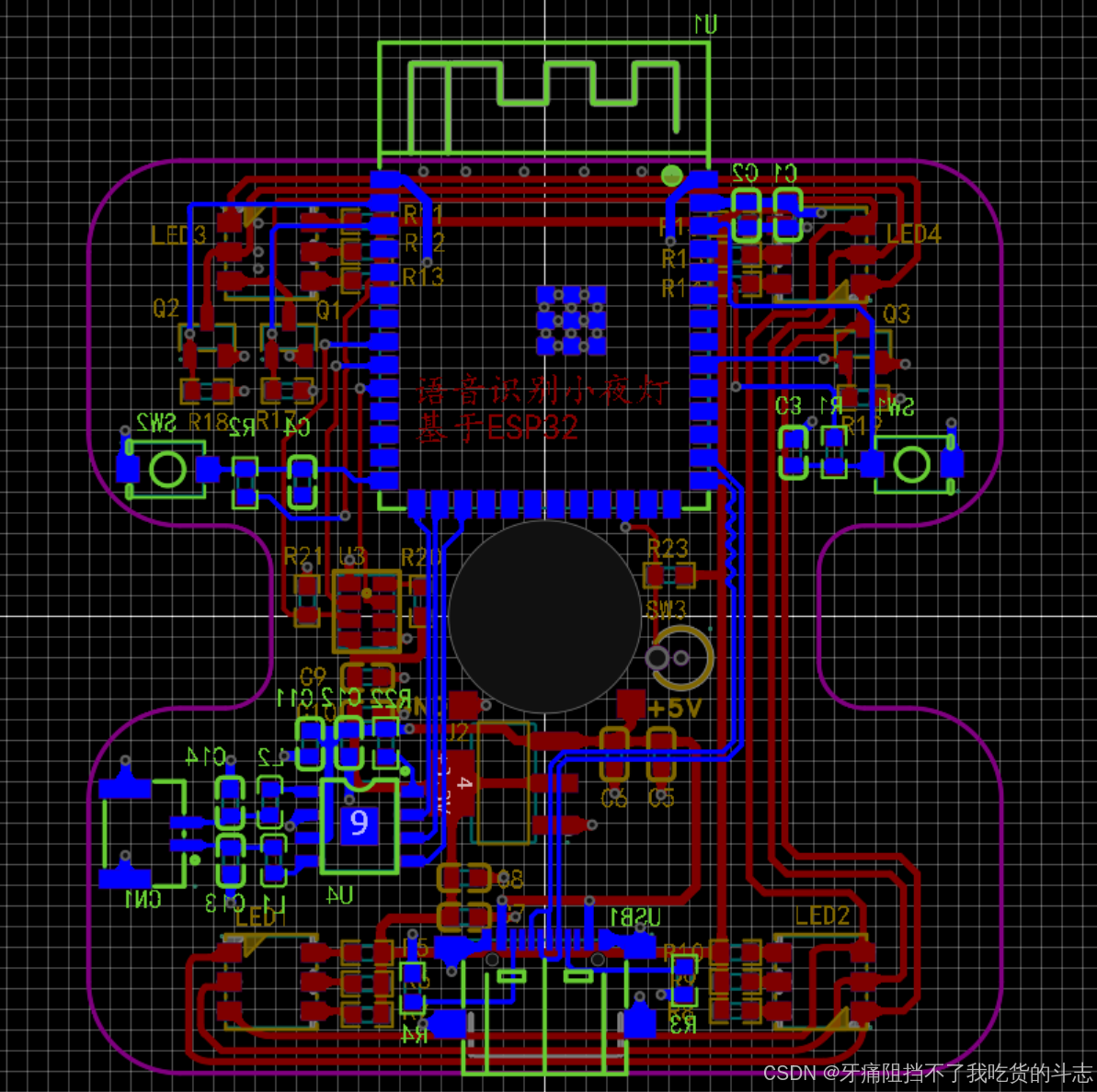
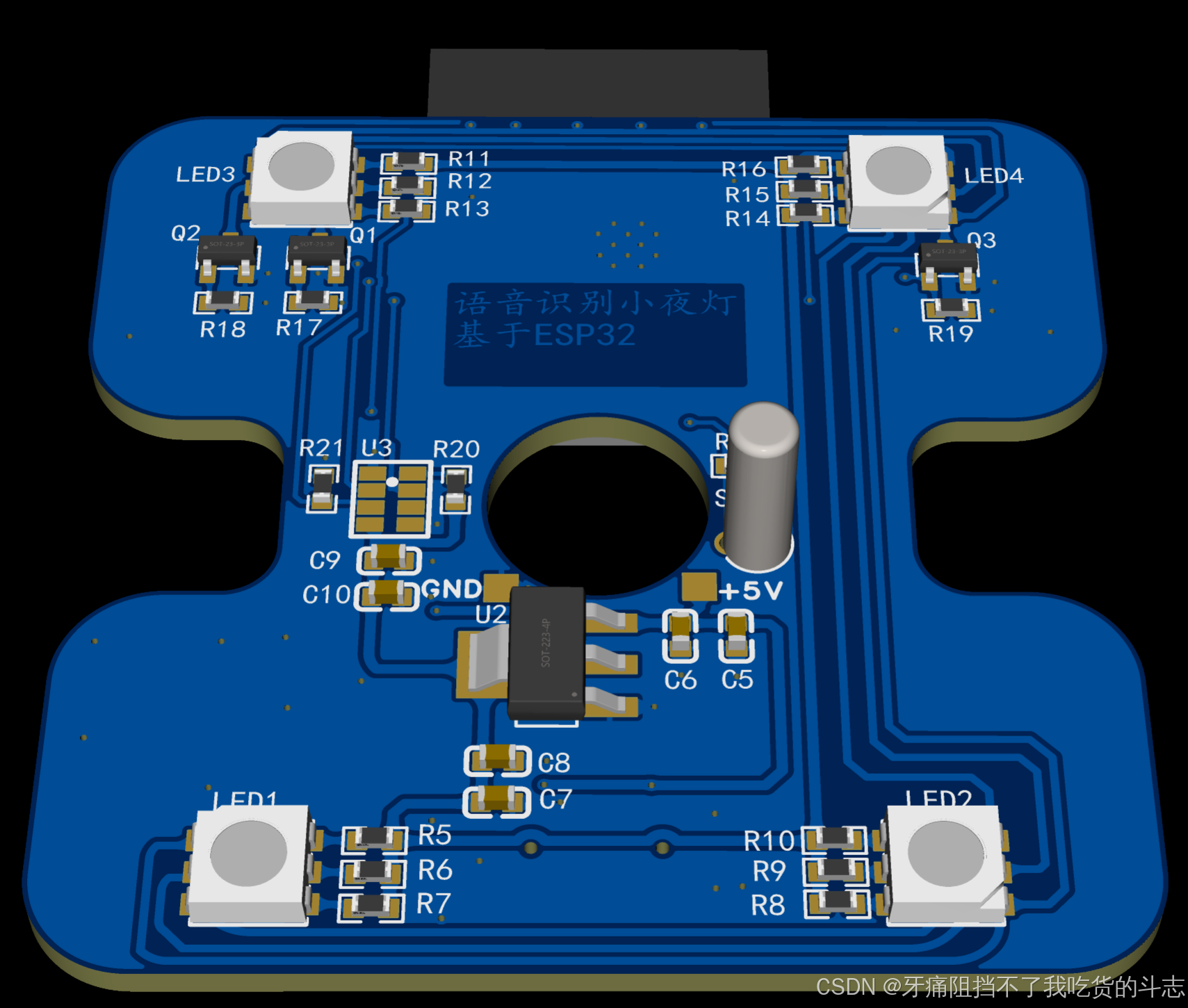
ESP32S3语音小夜灯
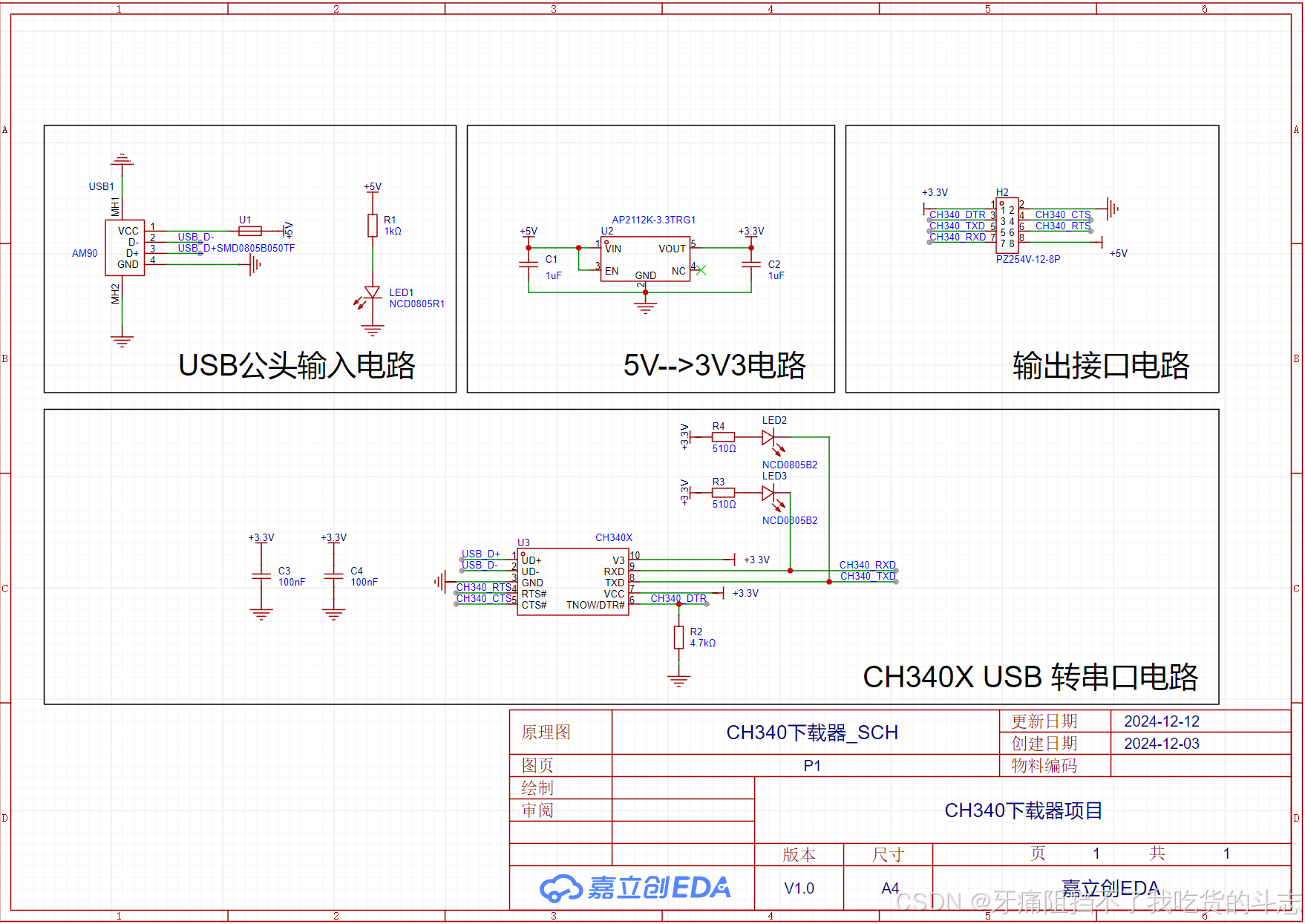
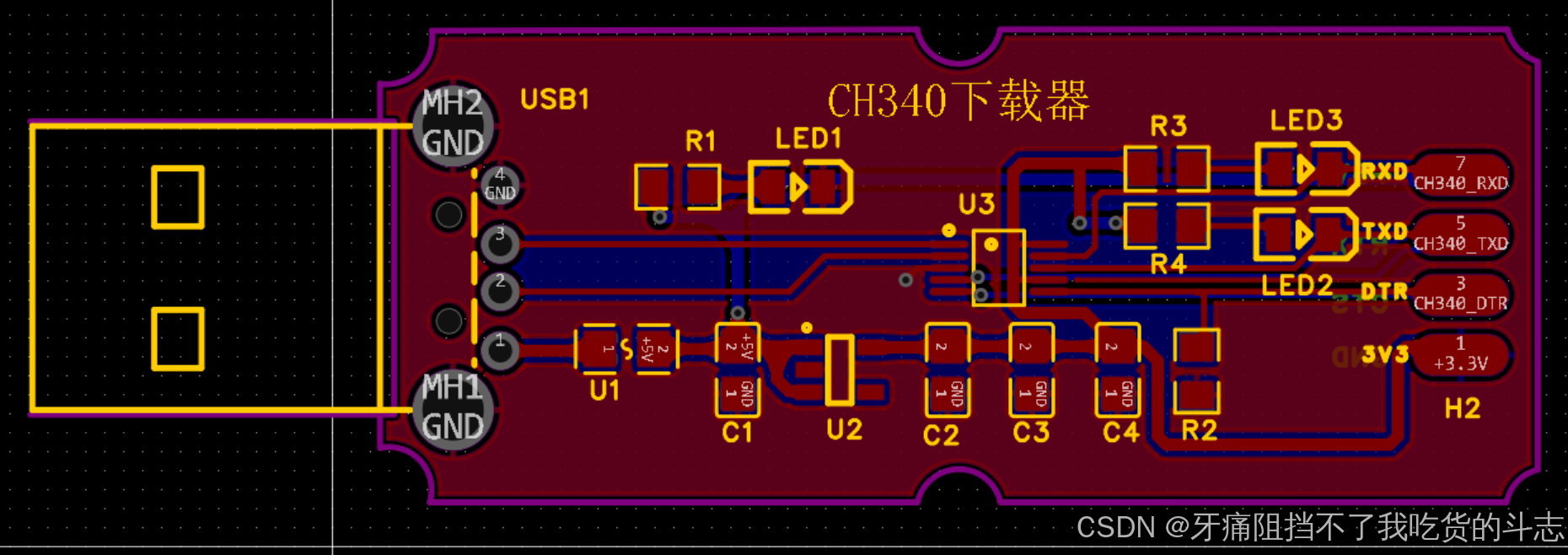
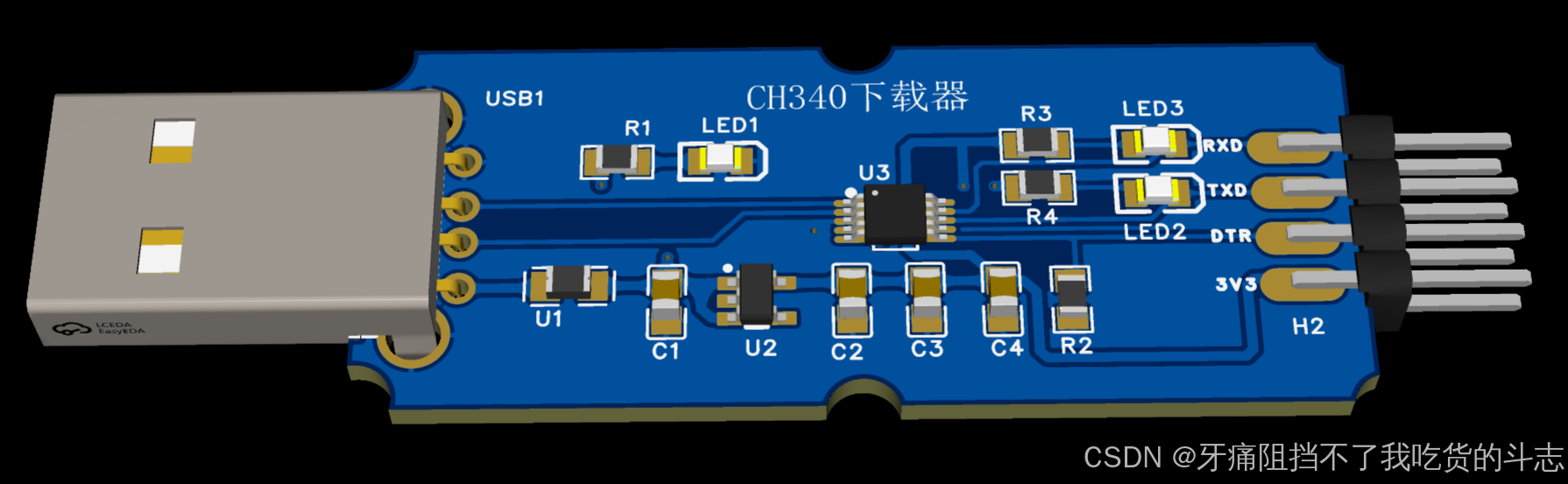
CH340下载器
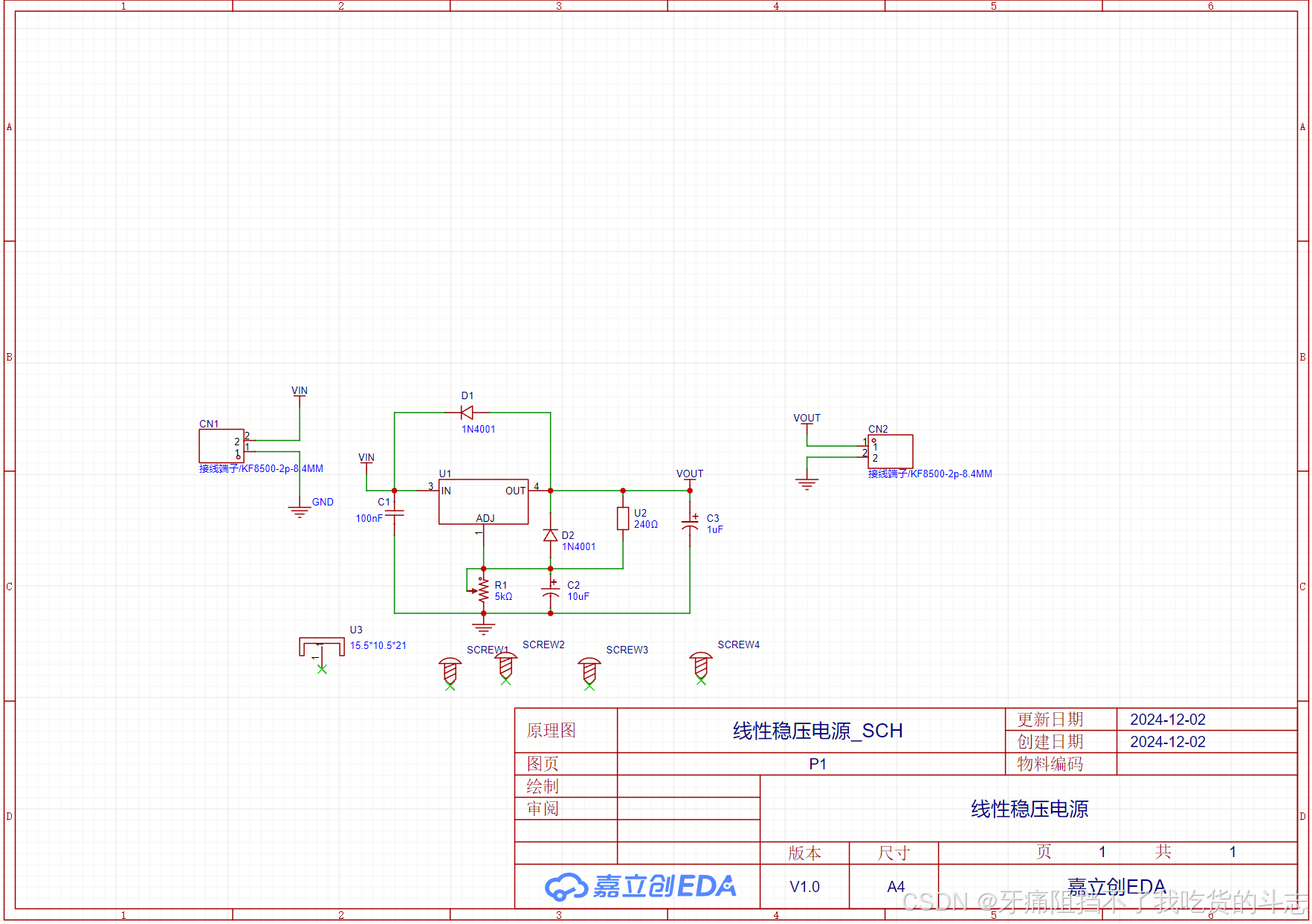
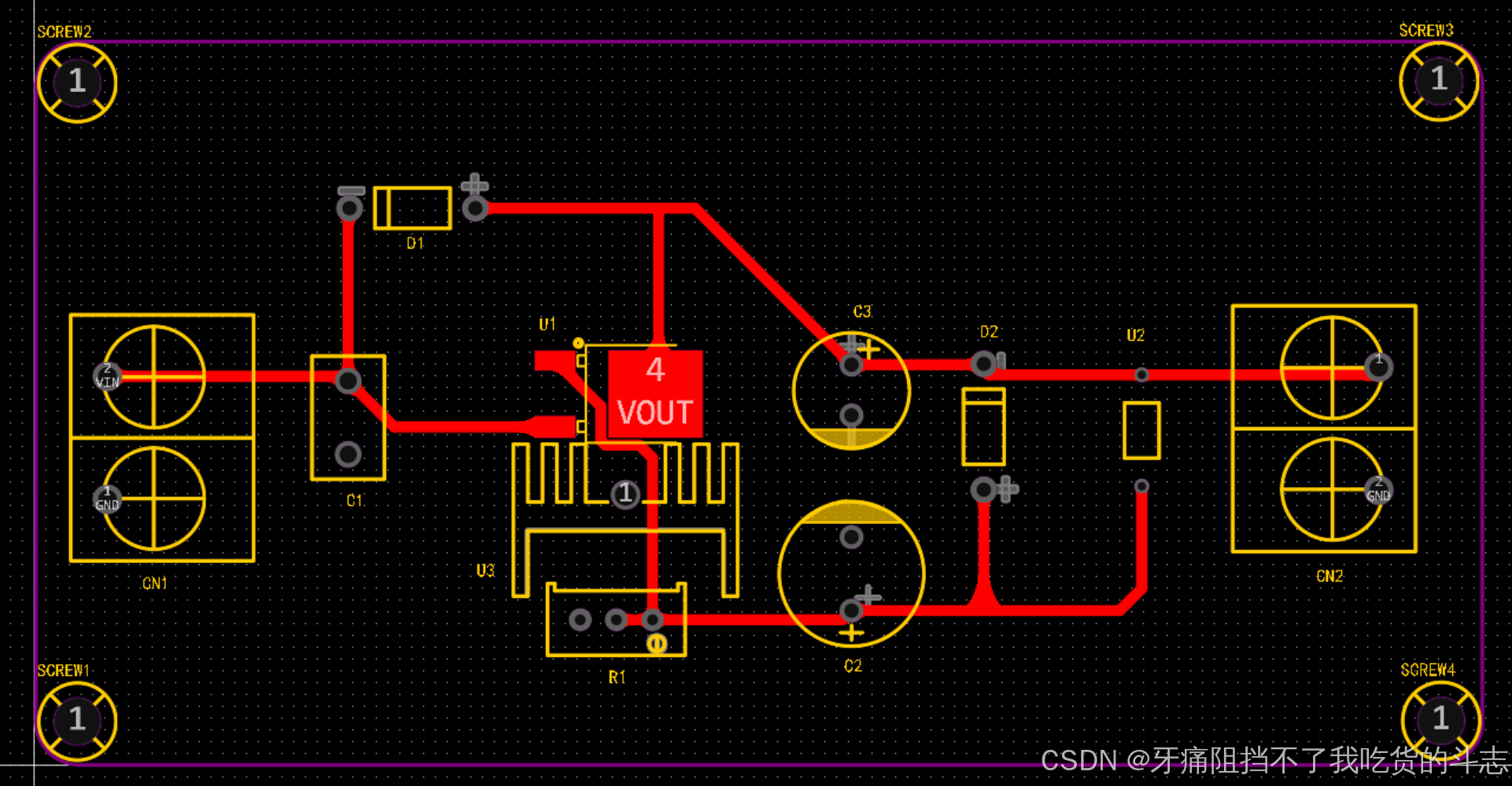
线性稳压电源
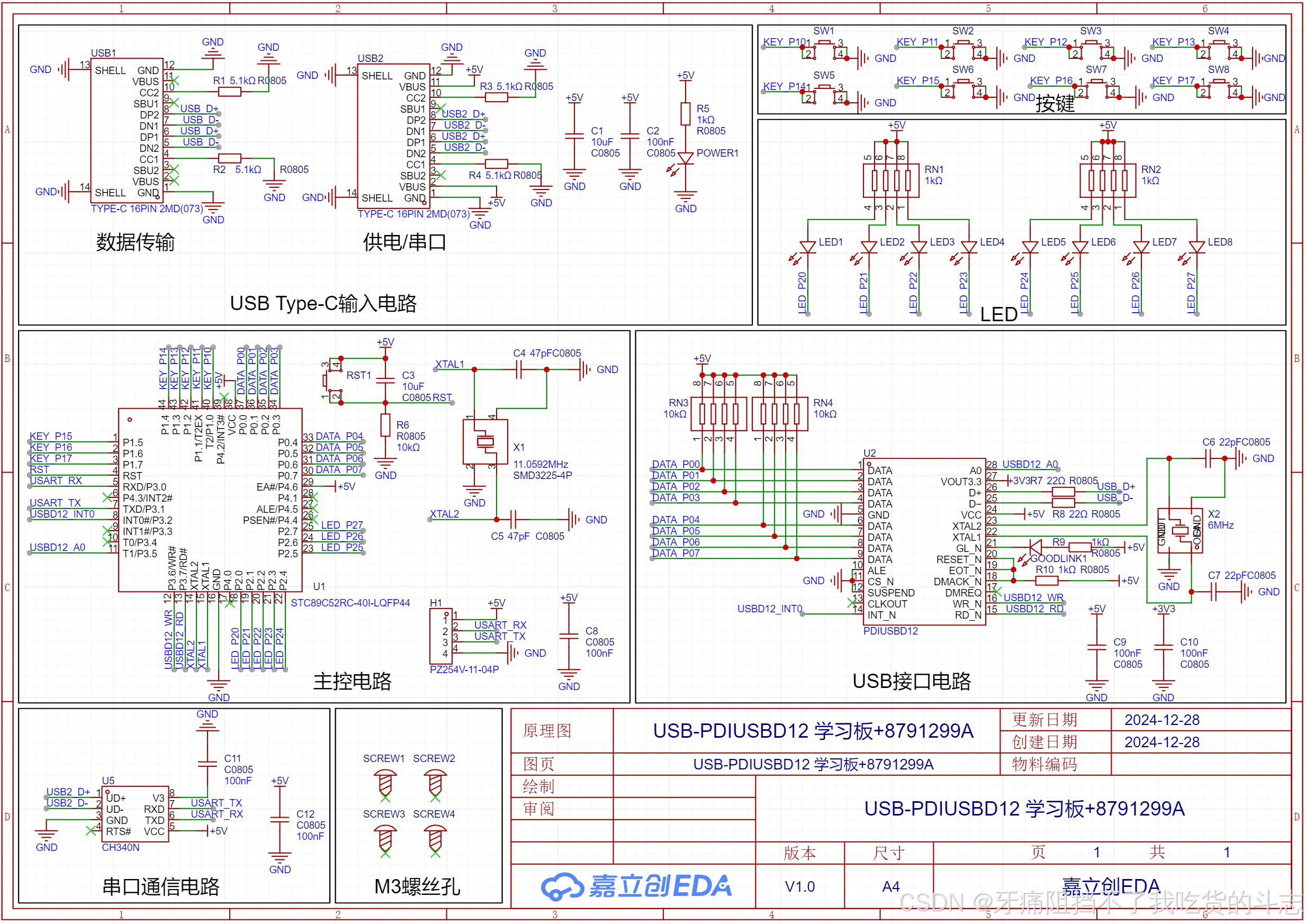
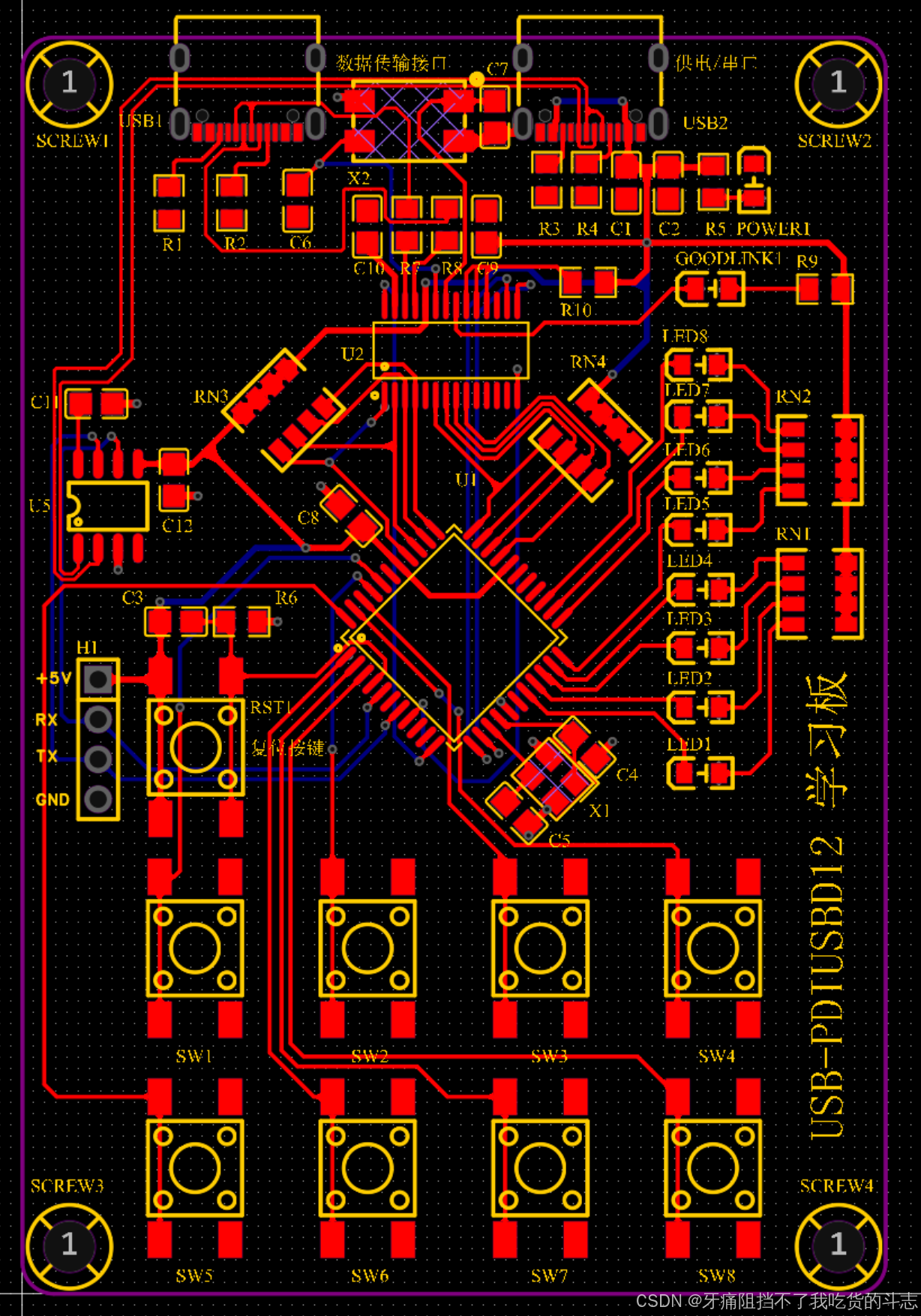
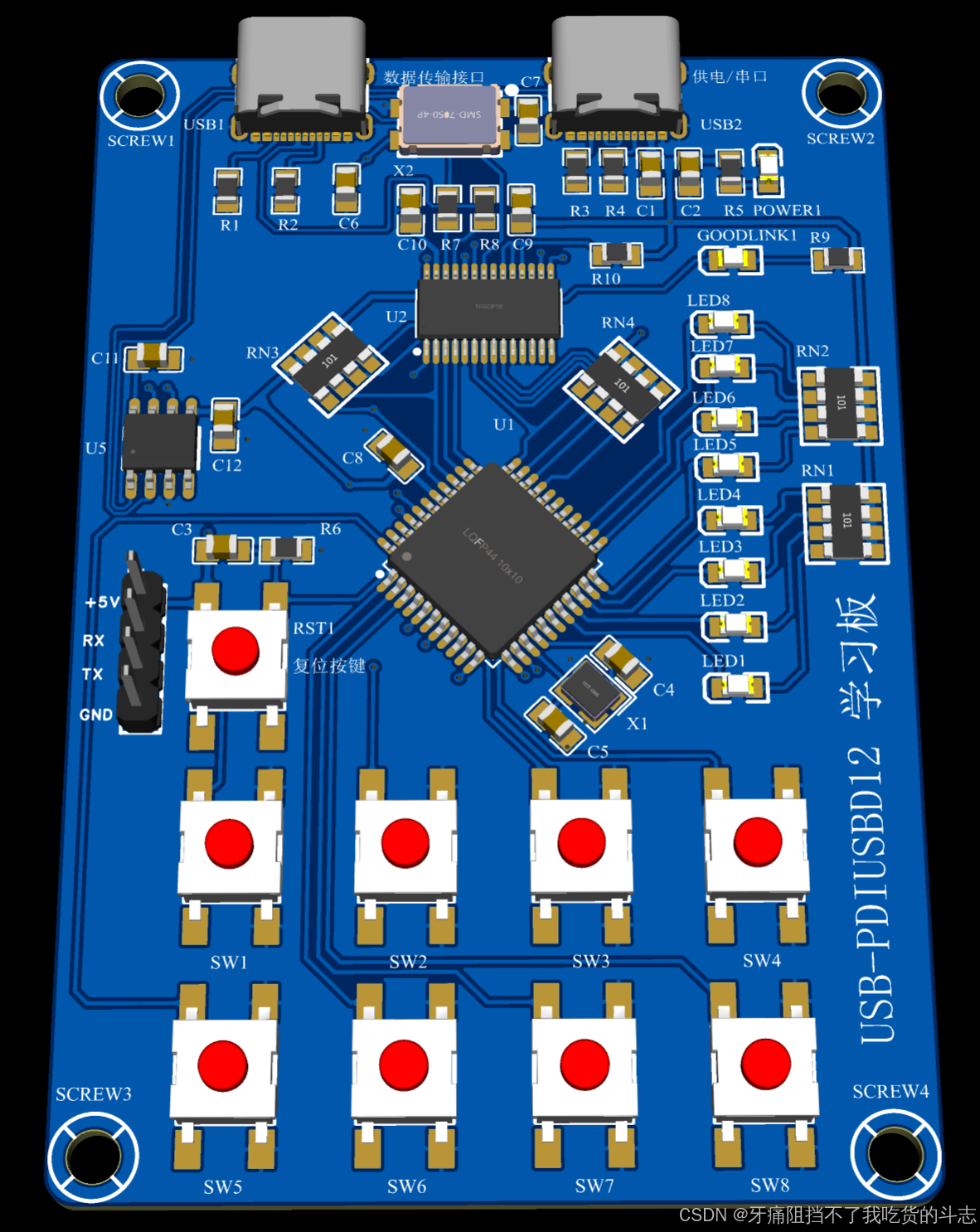
USB-PDIUSBD12 学习板
测试代码(和上文无关,防止csdn吞掉我的文章)
w_max = 20*pi/180; % 角速度最大值
%起点集合
% start_x = [0 50 50 100 0 110 -20.71 120.71] ;
% start_y = [0 120 -20.71 0 110 90 50 50];
% start_z= 10 * sqrt(2) * ones(1, drones_num);% 初始z坐标
% thitaf = [90*pi/180,90*pi/180,90*pi/180,90*pi/180,90*pi/180,90*pi/180,90*pi/180,90*pi/180]; % 终止航向角 没用到
% thita0 = [40*pi/180,70*pi/180,60*pi/180,10*pi/180,40*pi/180,70*pi/180,60*pi/180,10*pi/180];% 初始航向角 没用到
%%%%%%%%%%%%%%%%%%%%%%%%角度测试
start_x = [0 50 50 100 0 ] ;
start_y = [0 120 -20.71 0 110 ];
start_z= 10 * sqrt(2) * ones(1, drones_num);% 初始z坐标
thitaf = 45*pi/180* ones(1, drones_num); % 终止航向角 没用到
thita0 = 0*pi/180* ones(1, drones_num);% 初始航向角 没用到
xf = 50; % 终止横坐标
yf = 50; % 终止横坐标
zf = 65*sqrt(2); % 终止横坐标


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









