




 本文详细讲解了如何计算三角形的边界框,使用叉乘法判断点是否在三角形内,以及MSAA4X技术中的深度和颜色采样。重点介绍了`insideTriangle`函数实现和`rasterize_triangle`中的多分辨率抗锯齿算法应用。
本文详细讲解了如何计算三角形的边界框,使用叉乘法判断点是否在三角形内,以及MSAA4X技术中的深度和颜色采样。重点介绍了`insideTriangle`函数实现和`rasterize_triangle`中的多分辨率抗锯齿算法应用。
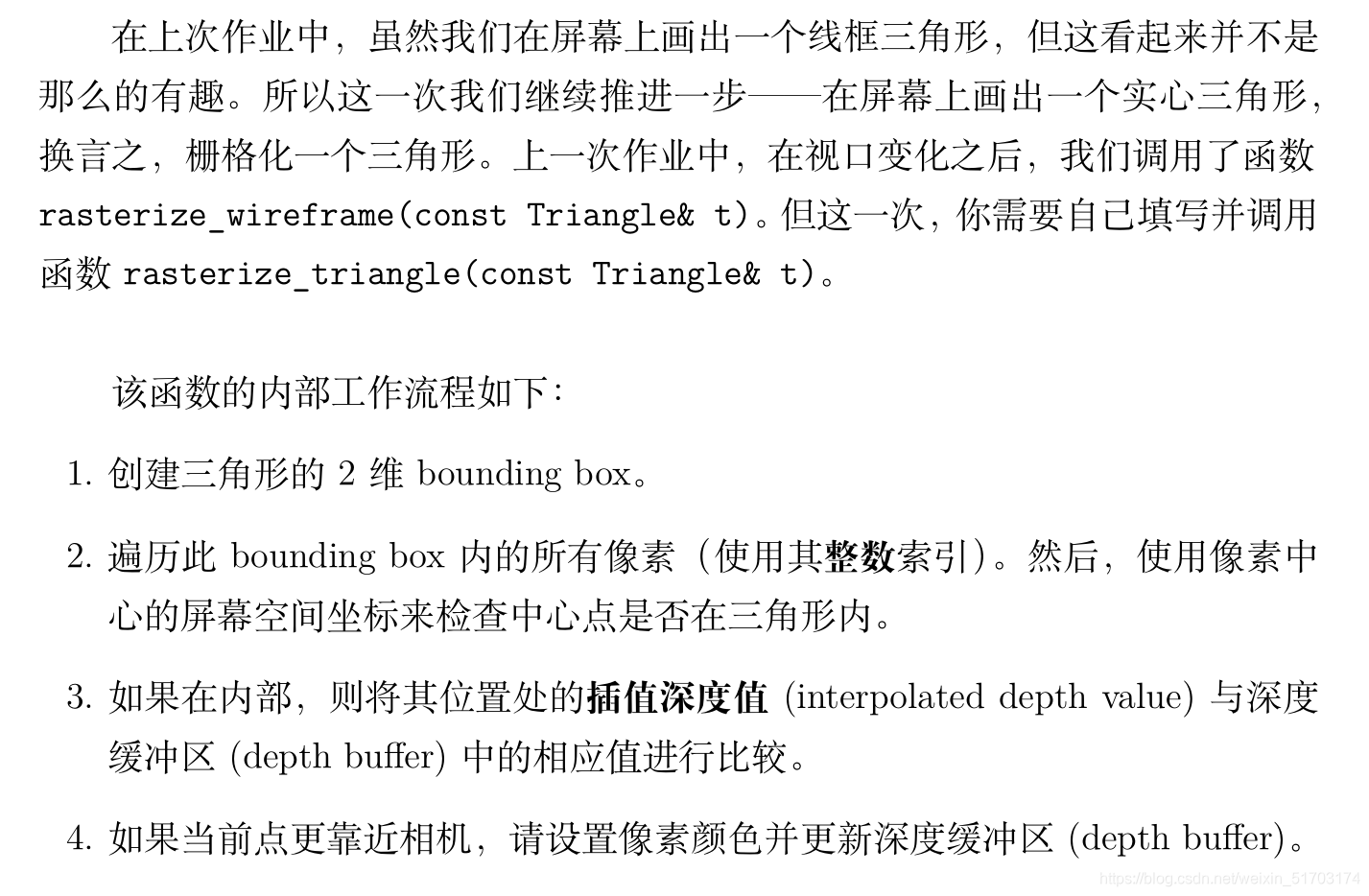
作业描述
函数修改
(1)寻找三角形的 bounding box:根据三角形的三个顶点坐标,找出最大 x 坐标、最小 x 坐标、最大 y 坐标、最小 y 坐标。需要注意的就是最小 x、y坐标需要比原数小;最大 x、y坐标需要比原数大。
(2)点是否在三角形内:连接该点与三角形三个点形成一系列向量,然后判断叉乘的结果的正负是否一致。
(3)MSAA 4X 深度:把一个点看成一个格子,判断里面4个小点是否落在三角形内,然后找到其中的最小 z 值,和帧缓冲中的 z 值进行比较替换。
(4)MSAA 4X 颜色:判断4个小点有几个落入三角形内,然后按比例对颜色进行采样。
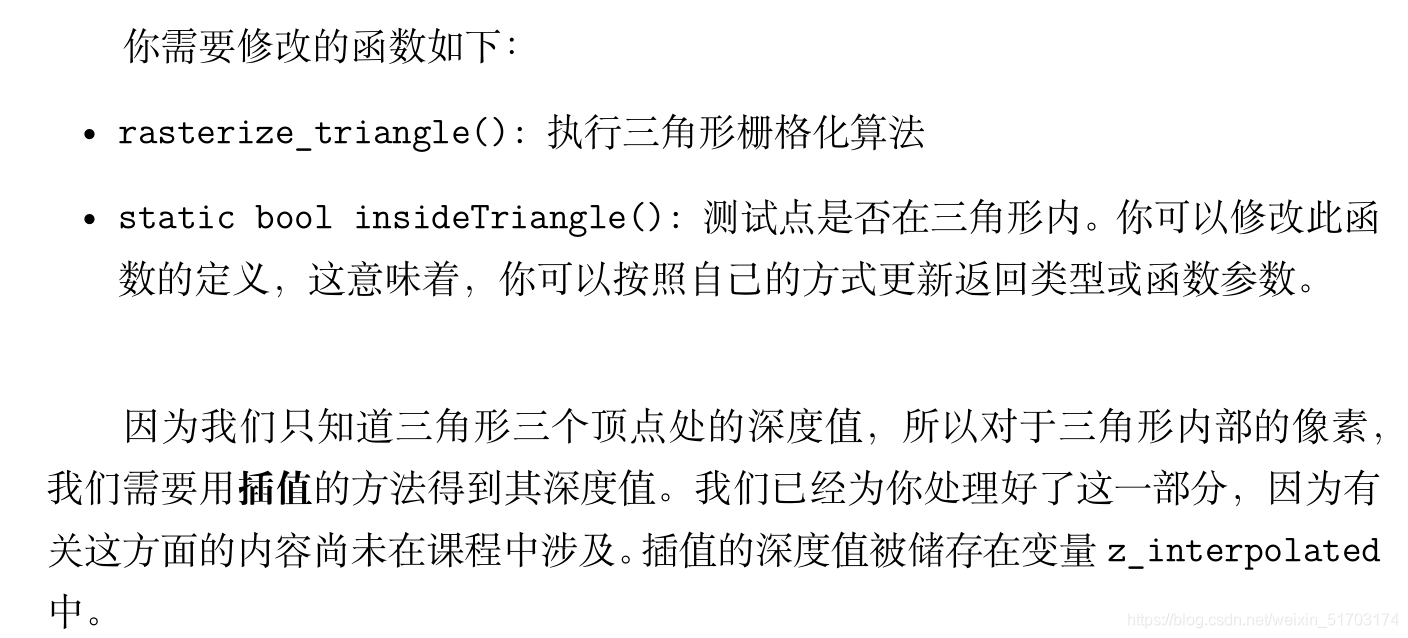
insideTriangle函数
static bool insideTriangle(int x, int y, const Vector3f* _v)
{
// TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]
// 三角形三个顶点形成的向量
Eigen::Vector3f a1 = { _v[0].x() - _v[1].x(), _v[0].y() - _v[1].y(), 0 };
Eigen::Vector3f a2 = { _v[1].x() - _v[2].x(), _v[1].y() - _v[2].y(), 0 };
Eigen::Vector3f a3 = { _v[2].x() - _v[0].x(), _v[2].y() - _v[0].y(), 0 };
// 该点与三角形三个顶点形成的向量
Eigen::Vector3f b1 = { x - _v[1].x(), y - _v[1].y(), 0 };
Eigen::Vector3f b2 = { x - _v[2].x(), y - _v[2].y(), 0 };
Eigen::Vector3f b3 = { x - _v[0].x(), y - _v[0].y(), 0 };
// 做叉乘
float c1 = a1.cross(b1).z();
float c2 = a2.cross(b2).z();
float c3 = a3.cross(b3).z();
if ((c1 >= 0 && c2 >= 0 && c3 >= 0) || (c1 < 0 && c2 < 0 && c3 < 0))
return true;
else
return false;
}
rasterize_triangle函数
void rst::rasterizer::rasterize_triangle(const Triangle& t) {
auto v = t.toVector4();
// bounding box
float min_x = std::min(v[0][0], std::min(v[1][0], v[2][0]));
float max_x = std::max(v[0][0], std::max(v[1][0], v[2][0]));
float min_y = std::min(v[0][1], std::min(v[1][1], v[2][1]));
float max_y = std::max(v[0][1], std::max(v[1][1], v[2][1]));
min_x = (int)std::floor(min_x);
max_x = (int)std::ceil(max_x);
min_y = (int)std::floor(min_y);
max_y = (int)std::ceil(max_y);
bool MSAA = false;
// MSAA 4X
if (MSAA)
{
std::vector<Eigen::Vector2f> pos
{
{0.25, 0.25},
{0.75, 0.25},
{0.25, 0.75},
{0.75, 0.75},
};
for (int x = min_x; x <= max_x; ++x)
{
for (int y = min_y; y <= max_y; ++y)
{
// 记录最小深度
float minDepth = FLT_MAX;
// 四个小点中落入三角形中的点的个数
int count = 0;
// 对四个小点进行判断
for (int i = 0; i < 4; ++i)
{
// 小点是否在三角形内
if (insideTriangle((float)x + pos[i][0], (float)y + pos[i][1], t.v))
{
// 如果在,读深度 z 进行插值
auto tuple = computeBarycentric2D((float)x + pos[i][0], (float)y + pos[i][1], t.v);
float alpha;
float beta;
float gamma;
std::tie(alpha, beta, gamma) = tuple;
float w_reciprocal = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
minDepth = std::min(minDepth, z_interpolated);
++count;
}
}
if (count != 0)
{
if (depth_buf[get_index(x, y)] > minDepth)
{
Eigen::Vector3f color = t.getColor() * count / 4.0;
Eigen::Vector3f point(3);
point << (float)x, (float)y, minDepth;
// 替换深度
depth_buf[get_index(x, y)] = minDepth;
// 修改颜色
set_pixel(point, color);
}
}
}
}
}
else
{
for (int x = min_x; x <= max_x; ++x)
{
for (int y = min_y; y <= max_y; ++y)
{
if (insideTriangle((float)x + 0.5, (float)y + 0.5, t.v))
{
auto tuple = computeBarycentric2D((float)x + 0.5, (float)y + 0.5, t.v);
float alpha;
float beta;
float gamma;
std::tie(alpha, beta, gamma) = tuple;
float w_reciprocal = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
if (depth_buf[get_index(x, y)] > z_interpolated)
{
Eigen::Vector3f color = t.getColor();
Eigen::Vector3f point(3);
point << (float)x, (float)y, z_interpolated;
depth_buf[get_index(x, y)] = z_interpolated;
set_pixel(point, color);
}
}
}
}
}
}
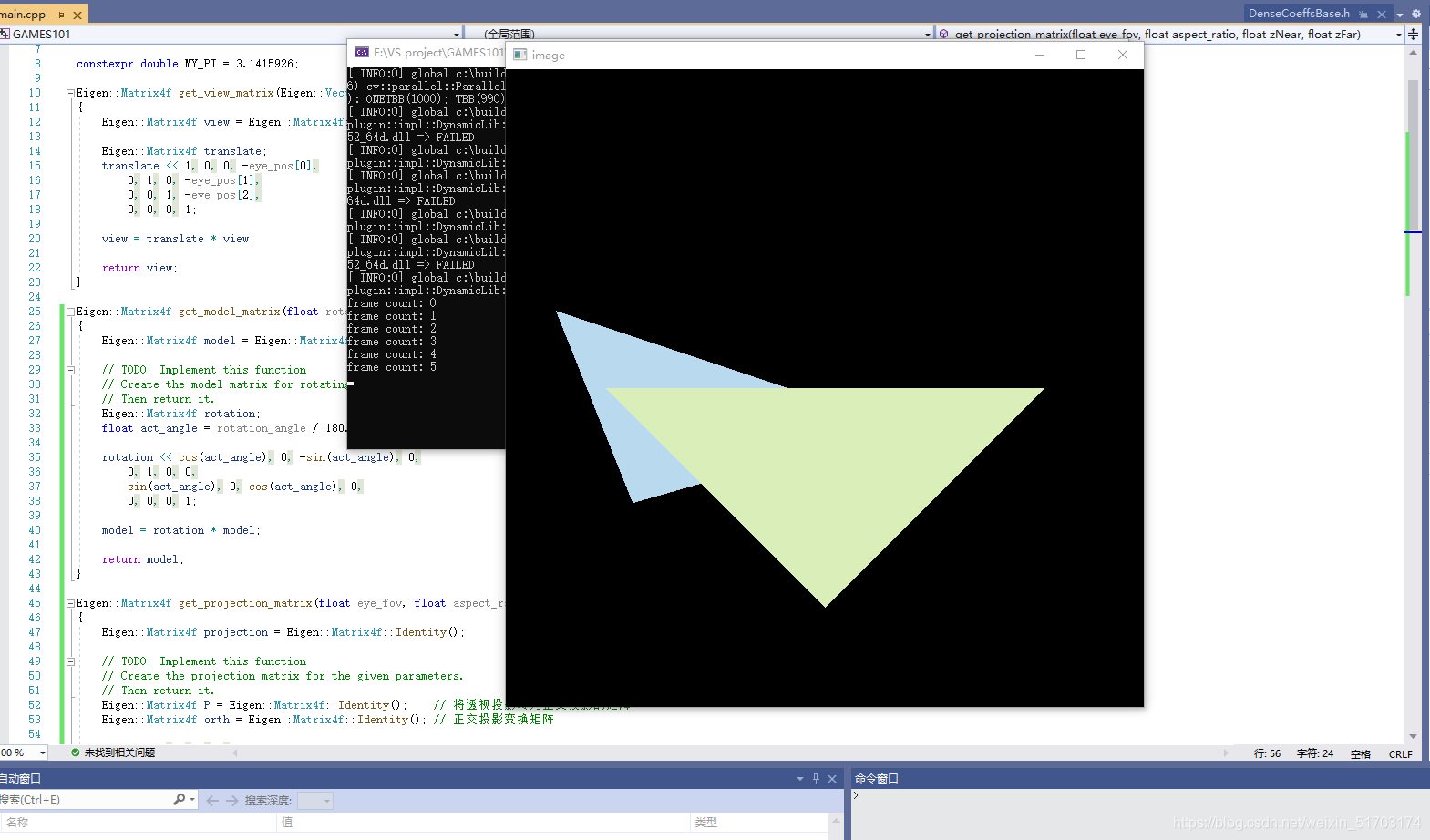
结果展示
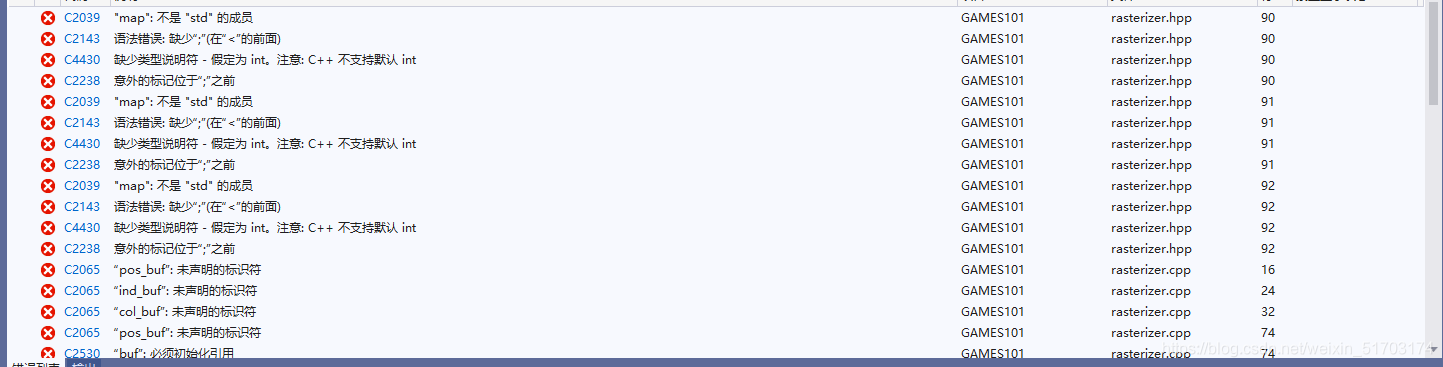
如果发生上述情况错误,记得在 rasterizer.hpp中添加一条语句#include<map>


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









