




 该博客详细介绍了如何在Ubuntu 18.04系统上配置ROS Melodic和Velodyne VLP16激光雷达。首先,确保系统和ROS版本正确,然后将电脑IP设置为与雷达在同一网段。接着,安装必要的依赖,下载并编译velodyne功能包。通过运行特定的launch文件和Rviz,可以成功显示点云数据。此外,还计算了Velodyne16线激光雷达的理论点云数。
该博客详细介绍了如何在Ubuntu 18.04系统上配置ROS Melodic和Velodyne VLP16激光雷达。首先,确保系统和ROS版本正确,然后将电脑IP设置为与雷达在同一网段。接着,安装必要的依赖,下载并编译velodyne功能包。通过运行特定的launch文件和Rviz,可以成功显示点云数据。此外,还计算了Velodyne16线激光雷达的理论点云数。
1.环境配置
系统:Ubuntu18.04
ros:melodic
传感器:Velodyne VLP16
2.IP设置
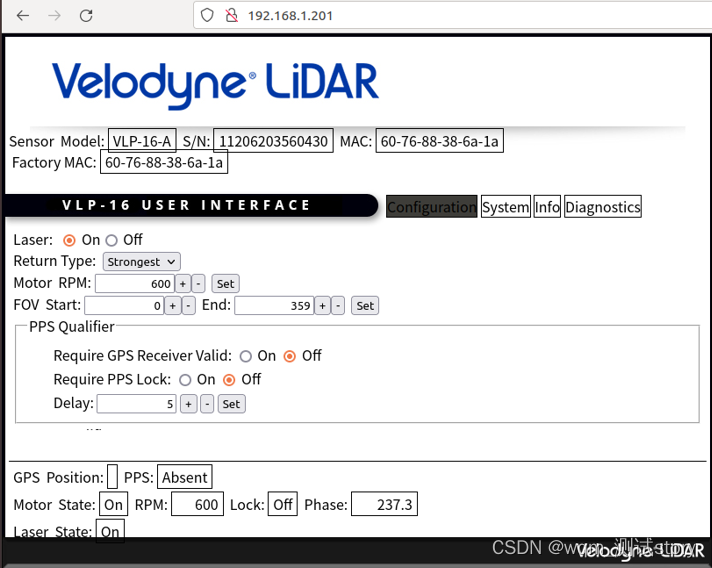
Velodyne16默认IP : 192.168.1.201,
将有线IP设置为同一网段:192.168.1.xxx,子网掩码:255.255.255.0
验证是否设置成功:
ping 192.168.1.201
#或者直接浏览器中输入 192.168.1.201
3.安装
#安装依赖
sudo apt-get install ros-melodic-velodyne
#下载功能包
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
#编译所有功能包,因为catkin_make 命令只会编译最后一次编译过的功能包
catkin_make -DCATKIN_WHITELIST_PACKAGES=' '
source devel/setup.bash
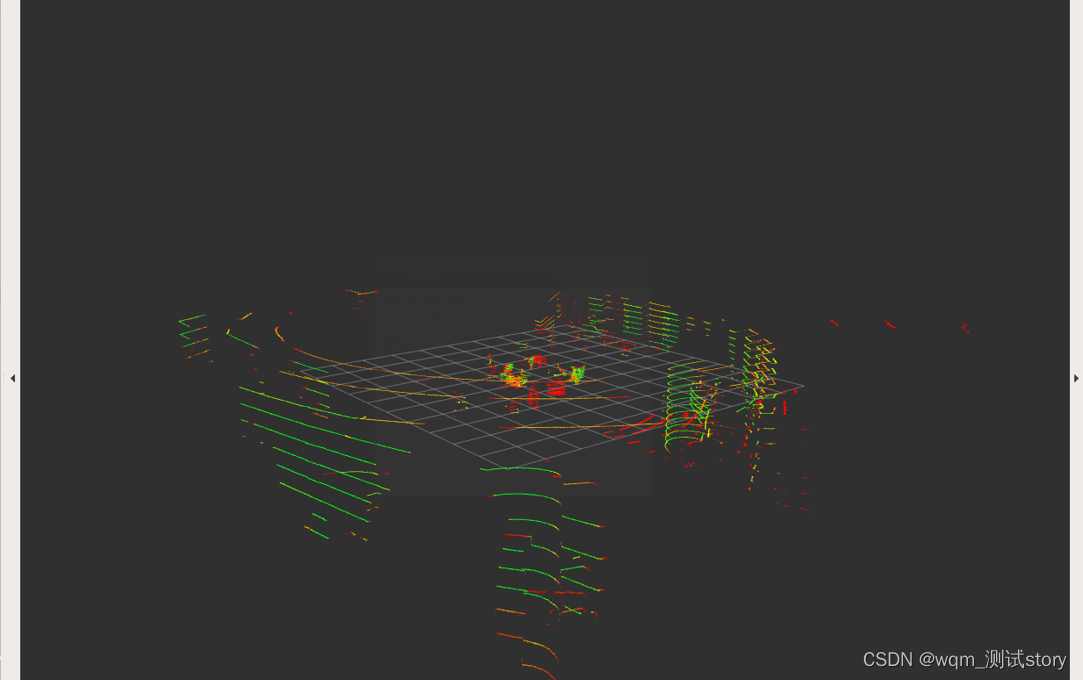
#通过Rviz查看点云
roslaunch velodyne_pointcloud VLP16_points.launch
rosrun rviz rviz -f velodyne
4. 点云数计算
velodyne-16线的水平方向角度分辨率为0.2,则一线的扫描点数为360/0.2=1800,共16线,则总共的点云数为:1800*16 = 30w(估值)


















 2725
2725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









