



制作一个友好的机器手
前言
在机器人技术不断发展的今天,机械手作为机器人的重要组成部分,已经广泛应用于工业生产、医疗辅助、服务机器人等多个领域。一个能够与人类友好互动的机器手不仅可以提升机器人的实用性,还能增加其趣味性和亲和力。今天,我将分享一个有趣的项目——制作一个友好的机器手,当有人经过时,它会自动挥手致意。这个项目不仅涉及机械设计和电子控制,还融合了传感器技术,是一个非常有趣的 DIY 项目。
项目简介
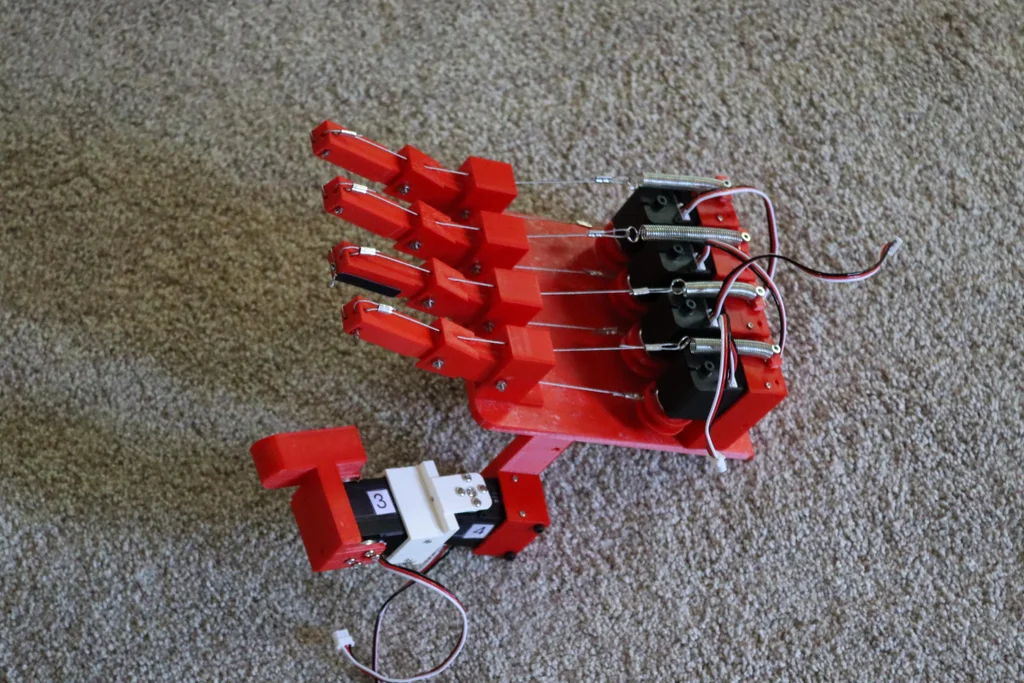
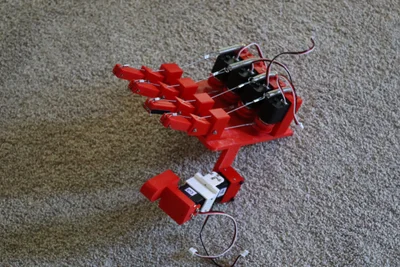
这个项目是一个五指机械手,当有人经过时,它会自动进行“挥手”动作。这个项目的灵感来源于一个车库创业公司正在开发的开源人形机器人(身高约 4.5 英尺),预计今年夏天发布。我有幸成为首批体验者之一。这是我第一次尝试制作一个五指机械手,虽然它的尺寸比我预期的要大一些,而且钢丝对 3D 打印塑料的磨损也比较严重,但我认为它有很大的潜力。
所需材料
以下是制作这个友好机器手所需的材料清单:
- Waveshare ST3215 伺服电机:6 个。这些伺服电机带有磁性编码器,比传统的“有刷反馈”伺服电机更可靠。
- 串行总线伺服驱动板:用于控制所有伺服电机。
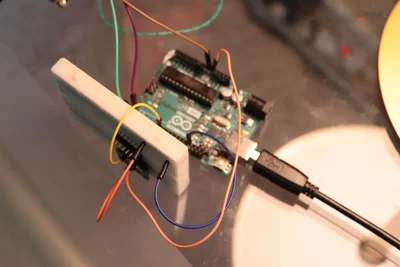
- Arduino Uno:作为主控制器。
- 12V 2A 直流电源:为整个系统供电。
- 不锈钢钢丝:1/32 英寸,以及配套的压接端子。
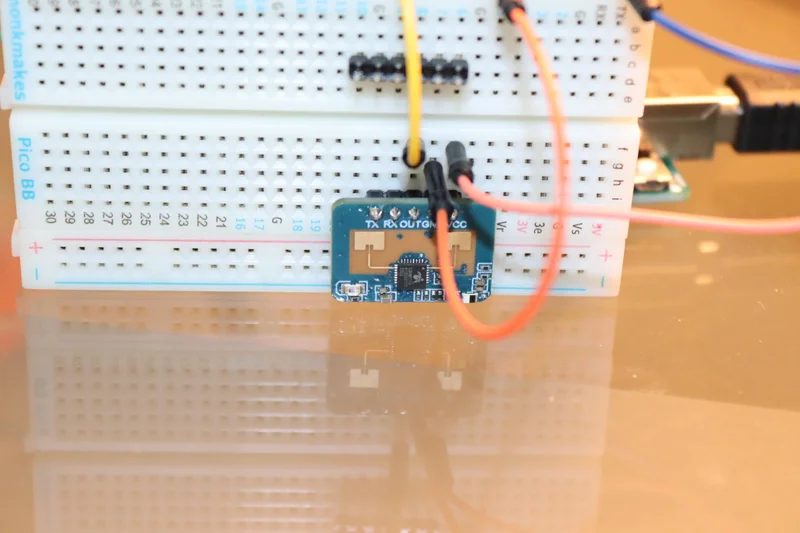
- 人体存在雷达传感器:用于检测人是否经过。
- 3D 打印部件:包括手指、关节、卷轴等。
- 3mm 螺丝:若干,用于固定各个部件。
- 防滑胶带:用于增加手指的抓握力。
- 弹簧:用于提供适当的张力。
制作步骤
第一步:伺服电机的设置
每个串行伺服电机都需要有自己的地址,并且需要设置在中心位置。具体的设置方法可以参考我在 Instructables 上的另一篇教程。我选择这些伺服电机的原因是它们带有磁性编码器,比传统的“有刷反馈”伺服电机更可靠。此外,串行控制减少了布线,因为只需要一条控制线就可以控制所有电机。
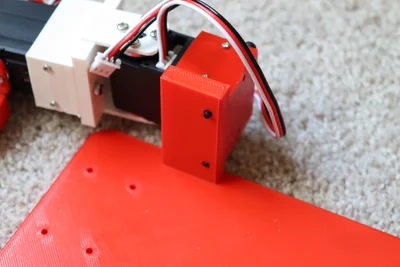
第二步:连接卷轴
- 使用 3 个 M3×16mm 螺丝将卷轴连接到伺服电机的角上。
- 使用 1 个 M3×12mm 螺丝连接运行手指的钢丝。
- 使用设置手指的 Arduino 程序,将卷轴定位在 9:00 位置,当伺服电机处于 3700 位置时。
- 安装伺服电机的角螺丝。


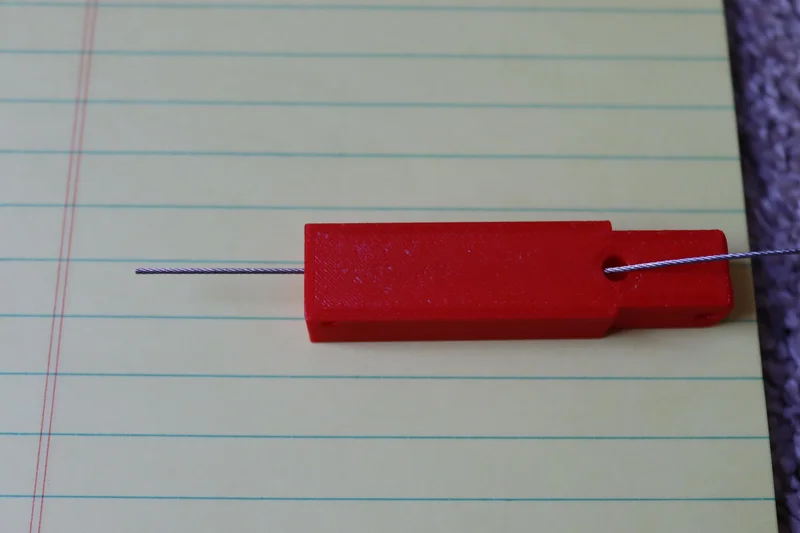
第三步:准备钢丝
- 剪两段 275mm 长的细钢丝。
- 将下端钢丝穿过手指的末端并压接。
- 将上端钢丝穿过手指的末端并压接。
- 将下端钢丝穿过中指,上端钢丝穿过中指。

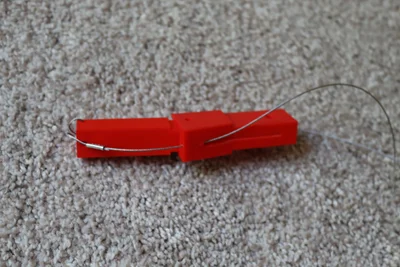
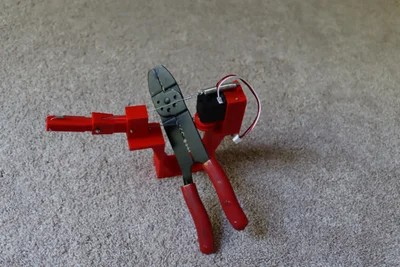
第四步:使用设置夹具
- 使用一个特殊的 3D 打印夹具,配备 12mm 和 30mm 螺丝,用于固定手指的设置。
- 用 1/8 英寸的钻头钻一个孔——夹具上没有设计这个孔。
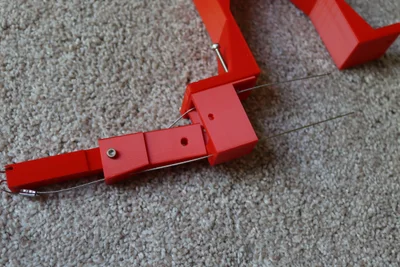
- 安装指关节到设置夹具上。
- 使用 M3×20mm 螺丝将手指的末端连接到中指的中间,作为手指的轴承。
- 将上端钢丝穿过指关节。
- 安装 M3×25mm 螺丝穿过指关节,作为轴承点。


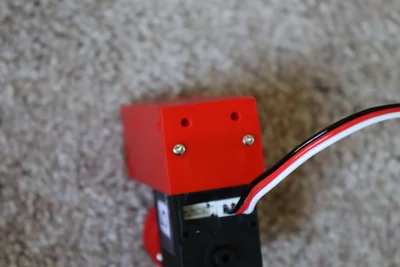
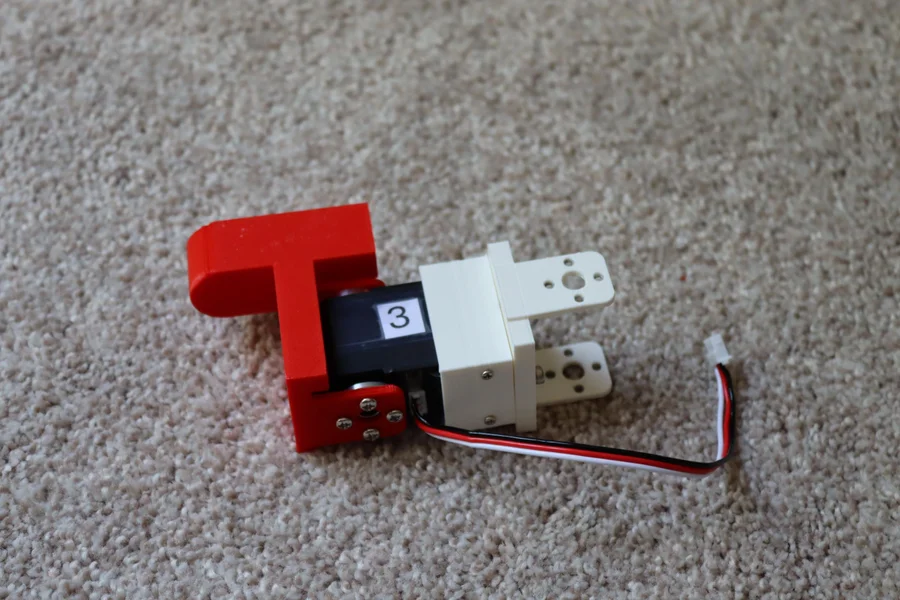
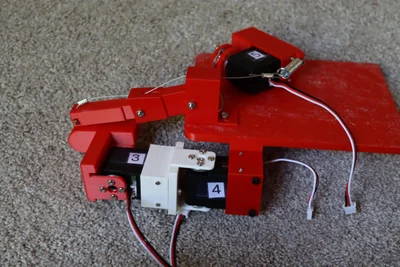
第五步:固定伺服电机
- 使用伺服电机附带的四个小螺丝固定伺服电机和伺服电机安装座。
- 使用 2 个 M3×20mm 螺丝将伺服电机安装到测试夹具的后部。
- 将扩展弹簧(直径 8.7mm,长 46.8mm)固定到伺服安装座的顶部。
- 使用 M3×12mm 螺丝穿过 3D 打印的垫圈,固定弹簧。
- 调整钢丝的张力,使手指完全处于向上位置,并压接钢丝。
- 对于下端钢丝,将特殊的压接端子压在钢丝上,穿过下端滑轮,收紧并压接钢丝。
- 移除设置夹具。
- 最终组装:使用 2 个 M3×10mm 螺丝固定在手腕的前面,以及 2 个 M3×30mm 螺丝固定在手腕的后面。
- 固定手指和伺服电机。
- 重复上述过程三次。
- 按照照片所示固定拇指。
第六步:安装防滑胶带
防滑胶带虽然价格昂贵,但对抓手来说非常有效。你可能会注意到我在拇指中安装了压力传感器和传感器线——这似乎不能很好地绕过半径,因此感应功能将是后续的项目。
项目总结
这个友好的机器手项目是一个非常有趣的 DIY 项目,它不仅展示了机械设计和电子控制的基本原理,还融合了传感器技术,使机器手能够与人类进行简单的互动。虽然在制作过程中遇到了一些问题,比如钢丝对 3D 打印塑料的磨损,但这些问题都可以通过进一步的优化和改进来解决。
在未来的工作中,我计划进一步优化手指的设计,使其更加紧凑和耐用。此外,我还将尝试改进感应功能,使其能够更准确地检测人类的存在。我相信,通过不断的努力和改进,这个友好的机器手项目将能够成为一个更加实用和有趣的机器人应用。
希望你喜欢这个项目,并在构建过程中找到乐趣!如果你有任何问题或需要帮助,欢迎在评论区交流。
作者:Svan.
注意:本博文为不得在未经本人同意进行转载或者二次创作,违者必究!!!


















 1242
1242

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











