




树莓派接口:驱动
IO口: input output 对主控来说
input: 人体,火焰,烟雾,震动
output:继电器,蜂鸣器
**PWM:**电机调速,灯光调明亮度
串口: uart
IIC
SPI
IIS 等等(多基通信方案)
其他特定硬件的接口:flash
其他的开发,例如海思,瑞芯微,2440,tiny等等.
没有OS的如:51,stm32,Arduino等等。
wiringpi库
特定平台,特定功能接口
硬件初始化函数
int wiringPiSetup (void)
返回:执行状态,-1表示失败
当使用这个函数初始化树莓派引脚时,程序使用的是wiringPi 引脚编号表。引脚的编号为 0~16
需要root权限
int wiringPiSetupGpio (void)
返回执行状态,-1表示失败
当使用这个函数初始化树莓派引脚时,程序中使用的是BCM GPIO 引脚编号表。
需要root权限
硬件初始化:
#include <wiringPi.h>
int main()
{
wiringPiSetup();
}
gcc demo1.c -lwiringPi
通用GPIO控制函数
void pinMode (int pin, int mode)
- pin:配置的引脚 mode:指定引脚的IO模式 可取的值:INPUT、OUTPUT、PWM_OUTPUT,GPIO_CLOCK
- 作用:配置引脚的IO模式 注意:
只有wiringPi 引脚编号下的1脚(BCM下的18脚) 支持PWM输出
只有wiringPi编号下的7(BCM下的4号)支持GPIO_CLOCK输出
void digitalWrite (int pin, int value)
- pin:控制的引脚 value:引脚输出的电平值。 可取的值:HIGH,LOW分别代表高低电平
- 让对一个已近配置为输出模式的 引脚 输出指定的电平信号
int digitalRead (int pin)
- pin:读取的引脚
返回:引脚上的电平,可以是LOW HIGH 之一 - 读取一个引脚的电平值 LOW HIGH ,返回
void analogWrite(int pin, int value)
- pin:引脚
value:输出的模拟量 - 模拟量输出
树莓派的引脚本身是不支持AD转换的,也就是不能使用模拟量的API,
需要增加另外的模块
int analogRead (int pin)
- pin:引脚
返回:引脚上读取的模拟量 - 模拟量输入
树莓派的引脚本身是不支持AD转换的,也就是不能使用模拟量的API,
需要增加另外的模块
void pwmWrite (int pin, int value)
- pin:引脚
value:写入到PWM寄存器的值,范围在0~1024之间。 - 输出一个值到PWM寄存器,控制PWM输出。 pin只能是wiringPi 引脚编号下的1脚(BCM下的18脚)
void pullUpDnControl (int pin, int pud)
- pin:引脚
pud:拉电阻模式
可取的值:PUD_OFF 不启用任何拉电阻。关闭拉电阻。
PUD_DOWN 启用下拉电阻,引脚电平拉到GND
PUD_UP 启用上拉电阻,引脚电平拉到3.3v - 对一个设置IO模式为 INPUT 的输入引脚设置拉电阻模式。
与Arduino不同的是,树莓派支持的拉电阻模式更丰富。
树莓派内部的拉电阻达50K欧姆
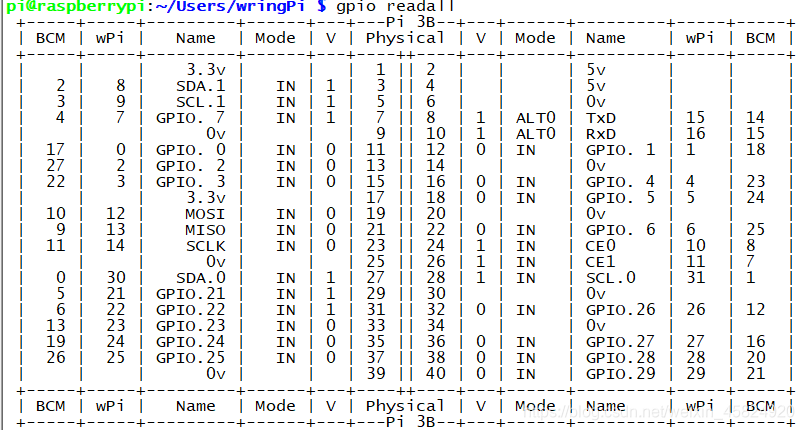
树莓派IO口
输入:gpio readall
控制继电器(简易)
#include <wiringPi.h>
#include <stdio.h>
int main()
{
int cmd;//输入指令
if(wiringPiSetup()==-1)//设备初始化
{
printf("硬件接口初始化失败\n");
return -1;
}
pinMode(7,OUTPUT); 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1285
1285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











